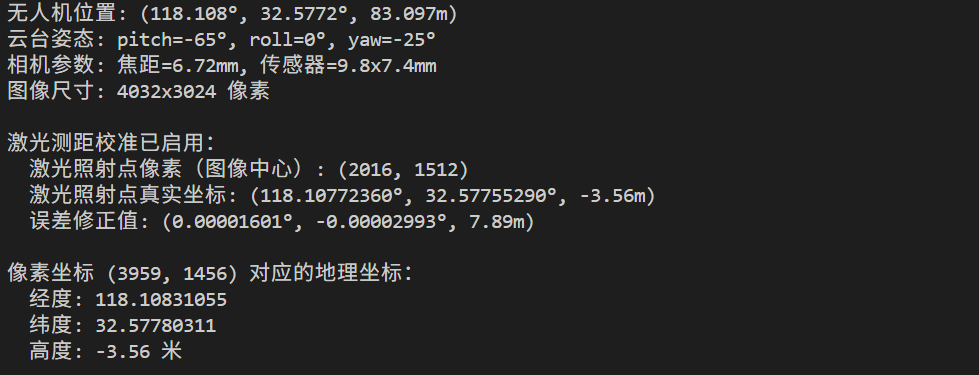
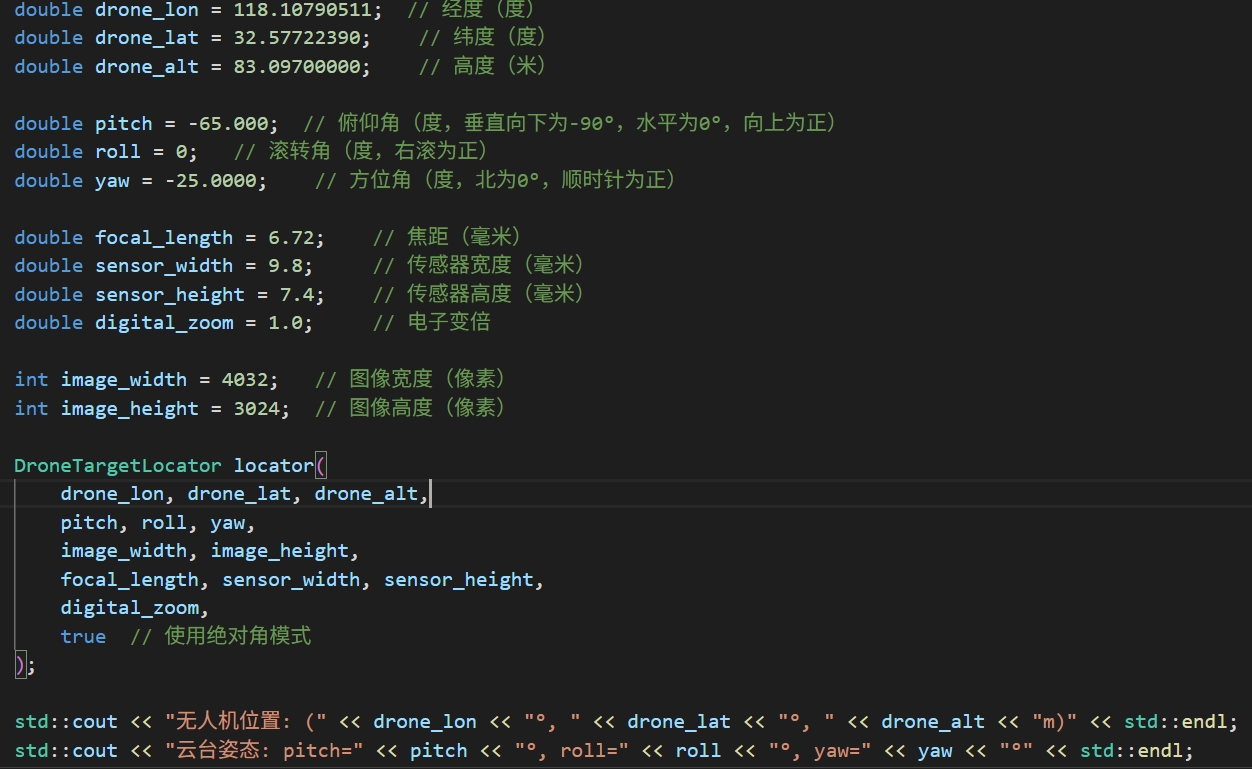
获取大疆无人机拍照图像,通过飞行遥测和相机参数,计算任意像素坐标下对应的地理位置坐标;
在激光测距有效的情况下,云台垂直向下时,定位误差不超过3m。
通过在线exif工具可以解析图像参数EXIF在线工具

获取参数后,先对像素坐标转相机坐标系
cpp
std::vector<double> DroneTargetLocator::pixelToCameraNormalized(
double px, double py) const {
// 计算有效焦距(考虑电子变倍)
// 焦距单位:毫米(mm)
double effective_focal = focal_length_ * digital_zoom_;
// 计算像素到物理尺寸的转换比例
// sensor_width_ 和 sensor_height_ 单位:毫米(mm)
// image_width_ 和 image_height_ 单位:像素
// pixel_size_x/y 单位:毫米/像素(mm/pixel)
double pixel_size_x = sensor_width_ / static_cast<double>(image_width_);
double pixel_size_y = sensor_height_ / static_cast<double>(image_height_);
// 将像素坐标转换为相对于图像中心的坐标(像素单位)
double cx = px - image_width_ / 2.0;
double cy = image_height_ / 2.0 - py; // Y轴翻转(图像坐标系Y向下,相机坐标系Y向上)
// 转换为物理尺寸(毫米)
// cx * pixel_size_x 单位:像素 * (mm/pixel) = mm
// cy * pixel_size_y 单位:像素 * (mm/pixel) = mm
double x_mm = cx * pixel_size_x;
double y_mm = cy * pixel_size_y;
// 归一化到相机坐标系
// 大疆相机坐标系:X右,Y上,Z前(光轴方向)
// 归一化向量:相机坐标系中指向目标点的单位方向向量
// x_mm / effective_focal 单位:mm / mm = 无量纲
// y_mm / effective_focal 单位:mm / mm = 无量纲
double x_norm = x_mm / effective_focal;
double y_norm = y_mm / effective_focal;
double z_norm = 1.0; // 焦距归一化
// 归一化为单位向量
double norm = std::sqrt(x_norm * x_norm + y_norm * y_norm + z_norm * z_norm);
if (norm < 1e-10) {
// 避免除零,如果norm太小,返回光轴方向
return {0.0, 0.0, 1.0};
}
return {x_norm / norm, y_norm / norm, z_norm / norm};
}如果相机安装和云台保持一致,不需要考虑转换。
将云台坐标系转NED坐标系,部分代码如下:
cpp
// 绝对角模式:云台角度直接相对于NED坐标系(地理坐标系)
// 大疆无人机角度定义:
// - 俯仰角:垂直向下为-90°,水平为0°,向上为正
// - 滚转角:右滚为正
// - 方位角:北为0°,顺时针为正
// 相机坐标系:X右,Y上,Z前(光轴)
// NED坐标系:X北,Y东,Z地(向下)
// 大疆绝对角模式下的转换逻辑:
// 1. 当pitch=0, roll=0, yaw=0时,相机Z前应指向NED X北(水平向前)
// 2. 当pitch=-90°, roll=0, yaw=0时,相机Z前应指向NED Z地(垂直向下)
// 3. 当pitch=0, roll=0, yaw=90°时,相机Z前应指向NED Y东(水平向右)
// 基础对齐矩阵:将相机坐标系对齐到NED坐标系(当所有角度为0时)
// 相机Z前 -> NED X北,相机X右 -> NED Y东,相机Y上 -> NED Z地(取反)
std::vector<std::vector<double>> R_base(3, std::vector<double>(3));
R_base[0][0] = 0.0; R_base[0][1] = 0.0; R_base[0][2] = 1.0; // N = 相机Z(前)
R_base[1][0] = 1.0; R_base[1][1] = 0.0; R_base[1][2] = 0.0; // E = 相机X(右)
R_base[2][0] = 0.0; R_base[2][1] = -1.0; R_base[2][2] = 0.0; // D = -相机Y(上,取反因为NED的Z向下)最后NED转换为地理坐标,(部分代码如下)
cpp
/ NED坐标系:N(北)、E(东)、D(地/下)
// 将NED向量转换为地理坐标
// ned_vec是单位方向向量,需要根据实际距离计算NED坐标
// 计算方向向量的分量
double dir_north = ned_vec[0];
double dir_east = ned_vec[1];
double dir_down = ned_vec[2];
// 检查方向向量是否有效
double norm = std::sqrt(dir_north * dir_north + dir_east * dir_east + dir_down * dir_down);
if (norm < 1e-6) {
return GeoCoordinate(drone_longitude_, drone_latitude_, drone_altitude_);
}
// 归一化方向向量
dir_north /= norm;
dir_east /= norm;
dir_down /= norm;
// 根据相机视线方向计算实际距离
// 假设目标在地面上(高度为0),根据高度差和视线方向计算距离
double distance = 0.0;
// 假设目标高度为0(地面),或可以根据实际情况调整
double target_height = 4.32; // 目标高度(米),可以根据实际情况修改
double height_diff = drone_altitude_ - target_height;如果激光测距有效,可以使用激光测距进行修正。