目录
1.摘要
无人机在搜救任务中被广泛应用,可通过协同编队快速覆盖大范围区域,提高搜救效率。针对有风条件下多无人机对矩形区域进行快速覆盖的问题,本文将搜索区域离散为网格,并构建混合整数规划模型。通过推导目标函数的精确下界,本文提出了一种高效算法,能够获得最优解或与最优解具有常数绝对差距的近最优解。随着问题规模增大,该方法的相对最优性差距持续减小,且计算成本远低于直接求解混合整数规划。数值实验表明,该算法在多达 10,000 个网格单元的场景下仍具有极高的计算效率。
2.问题描述
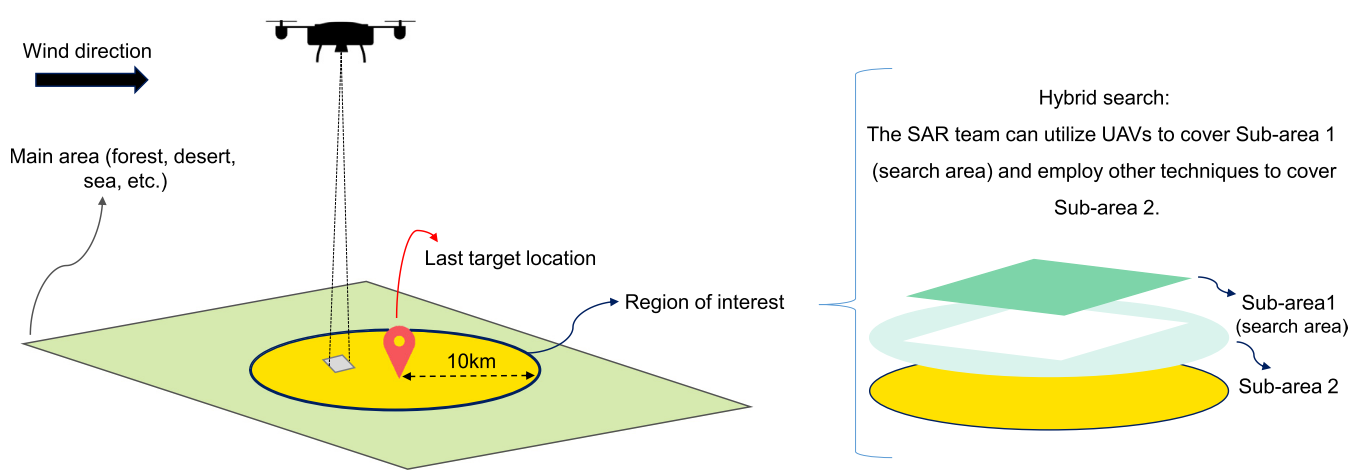
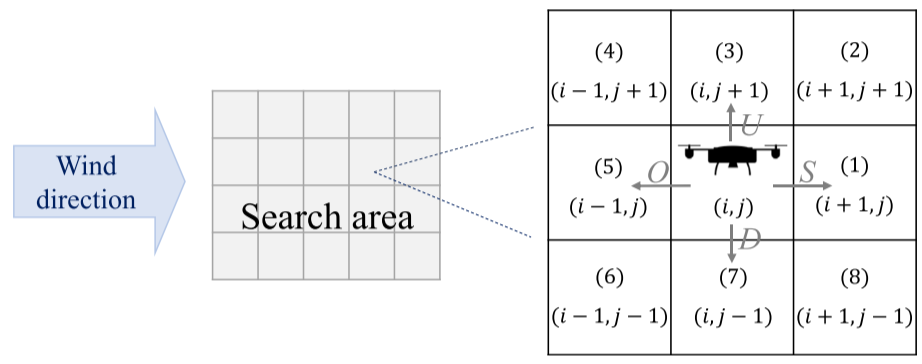
本文以山区等人迹稀少区域的失踪人员搜救为背景,研究在统一风场条件下多架无人机对矩形区域进行最短时间覆盖的路径规划问题。搜索区域被离散为规则网格,每个网格单元与无人机相机视场相匹配。假设无人机性能一致、风速恒定且方向固定,并显式考虑无人机间的避碰约束。基于网格模型,采用冯·诺依曼邻域定义无人机的可达移动方式,并区分顺风、逆风及垂直风向移动。
本文将多无人机覆盖路径规划问题建模为一个混合整数规划(MIP),以最小化整个搜索区域的作业时间。模型通过二元变量描述无人机在各时间步对网格单元的访问状态及其运动方向,并显式区分顺风、逆风和垂直风向移动。约束条件确保:每架无人机在任一时间步只能位于一个位置;所有网格单元至少被访问一次;任一时刻同一单元最多由一架无人机占据以避免碰撞;无人机只能在相邻网格间移动或离开搜索区域。作业时间被定义为所有无人机任务时间的最大值,并通过不同运动方向对应的时间成本进行刻画。
3.提出的算法
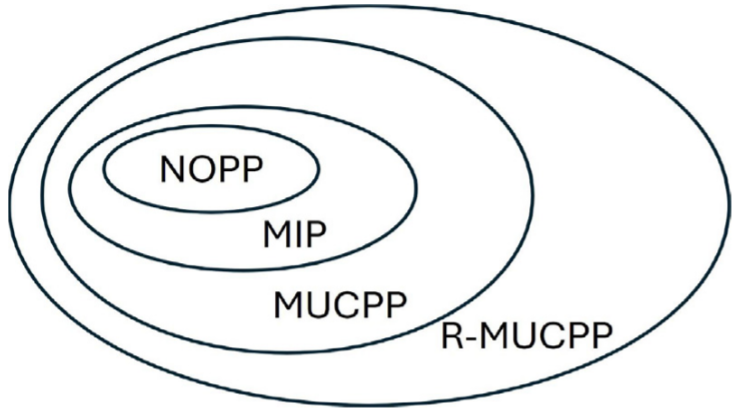
由于混合整数规划在大规模实例下计算代价极高,本文通过引入路径级决策变量并松弛碰撞约束,将原问题简化为多无人机覆盖路径规划问题(MUCPP):
min p d 1 , p d 2 , ... , p d q max i ∈ { 1 , 2 , ... , q } t p d i s.t. ⋃ i = 1 q p d i ′ = C ˉ , p d i ∈ P , ∀ i ∈ { 1 , 2 , ... , q } . \begin{aligned} \min_{p_{d_1},\,p_{d_2},\,\ldots,\,p_{d_q}} \; & \max_{i \in \{1,2,\ldots,q\}} \; t_{p_{d_i}} \\ \text{s.t.} \quad & \bigcup_{i=1}^{q} p'{d_i} = \bar{C}, \\ & p{d_i} \in \mathcal{P}, \quad \forall i \in \{1,2,\ldots,q\}. \end{aligned} pd1,pd2,...,pdqmins.t.i∈{1,2,...,q}maxtpdii=1⋃qpdi′=Cˉ,pdi∈P,∀i∈{1,2,...,q}.
将覆盖所有单元的严格约束松弛为分配单元总数不少于区域规模,得到松弛问题 R-MUCPP:
min p d 1 , p d 2 , ... , p d q max i ∈ { 1 , 2 , ... , q } t p d i s.t. ∑ i = 1 q d i ≥ n m , d i ∈ N , p d i ∈ P , ∀ i ∈ { 1 , 2 , ... , q } . \begin{aligned} \min_{p_{d_1},\,p_{d_2},\,\ldots,\,p_{d_q}} \; & \max_{i \in \{1,2,\ldots,q\}} \; t_{p_{d_i}} \\ \text{s.t.} \quad & \sum_{i=1}^{q} d_i \ge nm, \quad d_i \in \mathbb{N}, \\ & p_{d_i} \in \mathcal{P}, \quad \forall i \in \{1,2,\ldots,q\}. \end{aligned} pd1,pd2,...,pdqmins.t.i∈{1,2,...,q}maxtpdii=1∑qdi≥nm,di∈N,pdi∈P,∀i∈{1,2,...,q}.
R-MUCPP 的最优目标值构成 MUCPP 及原始 MIP 模型的有效下界。基于该下界,所提出算法的最优性差距可被精确界定,且仅可能为 0 或常数 T p T_p Tp。随着搜索区域规模增大,相对最优性差距趋于零,同时计算效率显著提升。
下界推导
在统一风场条件下,相邻网格中心距为 D ˉ \bar{D} Dˉ,无人机空速与风速分别为 v a v_a va 与 v w v_w vw ( v a > v w ≥ 0 v_a > v_w \geq 0 va>vw≥0),则三类基本移动时间为:
T s = D ˉ v a + v w T p = D ˉ v a 2 − v w 2 T o = D ˉ v a − v w T_{s}=\frac{\bar{D}}{v_{a}+v_{w}}\quad T_{p}=\frac{\bar{D}}{\sqrt{v_{a}^{2}-v_{w}^{2}}}\quad T_{o}=\frac{\bar{D}}{v_{a}-v_{w}} Ts=va+vwDˉTp=va2−vw2 DˉTo=va−vwDˉ
通过构造线性规划引理(Lemma 1),可证明在给定路径长度约束下,最优策略应优先采用时间代价较小的顺风与垂直风向移动。
结合均分原理(Lemma 2),在 q ≤ m ∣ q\leq m\mid q≤m∣的条件下,多无人机覆盖搜索区域的作业时间不小于:
( n − 1 ) T s + ( ⌈ n m q ⌉ − n ) T p (n-1)T_s+\left(\lceil\frac{nm}{q}\rceil-n\right)T_p (n−1)Ts+(⌈qnm⌉−n)Tp
近最优路径规划算法(NOPP)
本文提出了一种近最优路径规划算法 (NOPP),通过一组确定性构造过程生成可行解,其目标值必然落在集合 { L B , L B + T p } \left\{LB,LB+T_p\right\} {LB,LB+Tp}中,其中 L B LB LB 为 MUCPP 问题的理论下界。NOPP 构造的解满足原始 MIP 模型的全部约束,且每个网格单元恰好由一架无人机访问一次,从而保证覆盖的完整性与无冗余性。
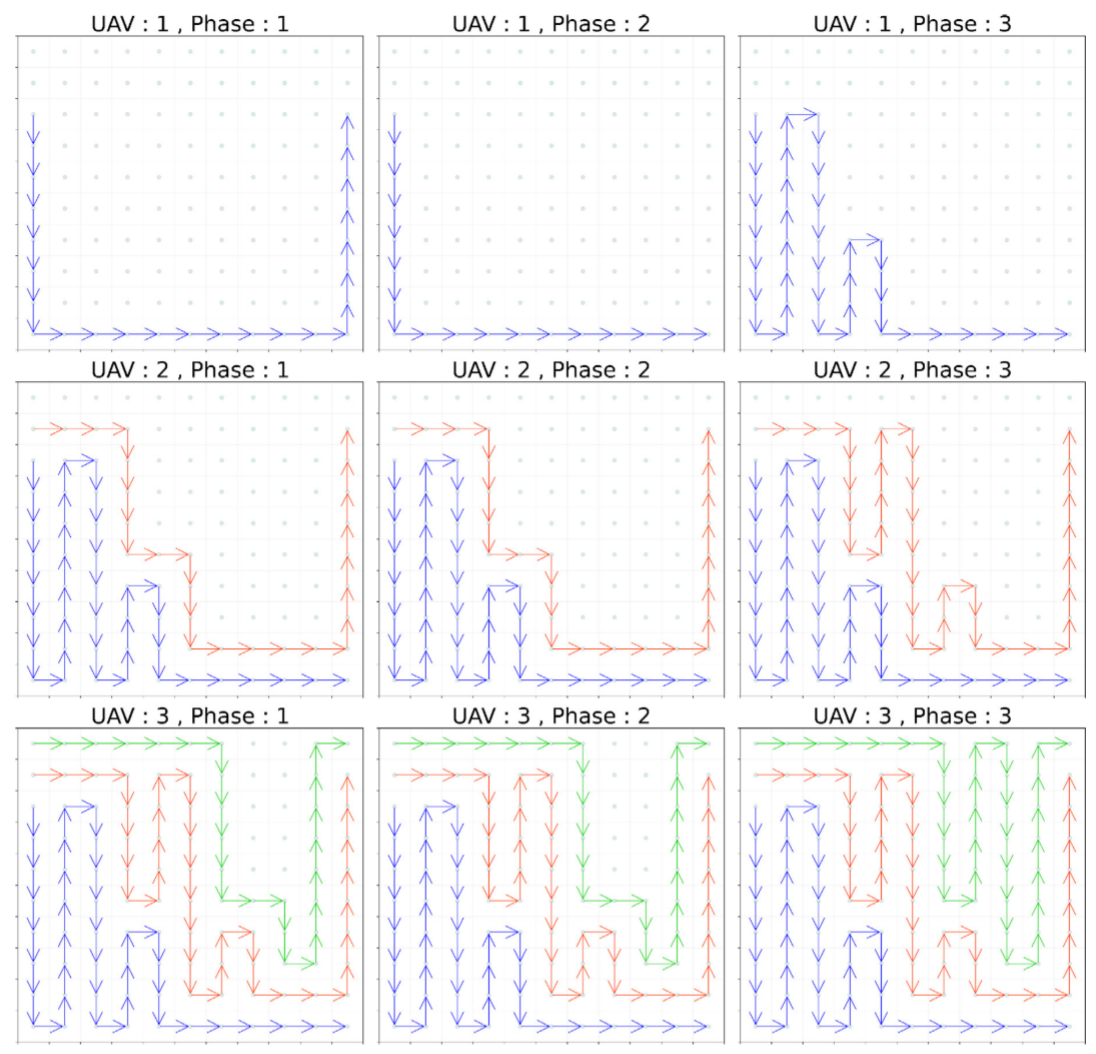
NOPP 通过对每架无人机依次执行四个阶段的子过程来生成飞行路径,并根据中间参数自适应地启用或跳过部分阶段。算法在大多数实际场景 ( q ≤ n ) (q\leq n) (q≤n)下直接适用;当 q > n q>n q>n时,可将问题分解为若干 q ≤ n q\leq n q≤n的子问题而不影响整体效率。结合由 R-MUCPP 得到的下界分析,可证明 NOPP 生成的解为最优或近最优,其相对最优性差距在问题规模增大时趋于零。
算法以理论下界为依据分配覆盖规模与移动配额,在保证边界约束与覆盖完整性的前提下,通过路径修正与局部插入逐步扩展覆盖范围。最终得到的作业时间必然等于下界或仅比下界多一个固定时间代价,因此在问题规模增大时具有渐近最优性。
4.结果展示
5.参考文献
1 Kazemdehbashi S, Liu Y. An algorithm with exact bounds for coverage path planning in UAV-based search and rescue under windy conditionsJ. Computers & Operations Research, 2025, 173: 106822.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx