〇、概述
VVLH和LVLH常见于STK软件中的坐标系,都是相对坐标系(原点在目标A中心的空间直角坐标系),通常用于表示目标B相对目标A的位置速度。需要目标A惯性系的位置速度来定义VVLH或LVLH坐标系,然后将目标B相对于目标A的惯性系的位置差和速度差再投影到所定义的坐标系,即为B相对A的相对坐标。
一、全称
VVLH Frame:Vehicle Velocity Local Horizontal coordinate frame。
LVLH Frame:Local Vertical Local Horizontal coordinate frame。
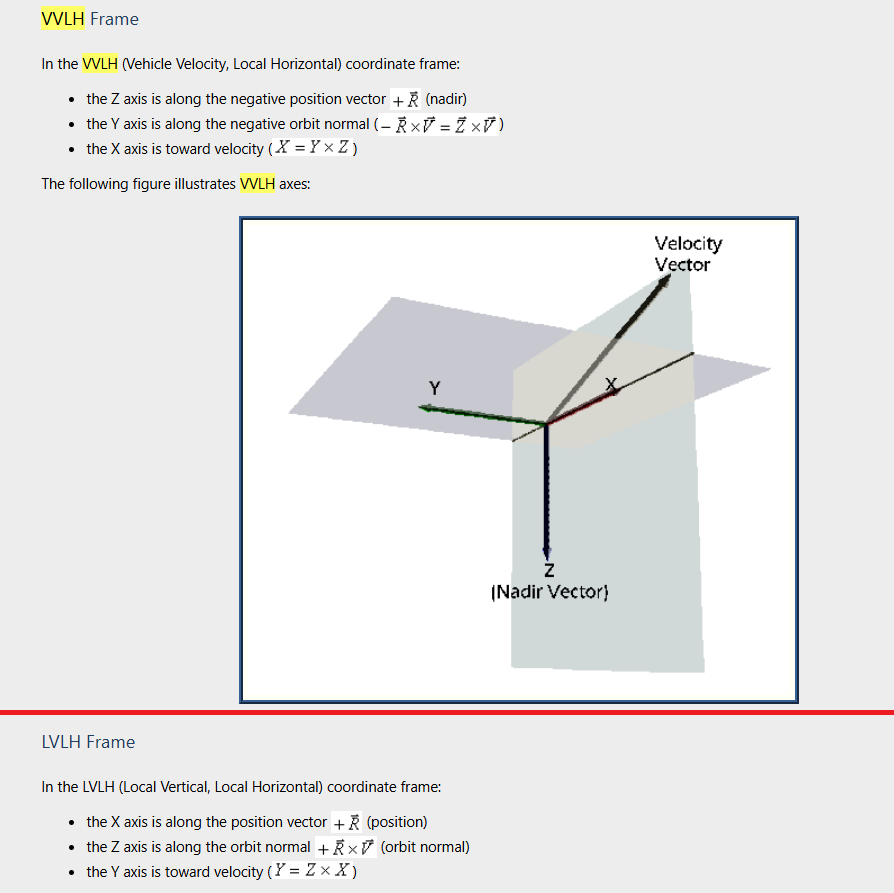
二、坐标轴定义
(1)定义
- LVLH: Local-Vertical Local-Horizontal axes align the X-axis along the position vector and the Y-axis toward the inertial velocity vector, and are dependent on the object.
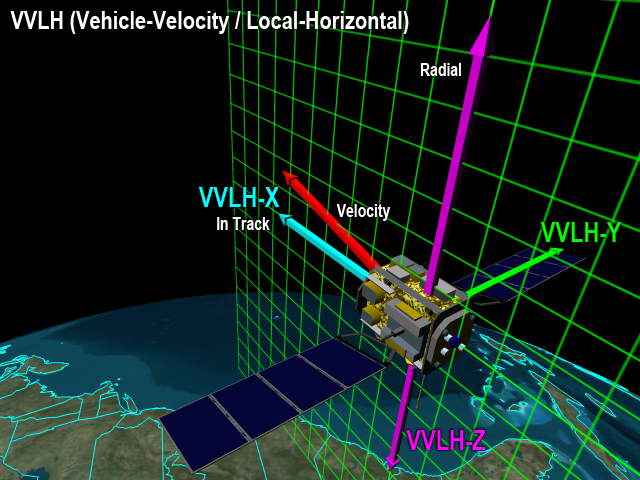
- VVLH: Vehicle Velocity Local Horizontal axes align the Z-axis opposite to the position vector and the X-axis toward the inertial velocity vector, and are dependent on the object.
(2)参考翻译
- LVLH: Local-Vertical Local-Horizontal (LVLH) 轴系:其 X 轴沿位置矢量方向对齐,Y 轴朝向惯性速度矢量方向,且依赖于该物体。
- VVLH: Vehicle Velocity Local Horizontal (VVLH) 轴系:其 Z 轴与位置矢量方向相反,X 轴朝向惯性速度矢量方向,且依赖于该物体。
(3)坐标轴定义顺序
三、坐标轴图示
(1)VVLH图示
(2)LVLH图示
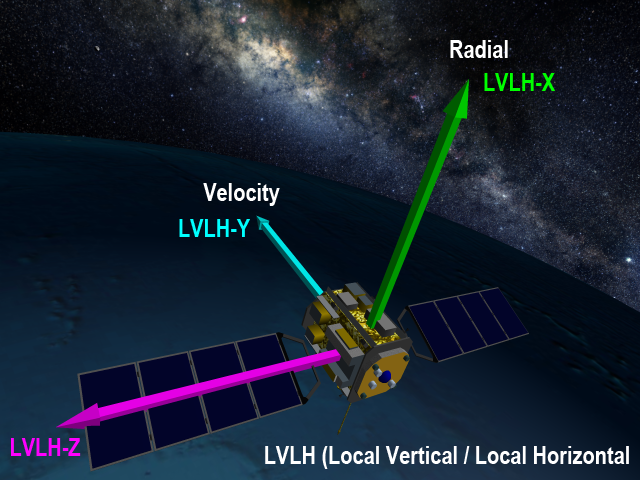
注意:图上Y轴和速度方向重合,只是特例,并不代表它们方向完全一致。
(3)VVLH和LVLH二合一图示(重点)
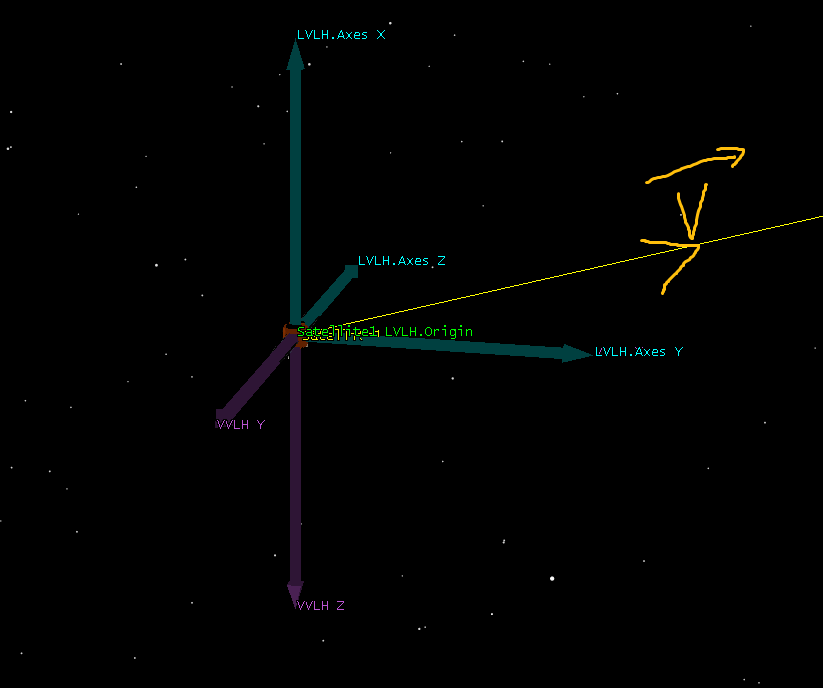
特别注意:VVLH和LVLH的三个轴就是对称的关系: LVLH.X = VVLH.-Z; LVLH.Y=VVLH.X; LVLH.Z=VVLH.-Y。
四、补充
补充1: 坐标系描述中的"along"与"toward"的区别
- along表示共线对齐,强调某轴与参考矢量方向完全平行、重合,是一种静态的几何对齐关系。
- toward 表示指向目标,强调从原点朝向某一矢量方向的动态导向性,隐含"朝向"或"对准"的动作意图。
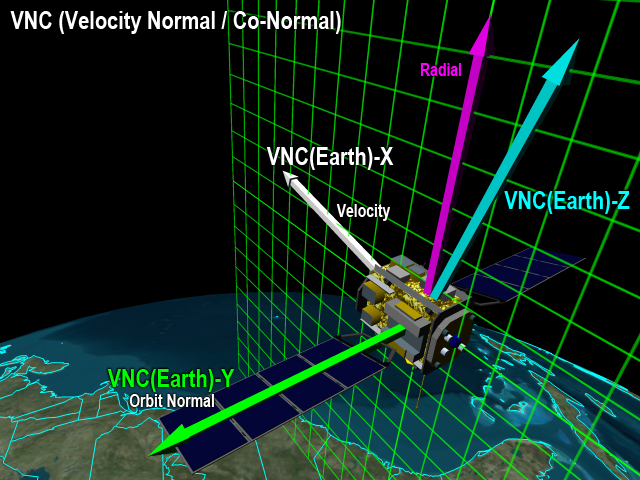
补充2: STK中的VNC坐标系(完全以速度惯性系速度定义X轴方向)
- VNC: Velocity Normal Co-Normal axes align the X-axis along the inertial velocity vector and the Z-axis toward the position vector, and are dependent on the object.
- VNC: Velocity Normal Co-Normal轴系将X轴沿惯性速度矢量方向对齐,Z轴指向位置矢量方向,且依赖于该物体。
补充3:国内类似的坐标定义和名称
国内通过使用UNM和RTN表示相对坐标系,特别是在接近分析时会用到,详请参考博文:https://blog.csdn.net/piaopiaolanghua/article/details/127375274
五、参考STK本地文档地址
file:///C:/Program Files/AGI/STK 11/Help/index.htm#stk/referenceframesvgt.htm?Highlight=LVLH
file:///C:/Program Files/AGI/STK 11/Help/index.htm#stk/referenceframesvgt.htm?Highlight=VVLH
file:///C:/Program Files/AGI/STK 11/Help/index.htm#gator/eq-coordsys.htm?Highlight=VVLH