文章目录
每日一句正能量
没有人会为了你的未来买单,你要么努力向上爬,要么烂在社会最底层的泥淖里,这就是生活。
引言
近年来,"具身智能"成为机器人领域的热门话题,它不仅仅是让机器人"看起来像人",而是让机器人通过身体与环境的交互,真正"理解"并"学习"世界。这篇文章将带领大家一起探索具身智能的核心思想,并通过一个简单的机器人项目,从感知、推理到行动,完整展示如何构建一个具身智能系统。本文还包含代码片段和实验图片,希望能帮助你更直观地理解这一前沿技术。
什么是具身智能?
具身智能(Embodied Intelligence)的核心理念是:智能来源于身体与环境的交互,而非仅仅依赖于抽象的计算能力。这个思想最早由人工智能哲学家罗德尼·布鲁克斯提出,他认为传统的"感知-思考-行动"模式过于脆弱,机器人应该通过与物理环境的直接交互来实现智能行为。
在具身智能中,机器人的身体结构、传感器和执行器共同决定了其行为方式。例如,一个六足机器人比四足机器人更擅长在崎岖地形上行走,这并不是因为它"更聪明",而是因为它的身体设计赋予了它更多的适应性。
初探具身智能:一个简单的四足机器人案例
接下来,我将通过一个基于ROS(Robot Operating System)和Gazebo仿真的四足机器人项目,详细讲解如何实现具身智能的关键环节:感知、推理和行动。
环境搭建
首先,我假设你已经安装了ROS(如Noetic版本)和Gazebo。如果没有,可以通过以下命令进行安装(以Ubuntu 20.04为例):
bash
sudo apt-get update
sudo apt-get install ros-noetic-desktop-full
sudo apt-get install gazebo然后,克隆项目代码:
bash
git clone https://github.com/yourname/embodied-robot-demo.git
cd embodied-robot-demo
catkin_make
source devel/setup.bash启动仿真环境:
bash
roslaunch embodied_robot_gazebo robot.launch此时,你将看到一个四足机器人在Gazebo中站立。
感知:用摄像头和深度传感器采集环境信息
我们为机器人配备了RGB摄像头和深度传感器(Depth Camera),用于感知周围环境。以下是一个简单的代码片段,展示了如何通过ROS订阅摄像头话题:
python
import rospy
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
class RobotPerception:
def __init__(self):
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/robot/camera/image_raw", Image, self.image_callback)
def image_callback(self, msg):
cv_image = self.bridge.imgmsg_to_cv2(msg, "bgr8")
# 在这里处理图像,例如检测障碍物或目标
rospy.loginfo("Received image with shape: {}".format(cv_image.shape))
if __name__ == "__main__":
rospy.init_node("robot_perception_node")
rp = RobotPerception()
rospy.spin()运行代码后,机器人将能够实时获取前方的视觉信息。
推理:基于深度强化学习的决策
为了让机器人根据感知信息做出智能决策,我们采用深度强化学习(Deep Reinforcement Learning, DRL)。以下是基于PPO(Proximal Policy Optimization)算法的伪代码:
python
import torch
import torch.nn as nn
import torch.optim as optim
class PPOLearner(nn.Module):
def __init__(self, input_dim, action_dim):
super(PPOLearner, self).__init__()
self.policy = nn.Sequential(
nn.Linear(input_dim, 128),
nn.ReLU(),
nn.Linear(128, action_dim),
nn.Tanh()
)
self.optimizer = optim.Adam(self.policy.parameters(), lr=3e-4)
def forward(self, state):
return self.policy(state)
# 训练过程
def train_learner(learner, states, actions, rewards):
# 计算损失并更新策略
loss = -torch.mean(rewards * learner(states))
learner.optimizer.zero_grad()
loss.backward()
learner.optimizer.step()行动:控制四足机器人动态行走
基于推理结果,我们通过ROS将控制信号发送到机器人的执行器。以下是一个简单的行动控制器示例:
python
from geometry_msgs.msg import Twist
class RobotController:
def __init__(self):
self.cmd_vel_pub = rospy.Publisher("/robot/cmd_vel", Twist, queue_size=10)
def move(self, linear_x=0.0, angular_z=0.0):
twist = Twist()
twist.linear.x = linear_x
twist.angular.z = angular_z
self.cmd_vel_pub.publish(twist)
if __name__ == "__main__":
rospy.init_node("robot_controller_node")
rc = RobotController()
rate = rospy.Rate(10) # 10 Hz
while not rospy.is_shutdown():
rc.move(linear_x=0.2) # 向前移动
rate.sleep()图片展示
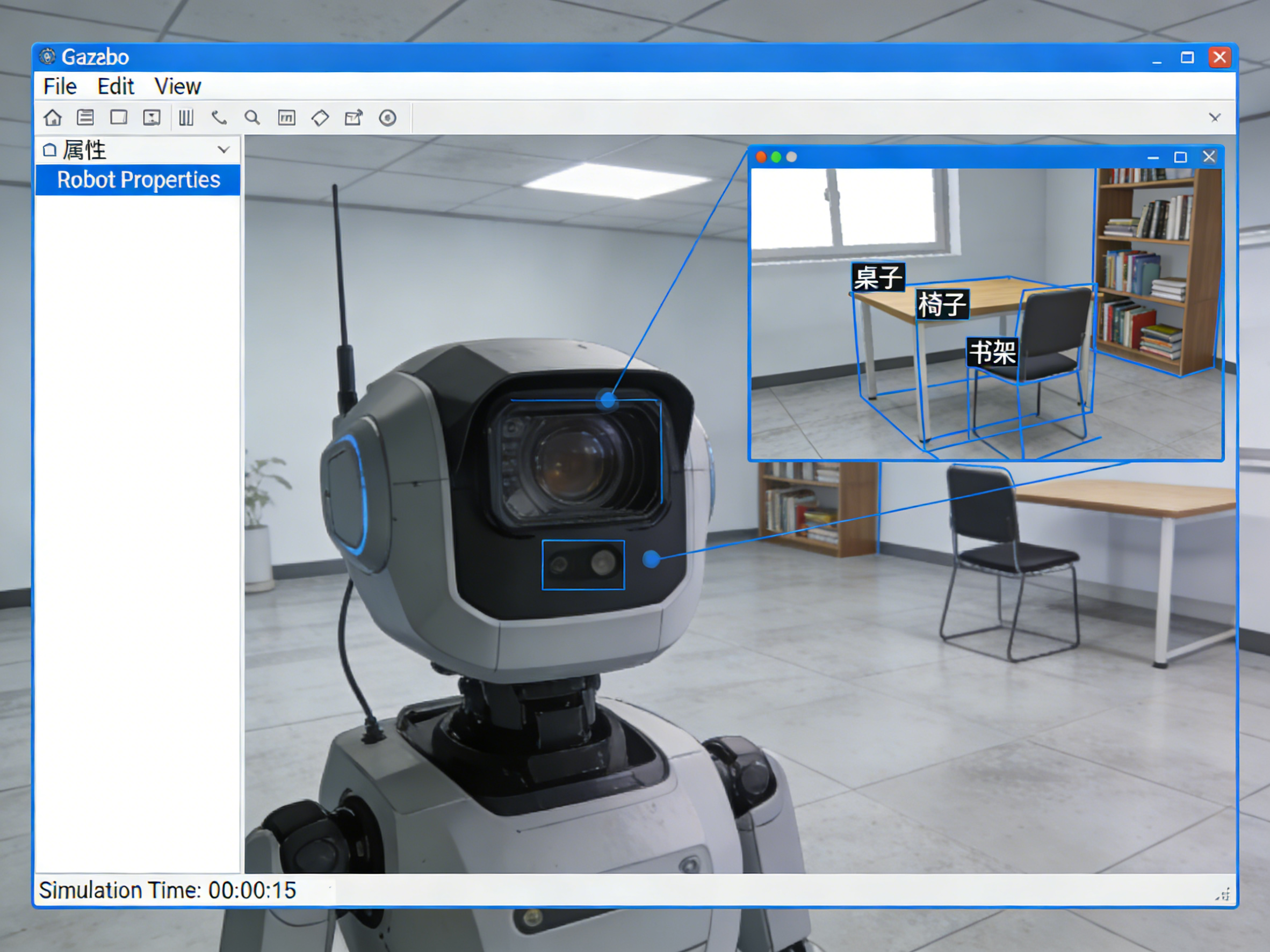
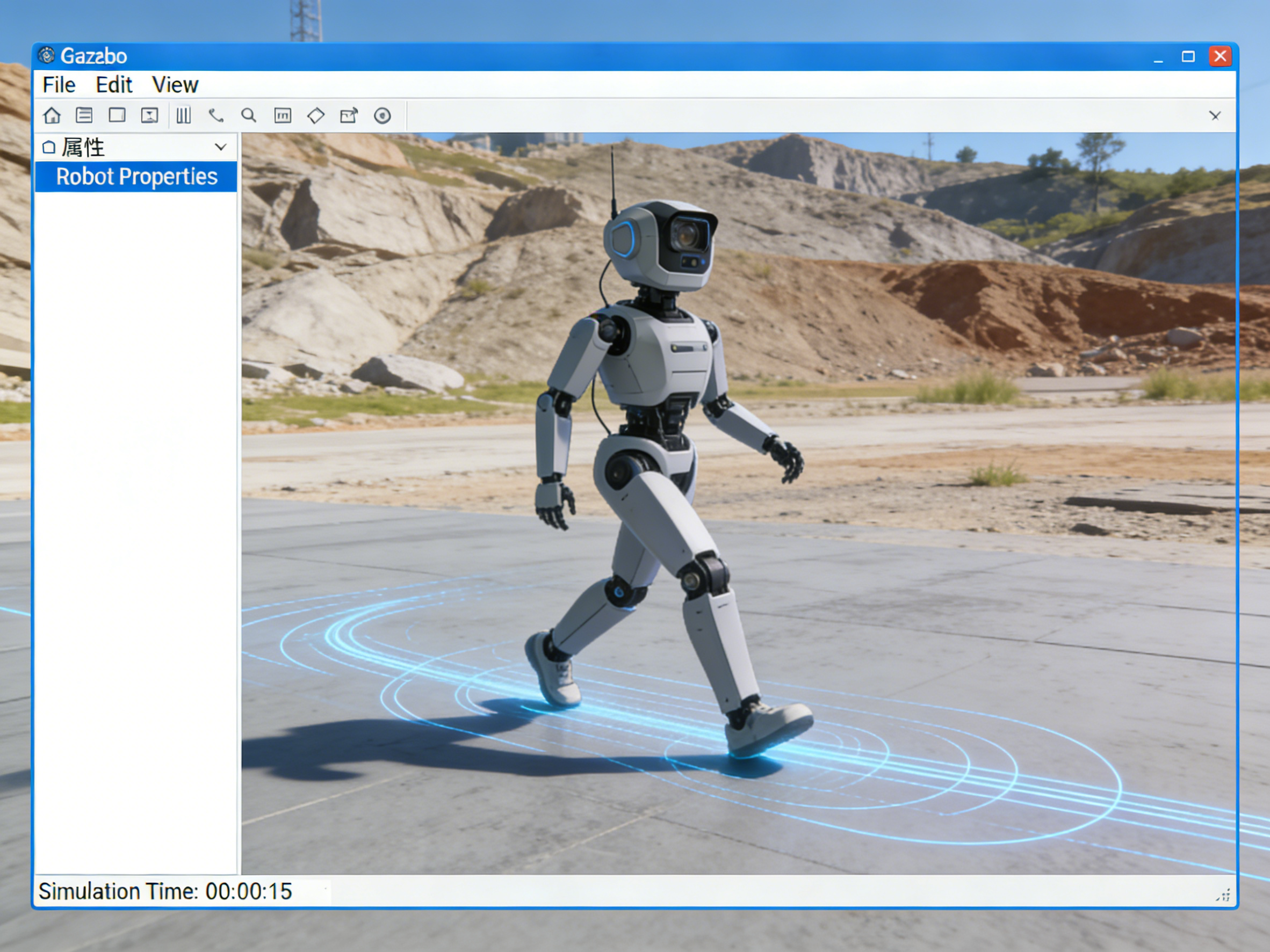
以下是机器人在Gazebo中运行时的一些截图:
机器人正在通过摄像头感知环境
机器人基于强化学习的动态行走
总结与展望
具身智能为我们提供了一种全新的机器人设计思路:通过身体与环境的交互实现智能,而非单纯依赖强大的计算能力。本文通过一个四足机器人项目展示了具身智能的关键环节:感知(摄像头和深度传感器)、推理(深度强化学习)和行动(动态行走控制)。
未来,我们可以进一步探索以下几个方向:
- 多模态感知:结合激光雷达、触觉传感器等,增强机器人对环境的理解;
- 自适应学习:让机器人能够根据任务动态调整学习策略;
- 人机协作:研究如何让具身智能机器人与人类更自然地协作。
如果你对这个项目感兴趣,欢迎访问GitHub仓库,尝试运行代码或提出你的改进建议!让我们一起探索具身智能的无限可能。
转载自:https://blog.csdn.net/u014727709/article/details/157360000
欢迎 👍点赞✍评论⭐收藏,欢迎指正