every blog every motto: There's only one corner of the universe you can be sure of improving, and that's your own self.
https://blog.csdn.net/weixin_39190382?spm=1010.2135.3001.5343
0. 引言
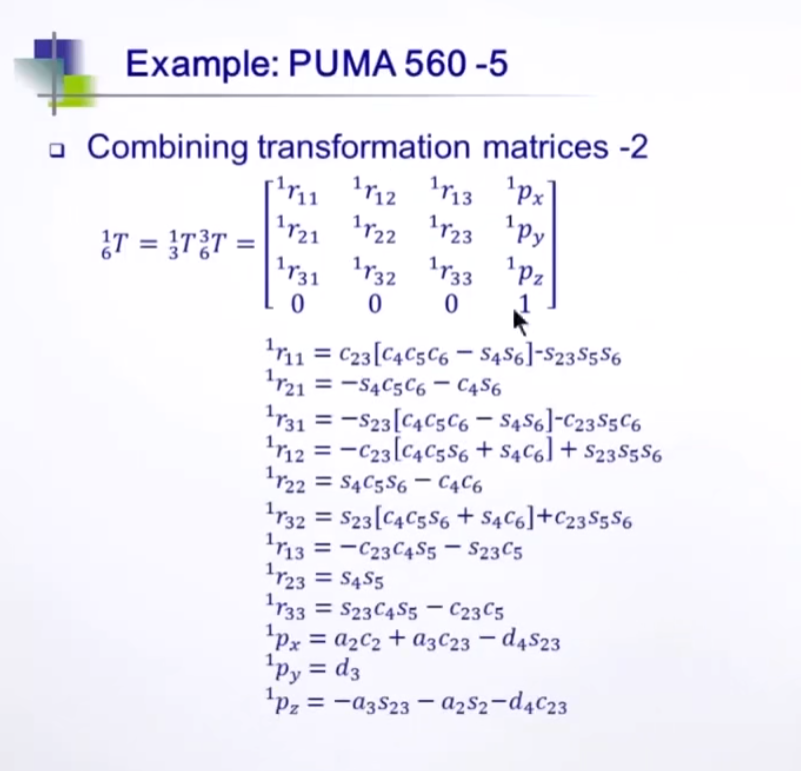
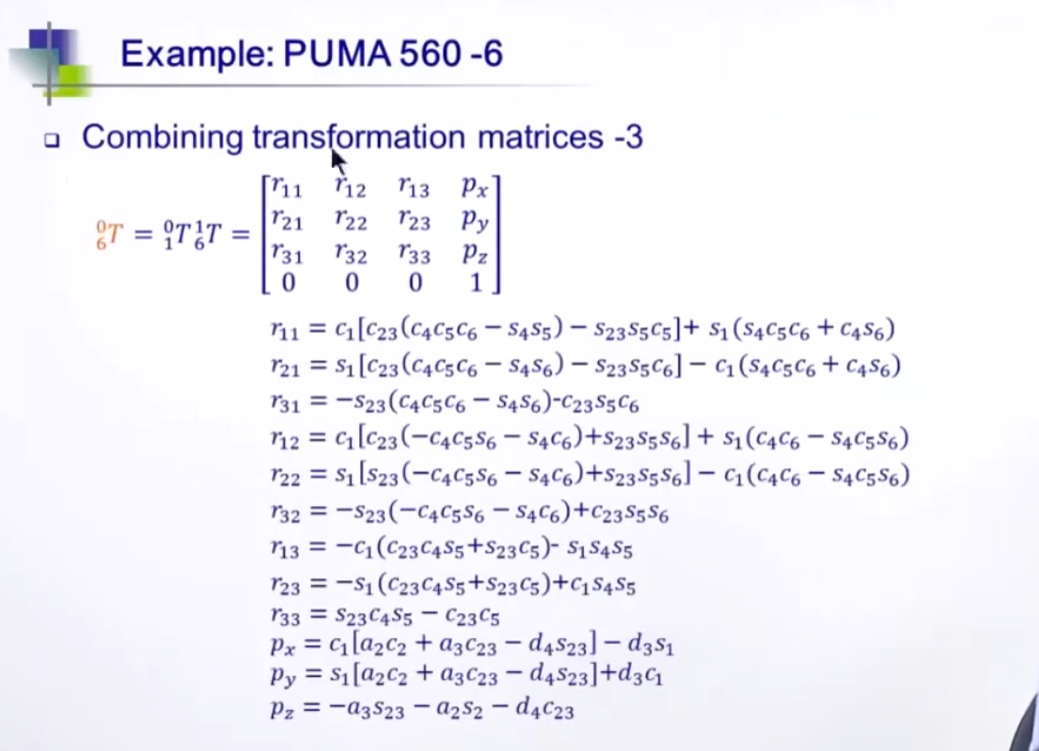
由DH表示法推到最终位姿
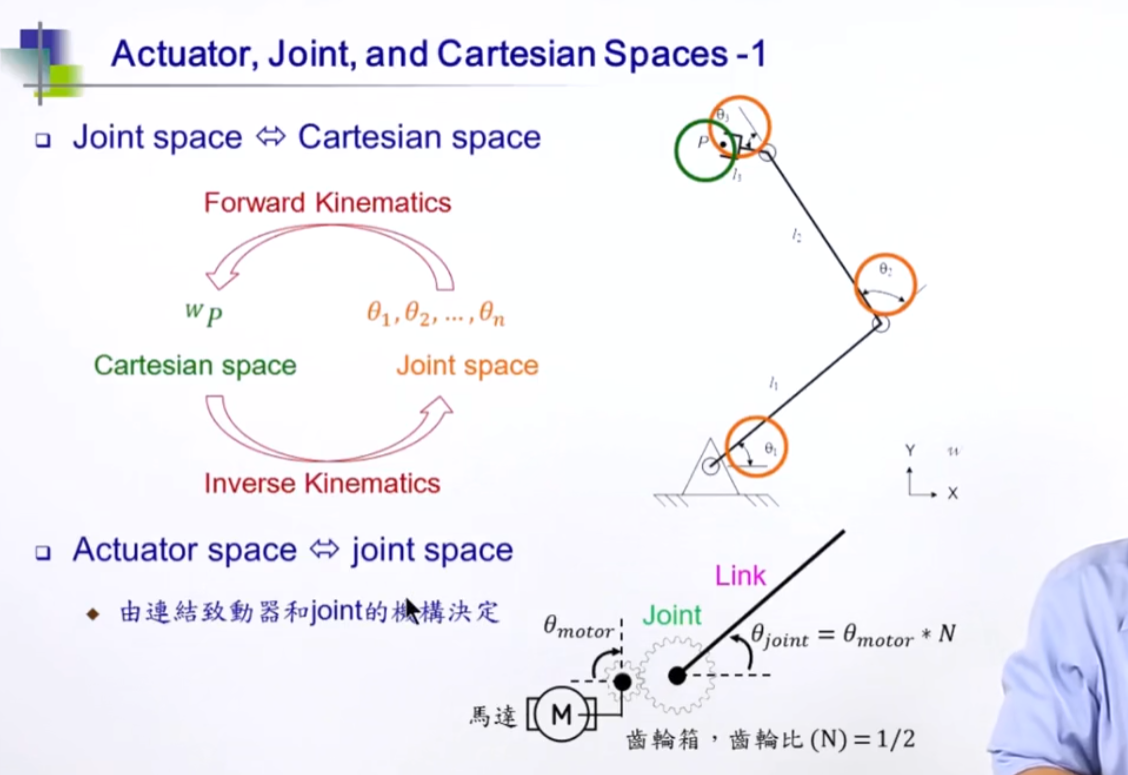
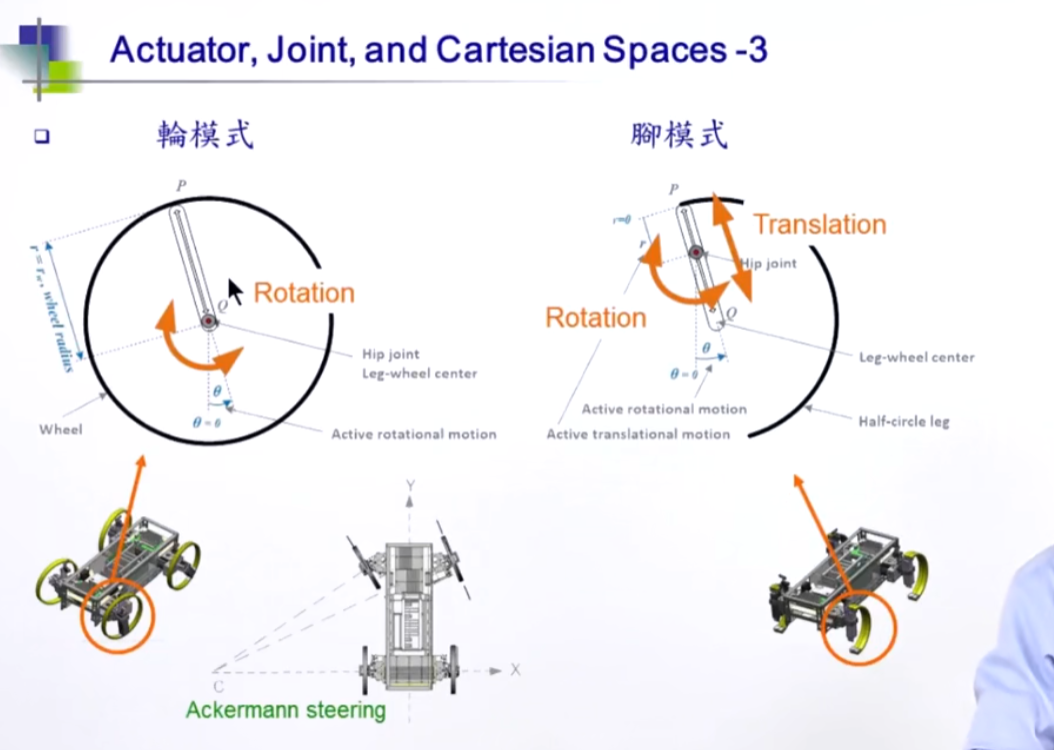
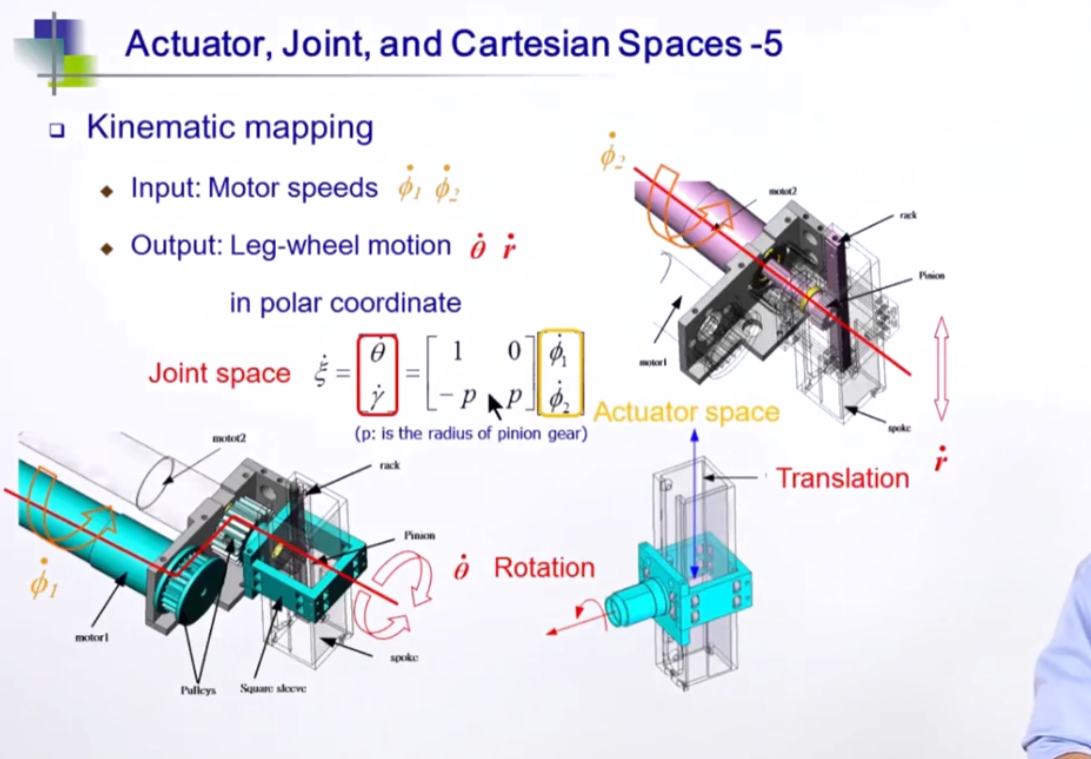
1. 运动学
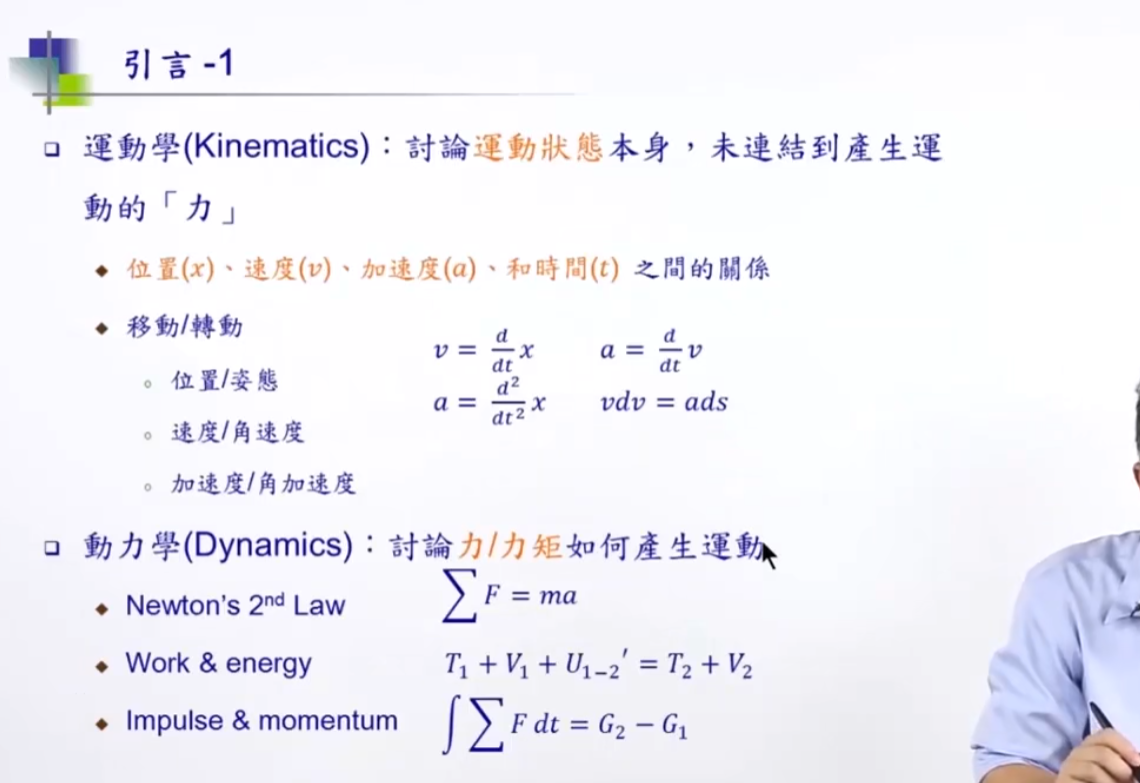
顺向运动学:由角度求终点
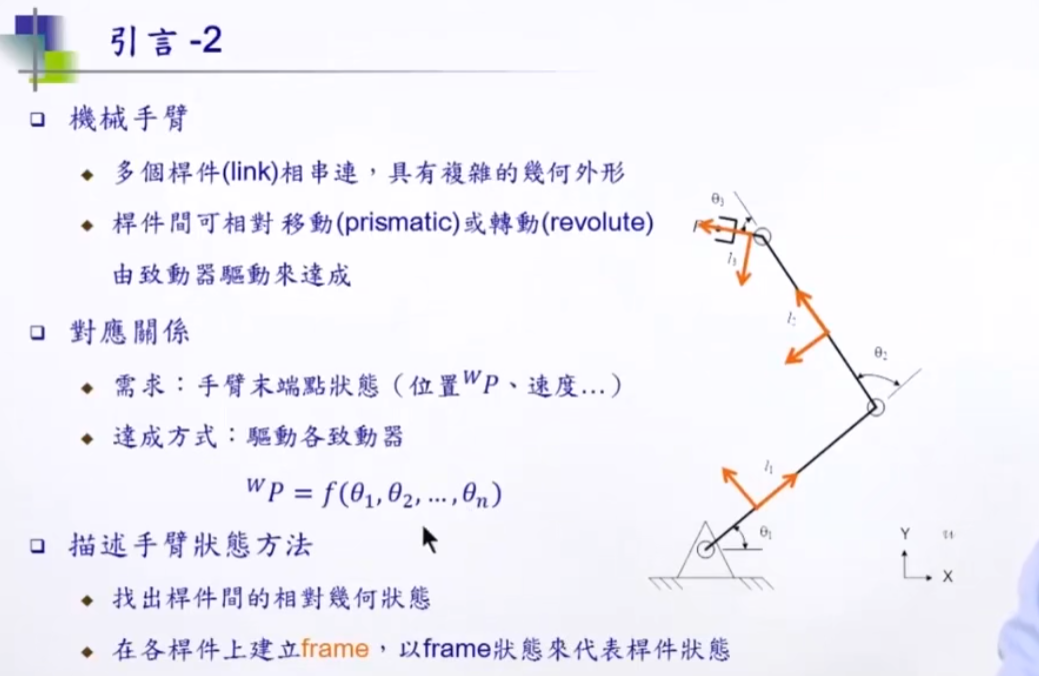
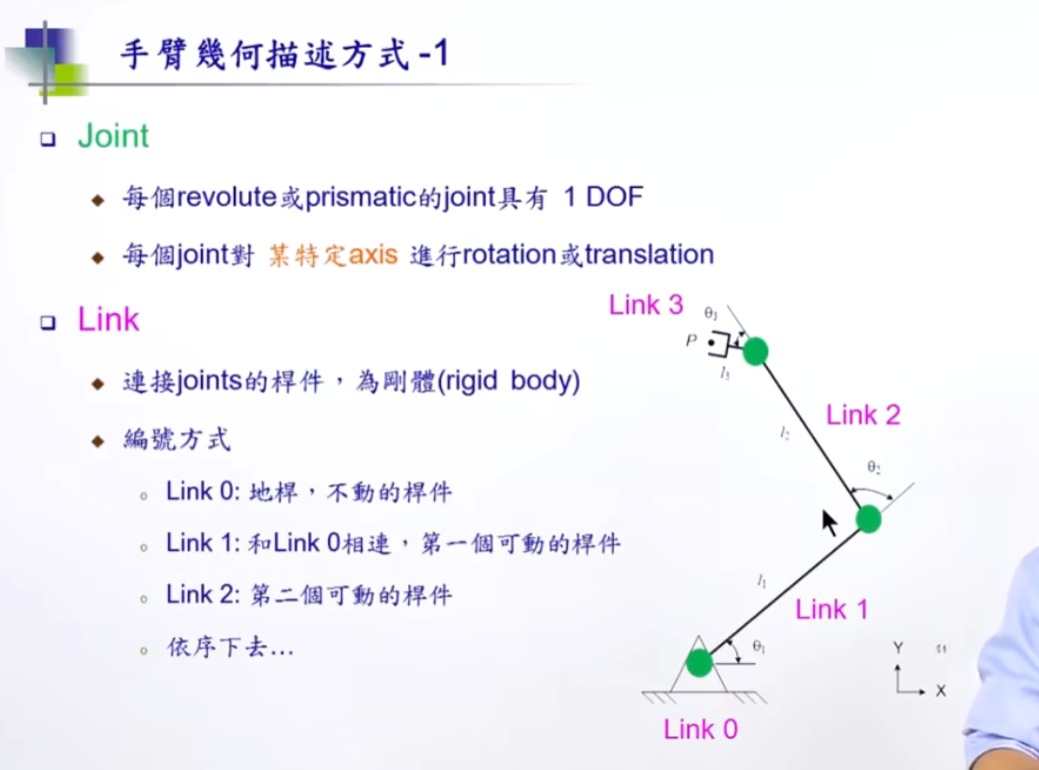
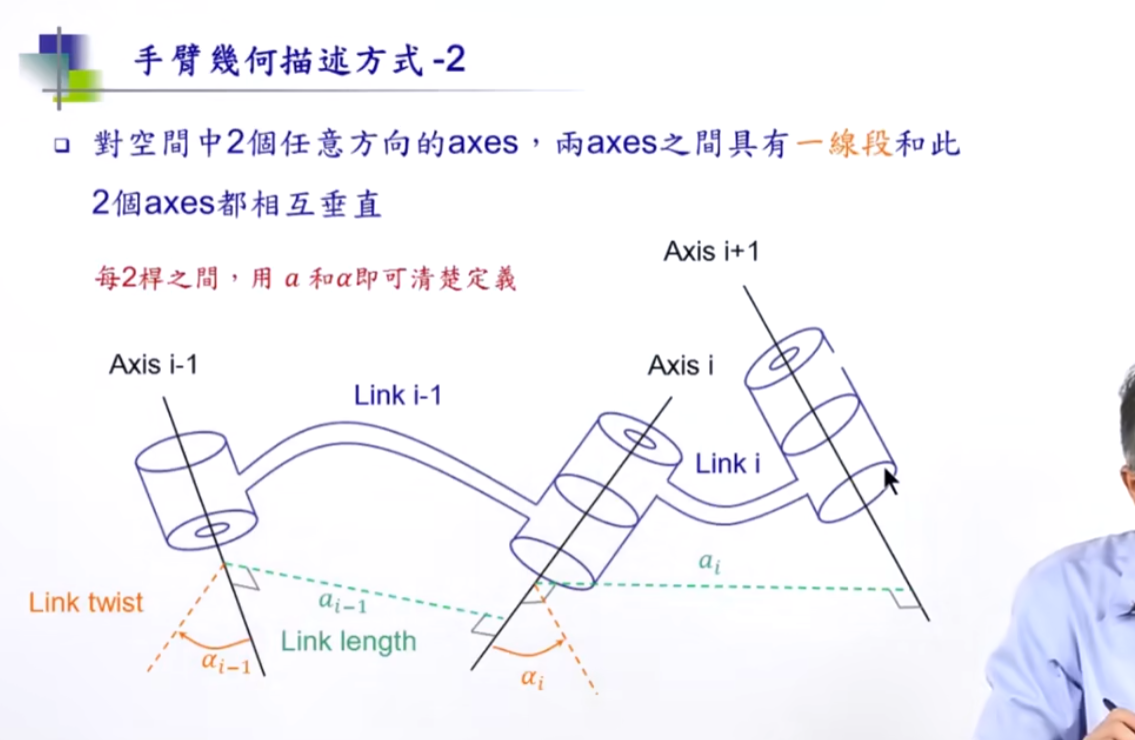
1.2 手臂几何描述
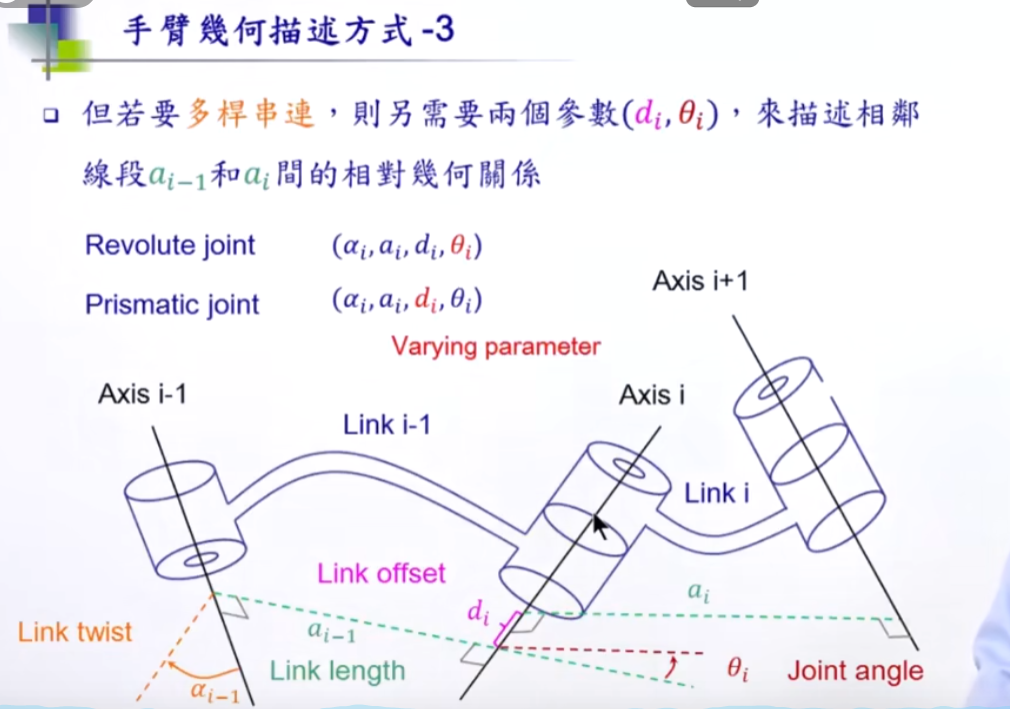
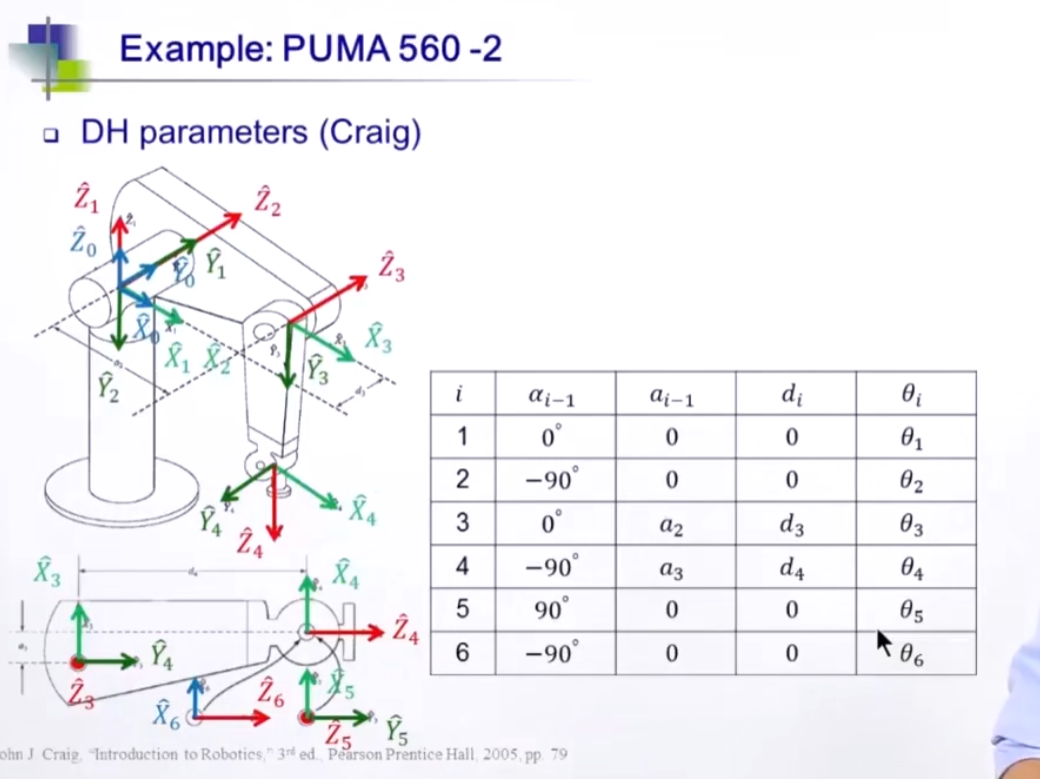
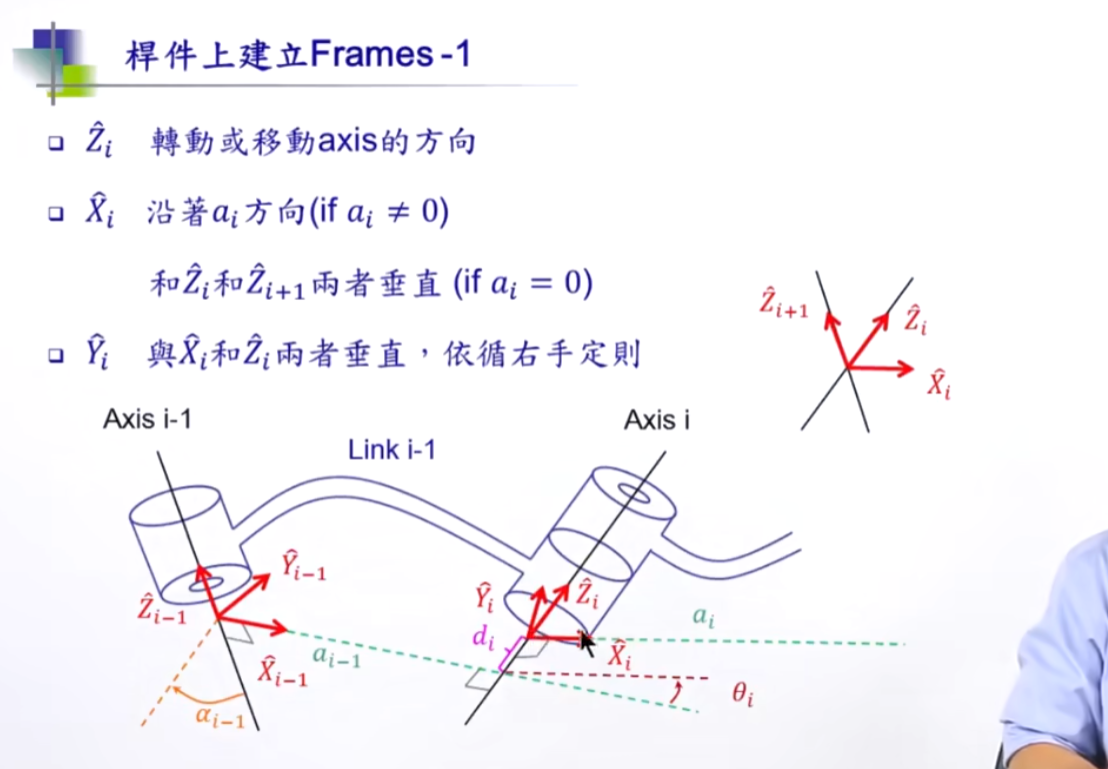
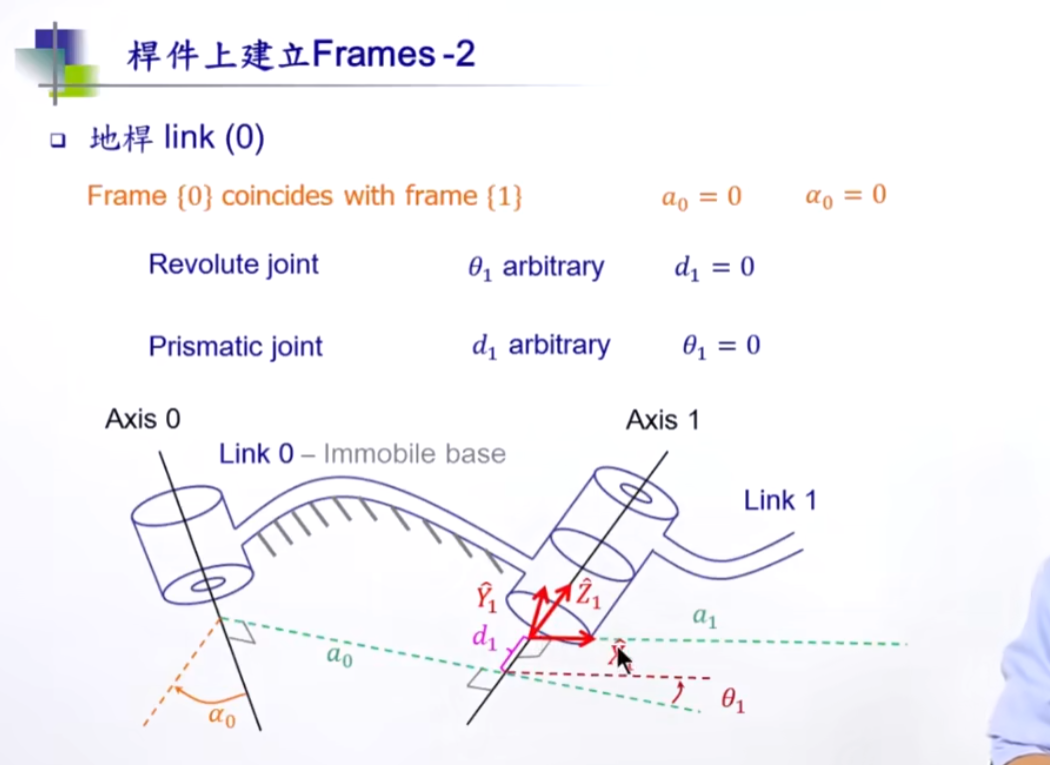
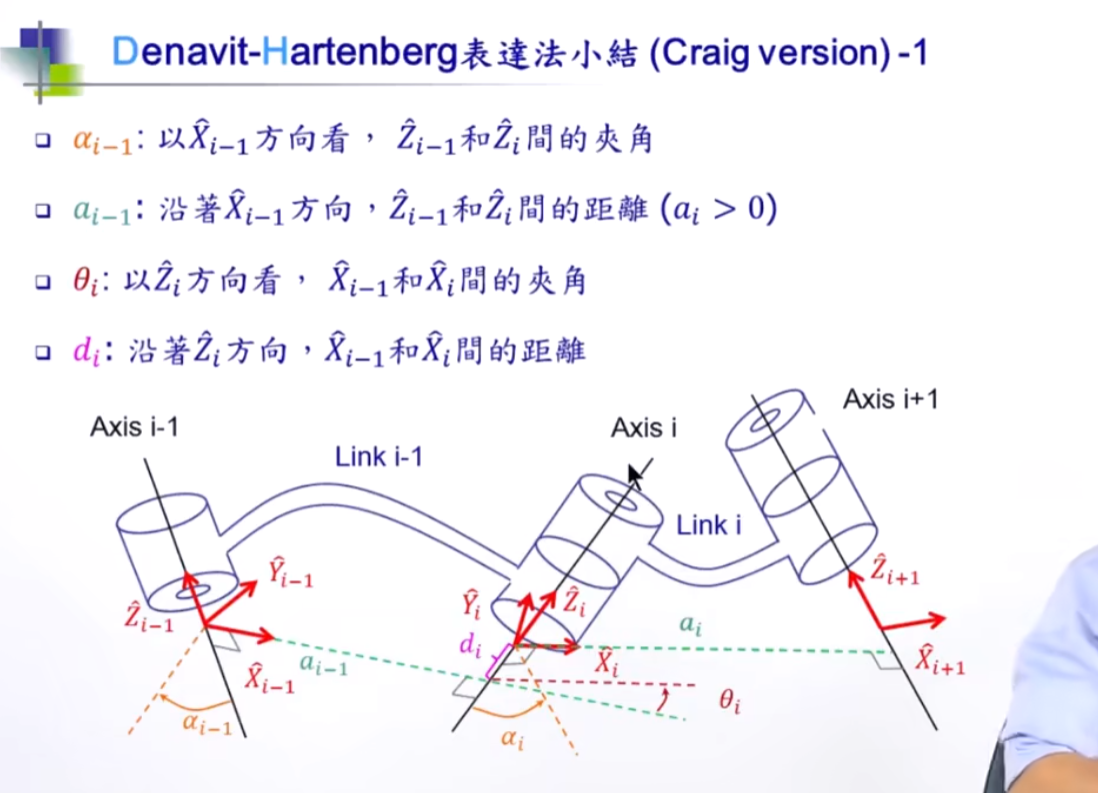
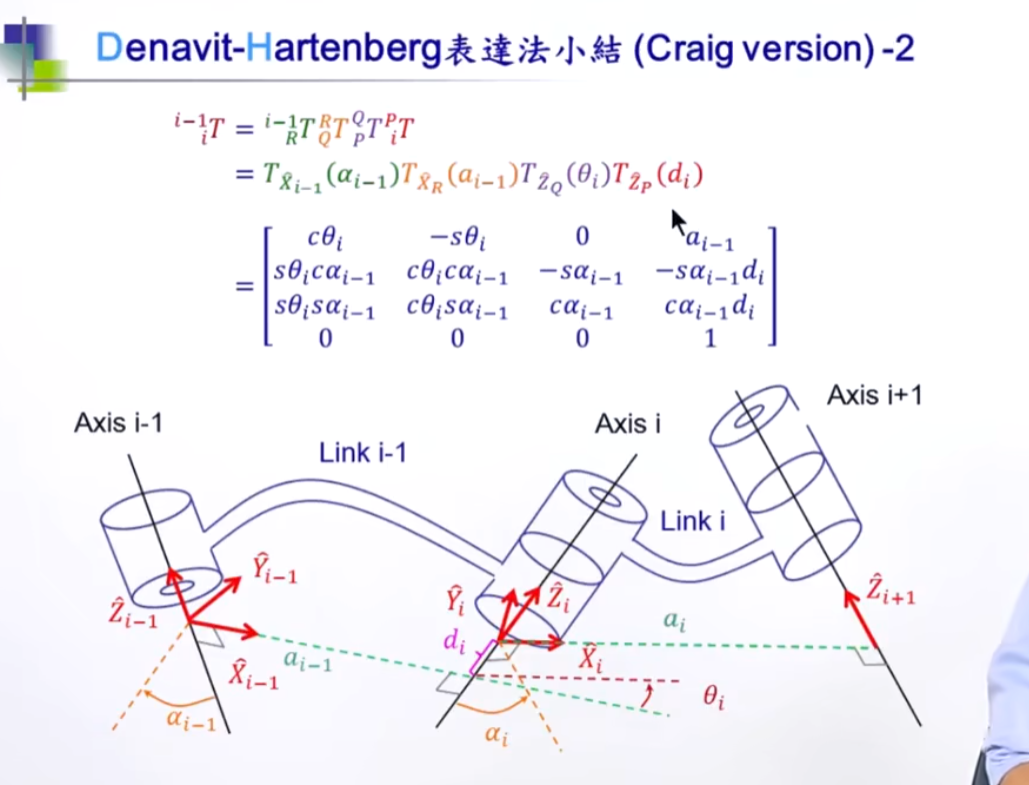
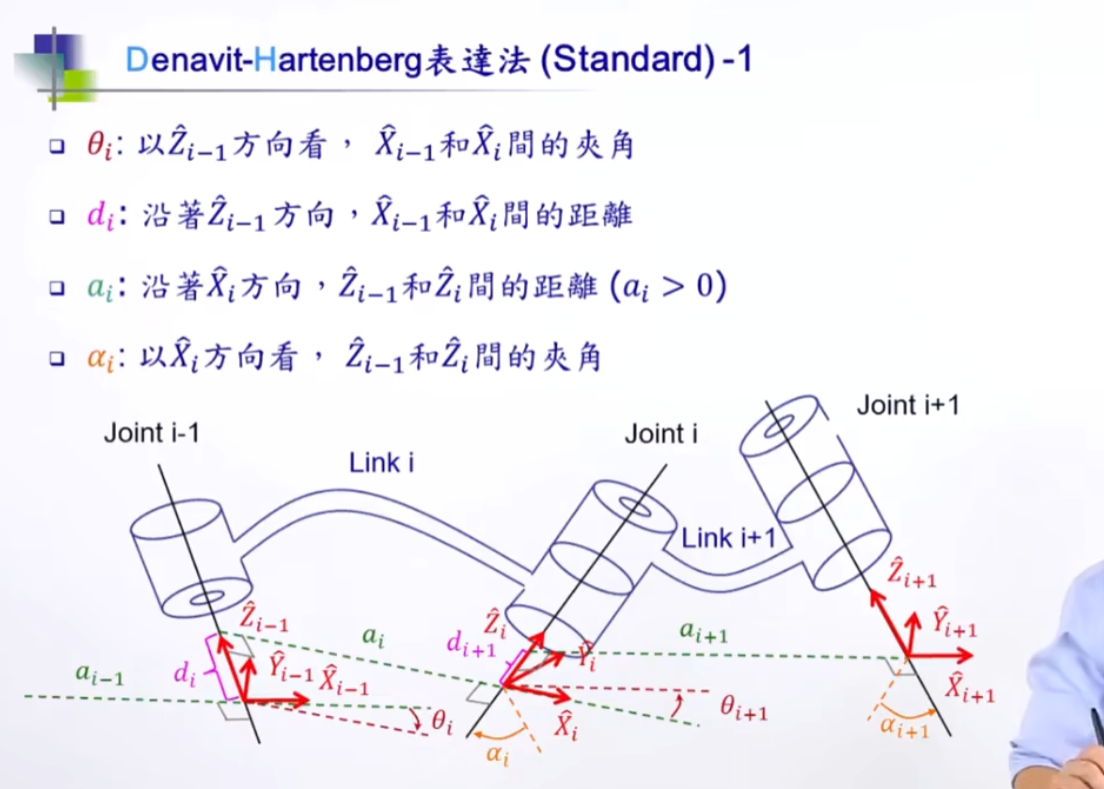
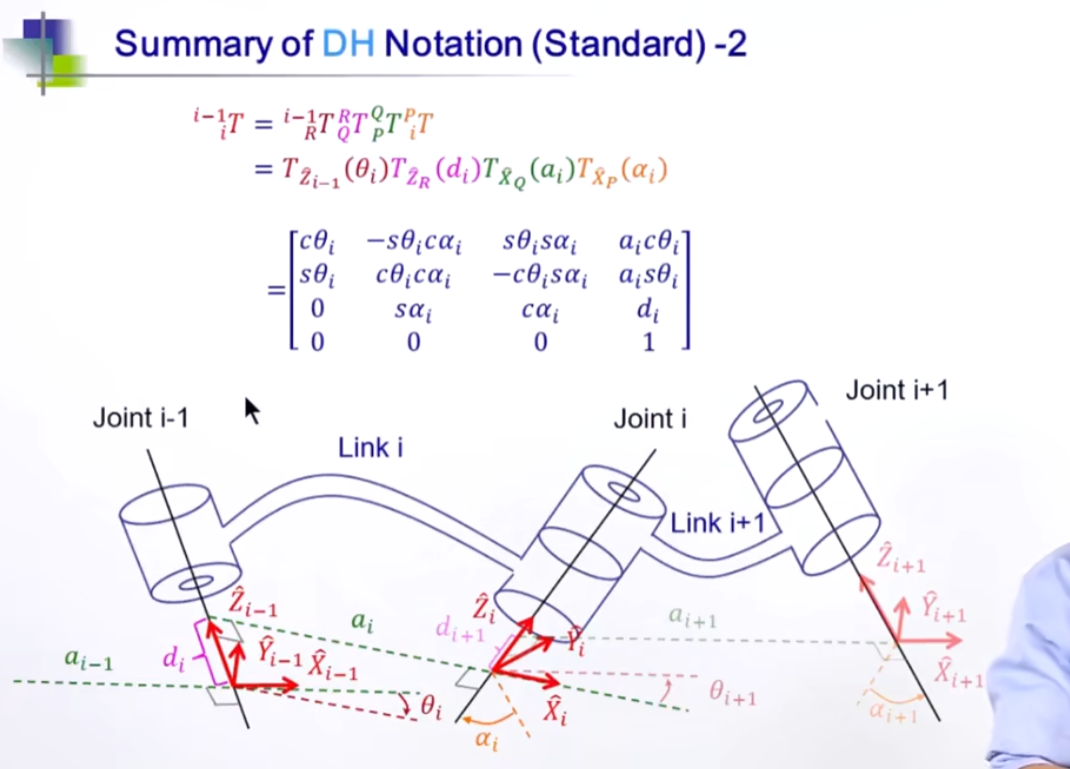
1.3 DH表示法
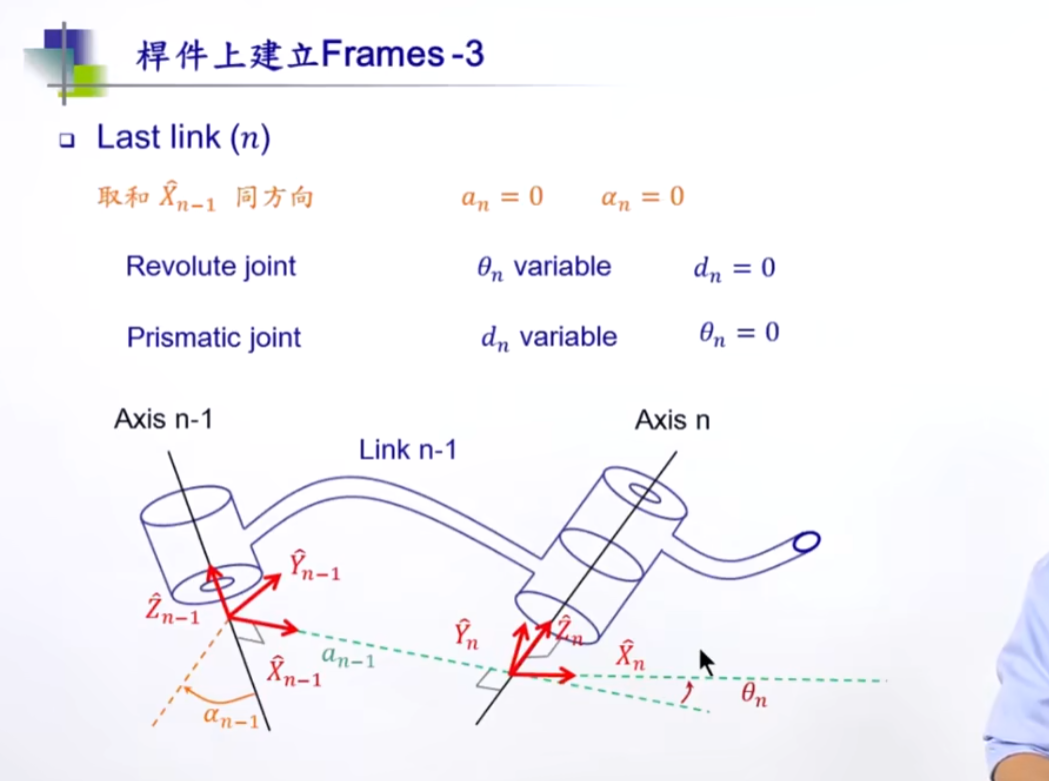
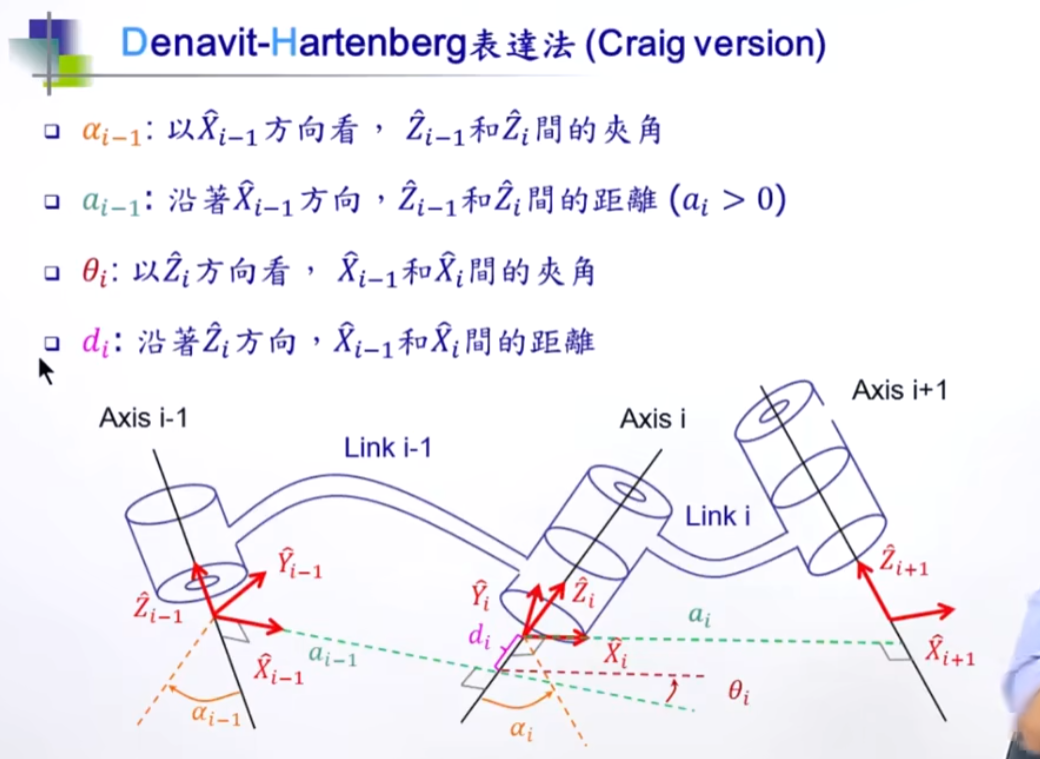
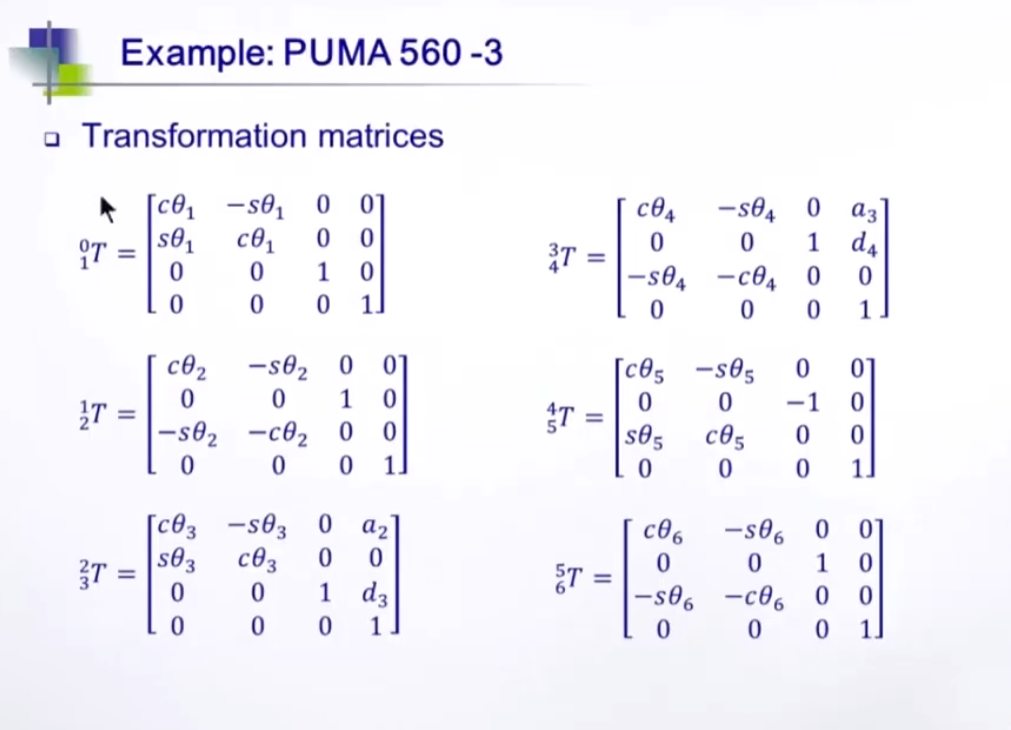
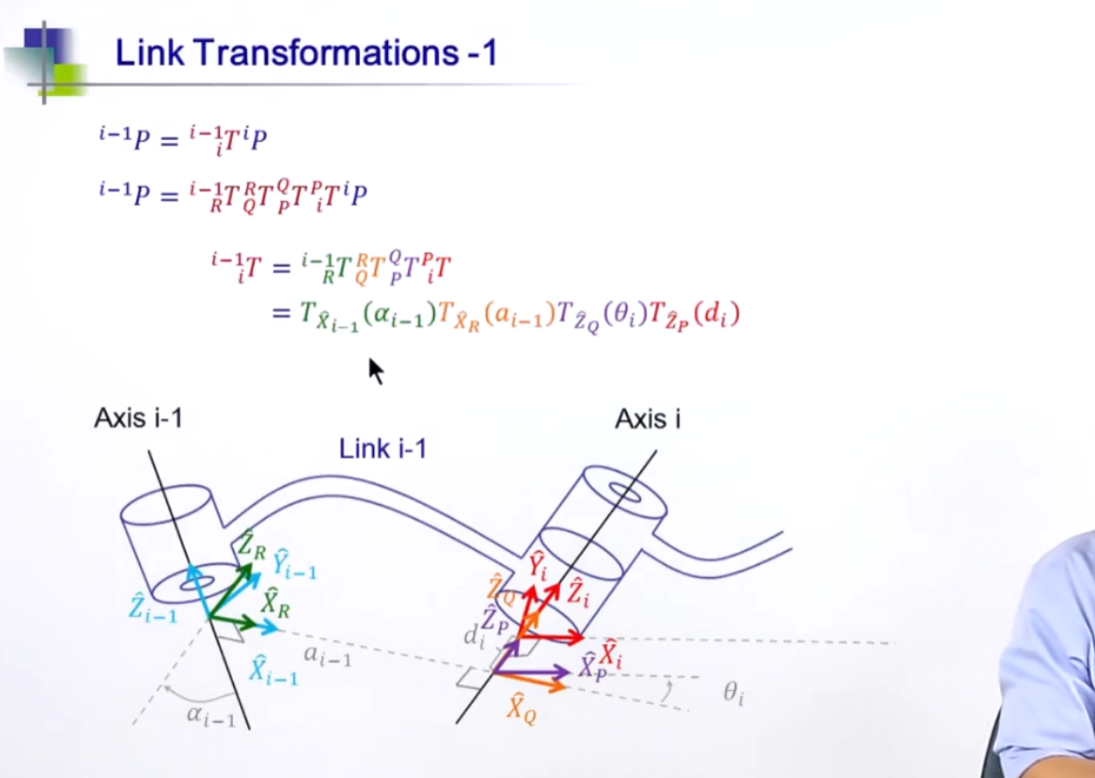
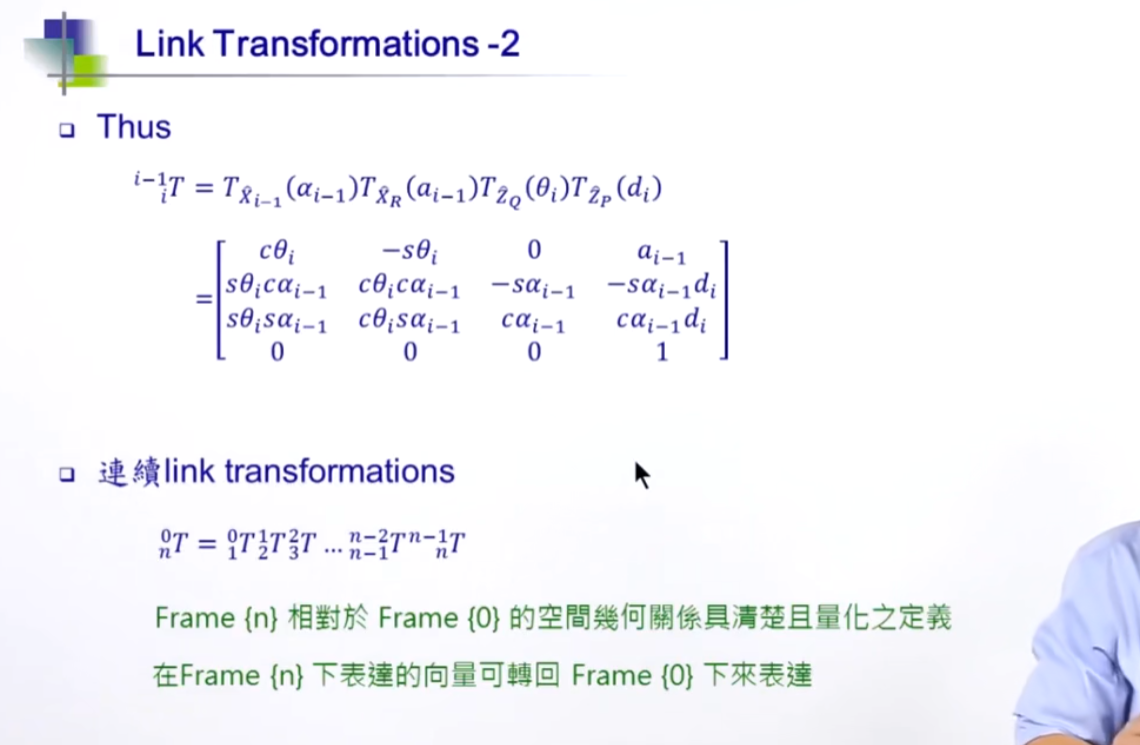
相邻转轴之间的坐标变换
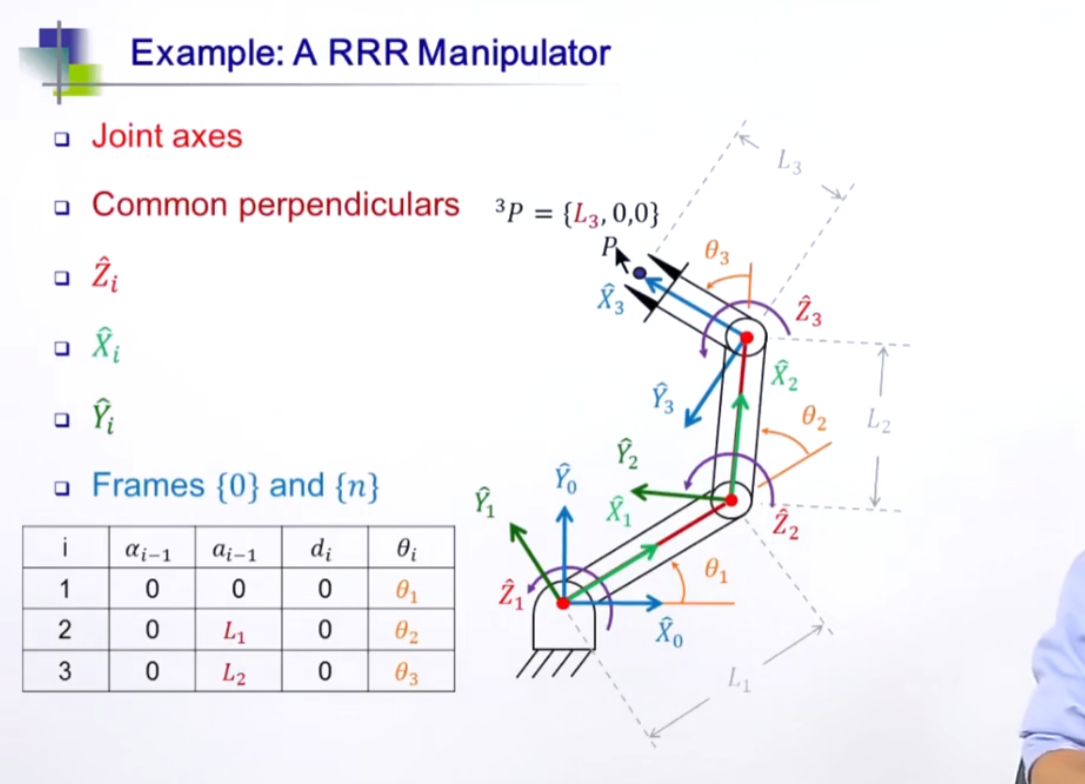
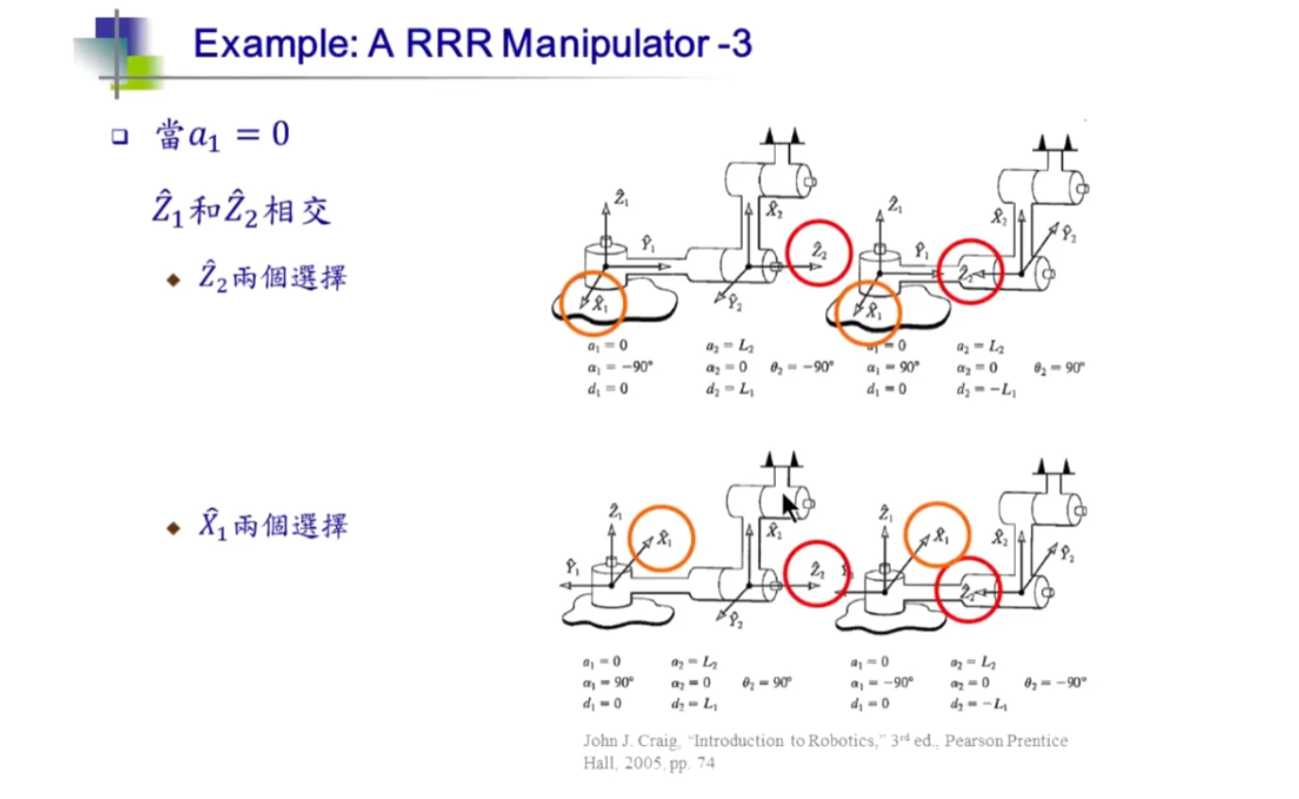
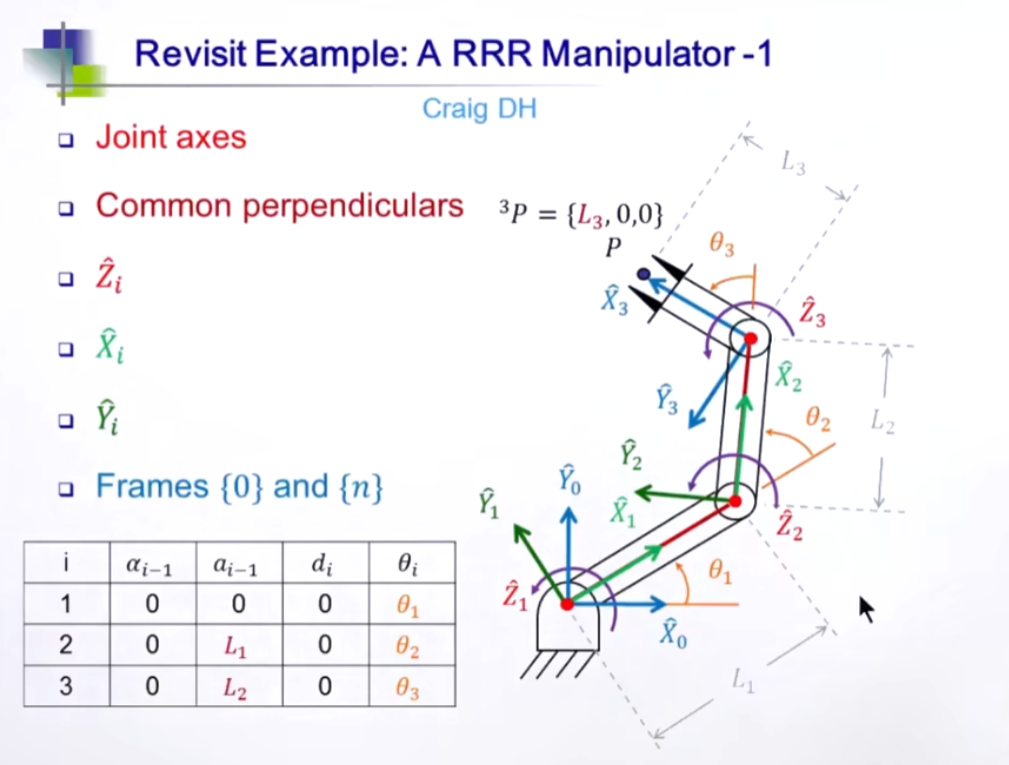
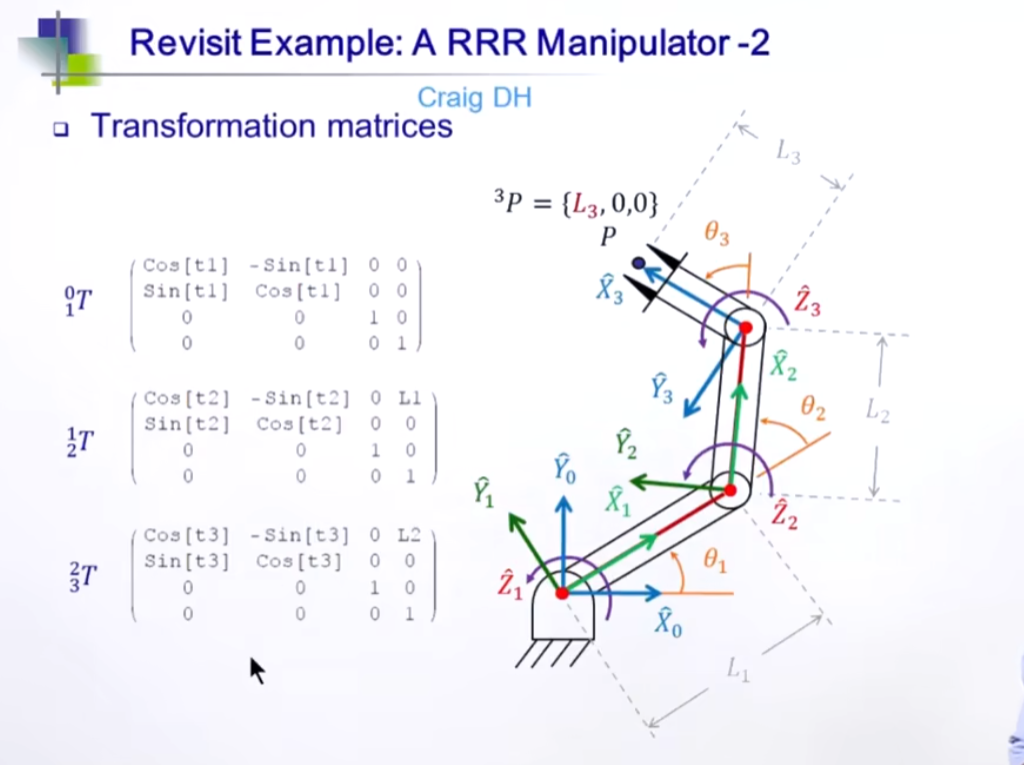
例题1
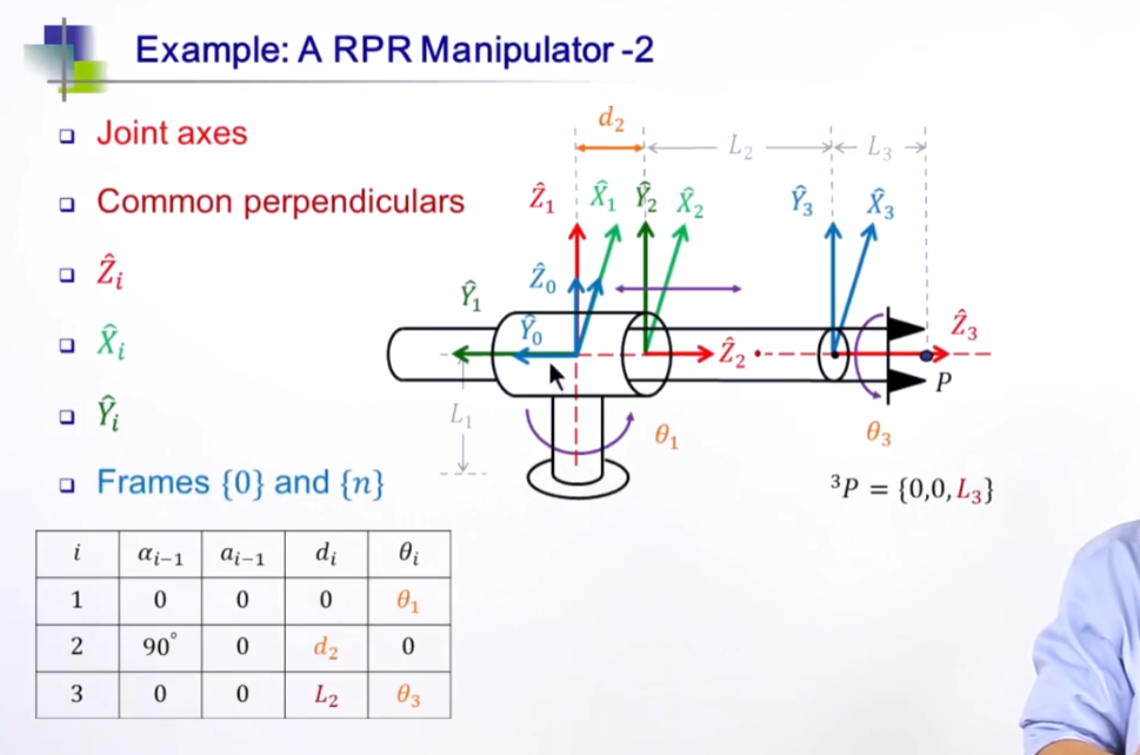
例题2
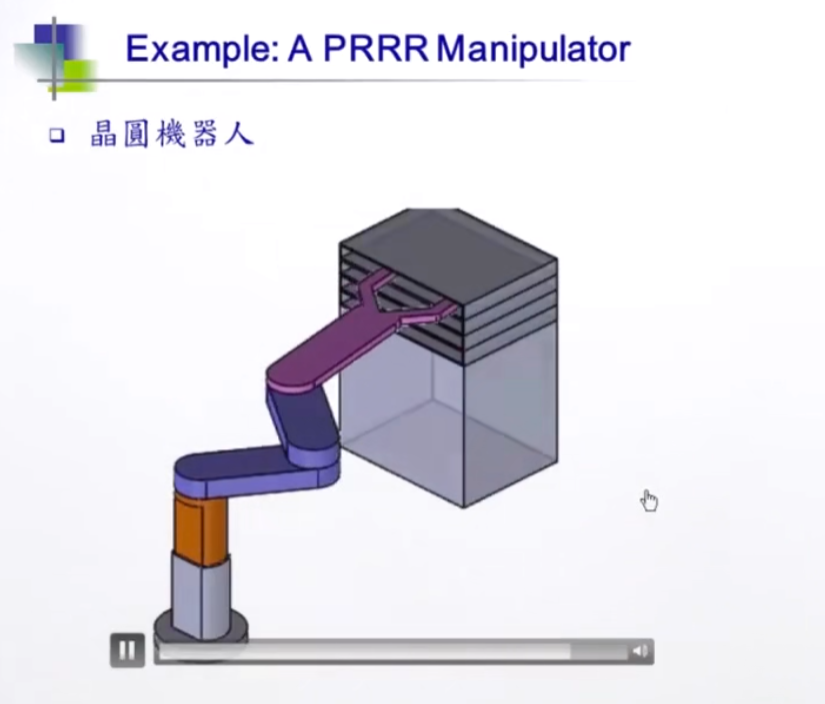
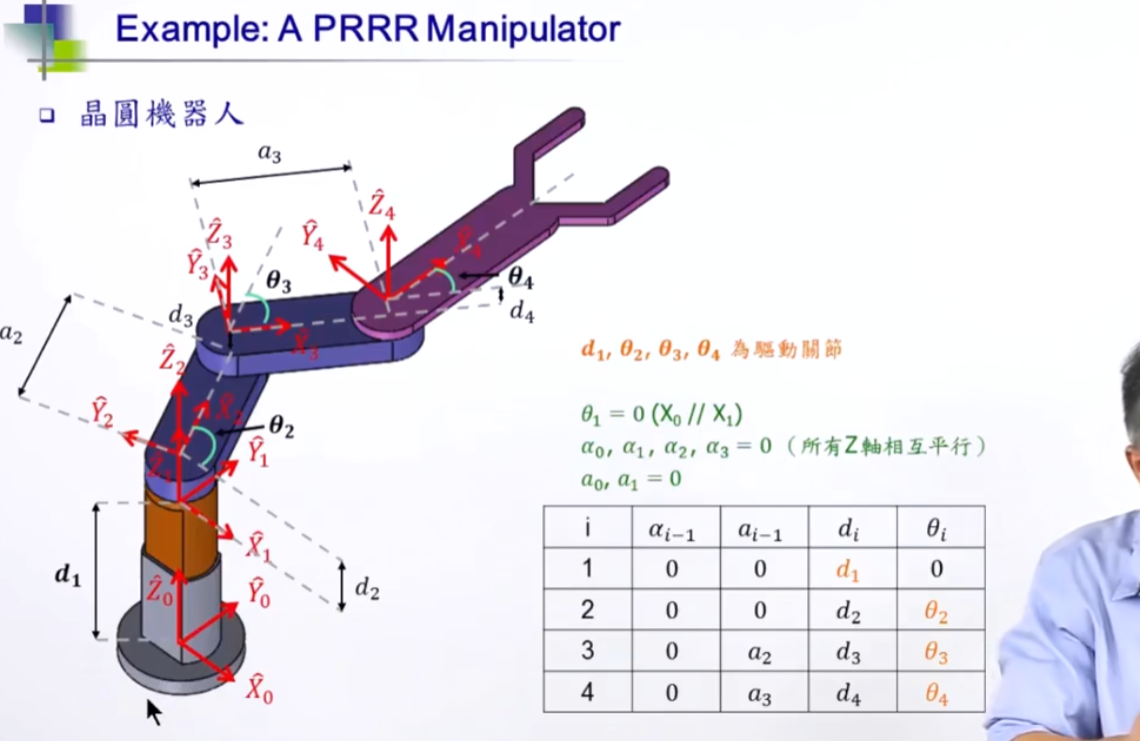
晶圆机器人
1.4 小结
两种表达法
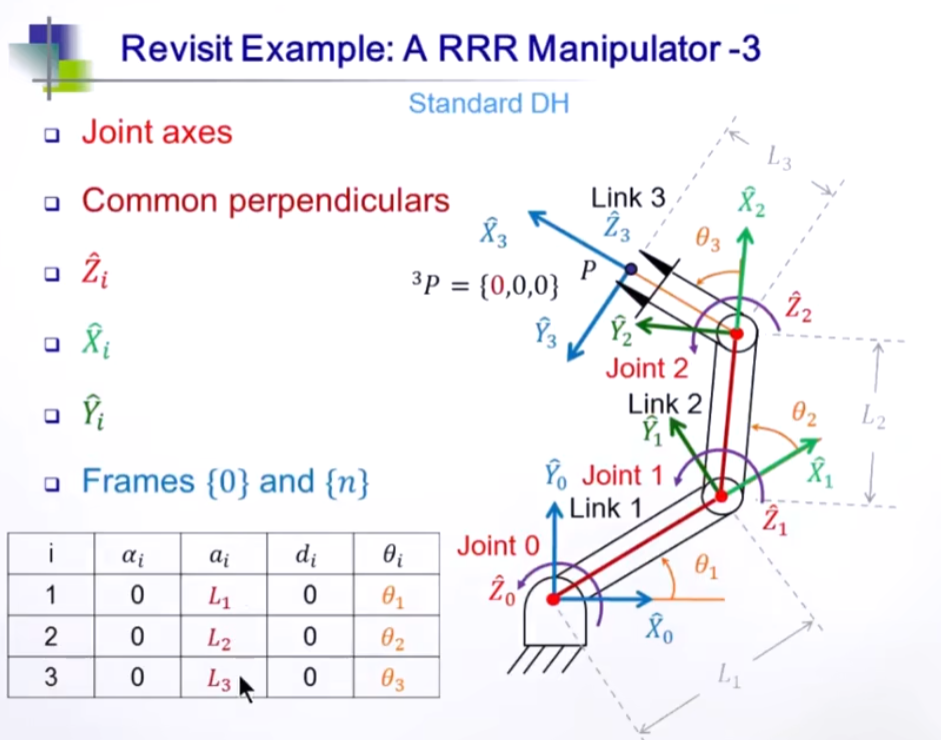
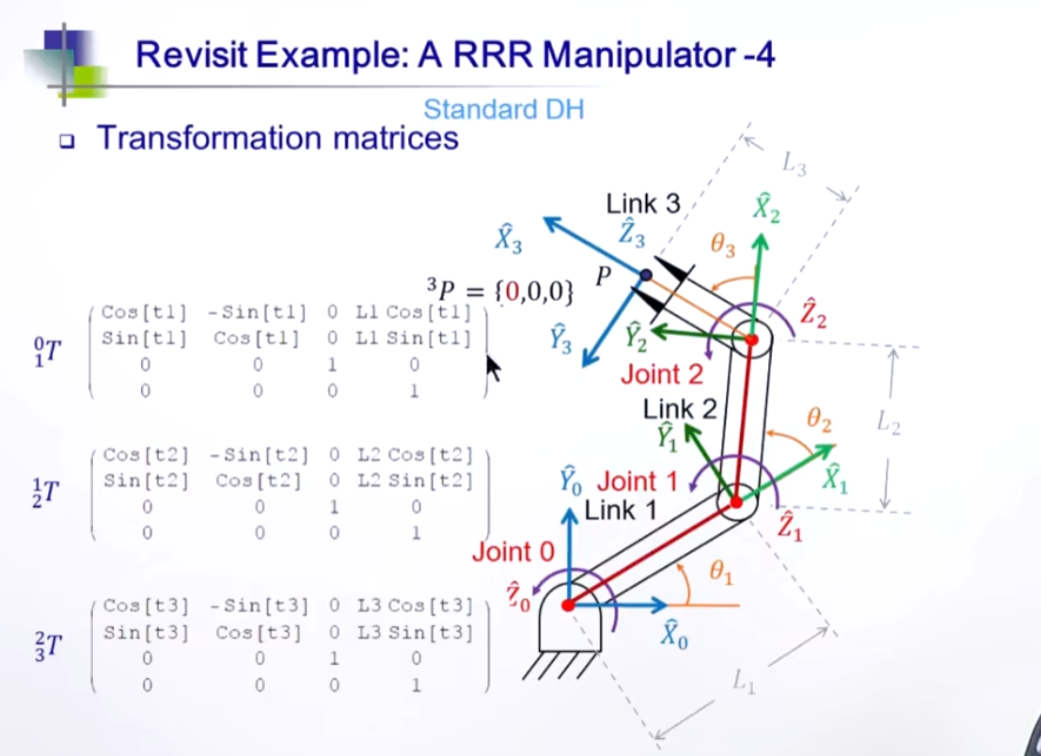
例题-两种方法
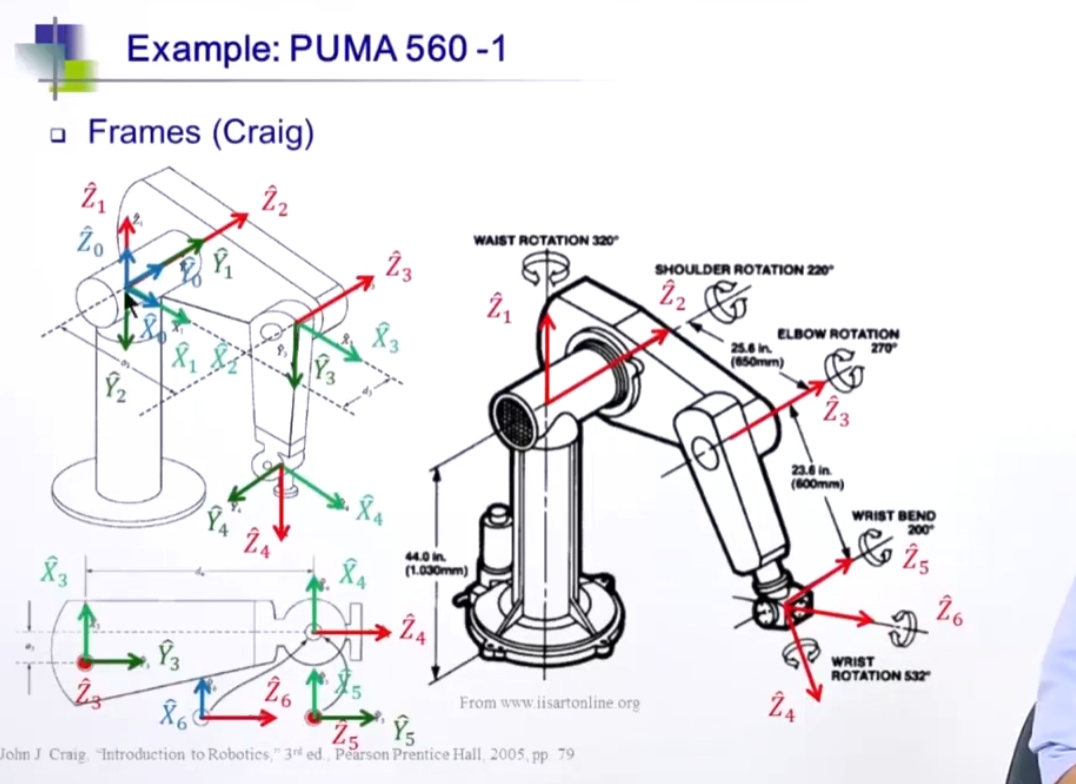
1.4.1 方法一:Craig DH
1.4.2 Standard DH
比较
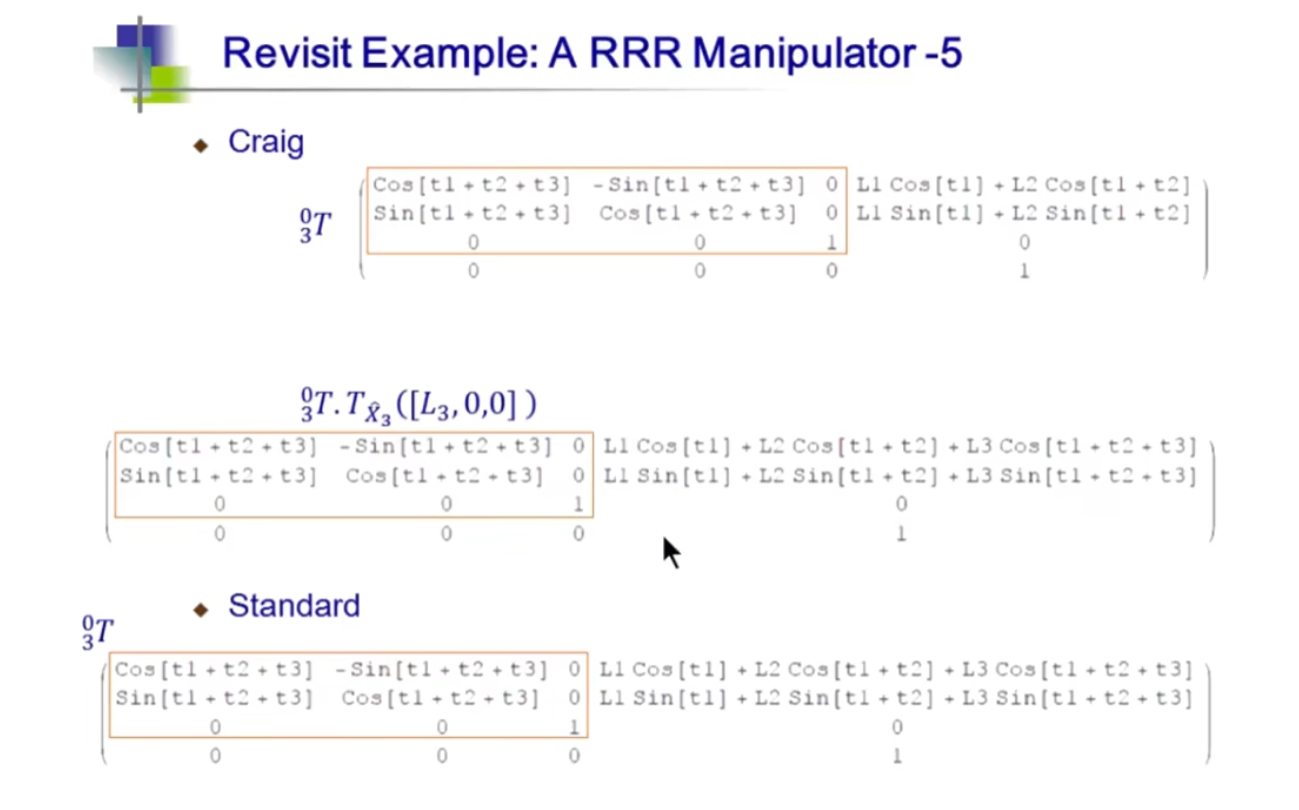
例题