第2章 智能巡线机器人总体方案设计
完整的机器人系统就是一个移动的测控系统,包括检测部分、控制部分以及相应的驱动部分。这几个部分是彼此相互关联的,检测部分根据机械结构选择合理的检测手段,驱动部分根据任务要求和机械结构设计相应的驱动电路,控制部分则需从机械结构、检测手段、驱动方法综合考虑。
2.1 机器人要素分析
智能巡线机器人装备包含以下几个要素:机械机构、动力与驱动单元、执行机构、传感测试单元以及信息处理与控制单元五个部分。
这五个基本组成要素可以与人体的五大要素进行对比,如图2-1所示。
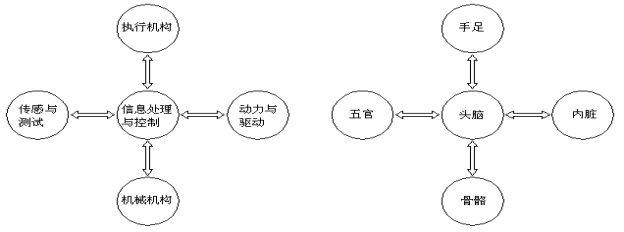
图2-1 机器人设备与人体五大要素比较图
机械机构的作用类似于人体的骨骼。包括工作模块以及装备所有功能元素的机械支持结构以及机身、框架、连接等。机械机构要在结构、材料、加工工艺性以及几何尺寸等方面可靠、小型、轻量、美观等要求。
传感与测试单元的作用相当于人体的五官,对装备本身和外界环境的各种参数及状态进行检测,并将其变换成可识别信号,传输到信息处理单元。它由各种类型的传感器和信号处理电路或测试仪表构成。传感器与测试单元的主要问题在于提高可靠性、灵敏度和精密度。而提高可靠性的关键在于提高抗干扰能力。传感器包括光电传感器(巡线和计数)、超声波传感器(检测是否到达目标和有无障碍物)。
执行机构相当于人体的手和足。它根据控制单元的指令,快速高精度地完成要求的动作。目前常用的执行机构是电磁式、液压式和气动式机构。此外,还有一些新型的执行机构如超声波驱动器、形状记忆合金驱动器等。执行机构需要根据机器人装备的匹配性要求,考虑改善性能,如何提高精度和快速性,减轻重量,实现组件化、标准化和系列化,提高系统整体的可靠性。
动力和驱动单元相当于人体的内脏或肌肉。它在控制单元作用下,提供动力驱动和各种执行机构完成要求的动作和功能。机器人装备一方面要求驱动的高效率和快速反应特性,同时要求对水、油、温度、尘埃等外部环境的适应性和可靠性。智能巡线机器人的动力单元包括步进和直流电机。
信息处理与控制单元相当于人体中的头脑。将来自传感器与测试单元的检测信息和外部输入命令进行集中、存贮、分析、加工,根据信息处理结果和预设的控制算法,发出相应的指令控制整个系统有目的地运行。一般由计算机、可编程控制器(PLC)和计算机外部设备等组成。机器人系统对控制和信息处理单元的基本要求是:提高信息处理速度,提高可靠性,增强抗干扰能力以及完善系统自我诊断功能,实现信息处理智能化和小型、轻量、标准化等。
2.2.3 控制系统框架设计
对于控制系统模块,光电传感器获取机器人位置姿态信息,超声波传感器判断是否到达目的地和前面是否有障碍物。机器人行走或做其它运动都需要电机将电能转化为机械能。
如图2-2所示,CPU根据传感器检测发送的信号,控制电机转动,便可调整机器人运动。由此构成了机器人测控系统。
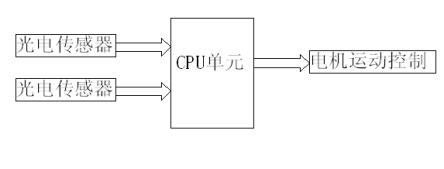
图2-2 控制系统框架图
第3章机械结构设计
机械部分是机器人运行的载体,设计性能良好的机械结构,将有利于简化机器人控制算法的设计,并且机构在执行过程中可以很好的实现控制精度。在这一章里,将分别论述了车轮配置方式、底盘和尺寸。
3.1 智能机器人的车轮驱动配置
机器人的运动方式有轮式、履带式和步行方式。轮式和履带式机器人适合于条件较好的路面,而步行机器人则适合条件较差的路面。为了适应各种路面的情况,可采用轮、腿、履带并用。在本节中主要讨论各种方式的车轮驱动配置类别的特点,并且根据本课题的需要选择恰当的驱动配置方式。
3.1.1 机器人常用车轮驱动配置介绍
1、独轮驱动配置方式
其原理上不仅可以在平地行走,也可以在不平整的地面和倾斜的地面上行走。车体的转弯可以利用伴随陀螺仪加速、减速的反力矩。由于其在稳定性方面的弊病,将独轮机构应用于机器人上面基本没有实用性。
2、两轮驱动配置方式
两轮驱动配置的简图如下图3-1所示:
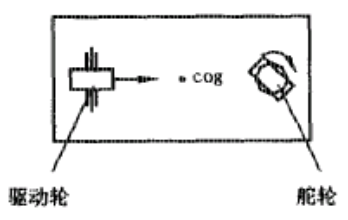
图3-1 两轮车简图
将自行车或摩托车用于机器人的试验很早就有人进行了。主要依靠手的操作和体重的移动力求稳定行走,这种陀螺两轮车,把车体倾斜成比例的力矩作用在轴系上,利用陀螺效果使车体稳定。但是这种结构的机器人的速度、倾斜等物理量检测、控制精度很难提高。另外在这种机器人上使用相对简单,可靠性高的传感器也很难,而且制动或者低速时的稳定性极难保证,所以目前的研究基本上提留在提高稳定性能力的试验上面。
3、三轮配置的驱动方式
从理论上讲,三点决定一个平面,因此轮式移动载体的平稳运动至少需要3个轮子支撑,所以3轮配置的驱动方式是轮式机器人的基本移动机构。三轮配置驱动主要方式如下图3-2所示:
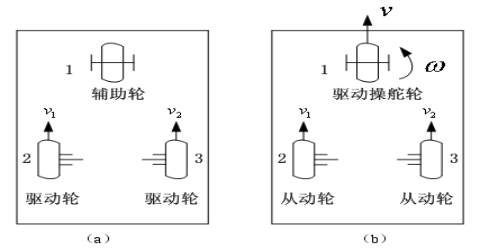
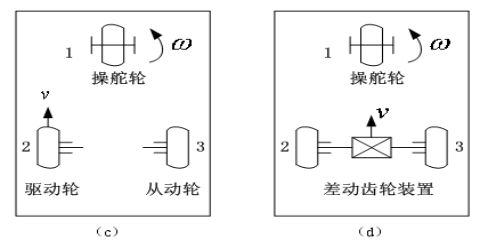
图3-2 三轮移动配置方式
第4章 传感器接口电路设计
机器人需要感知外界的环境和自身的状态信息,从而做出正确的判断并告知CPU获取相应的信息。针对要求选用的传感器类型有:超声波传感器、红外光电反射式传感器。红外光电传感器检测巡线轨迹,超声波传感器检测障碍物。
4.1机器人对巡线传感器的要求
机器人对巡线传感器的要求大致如下:
抗干扰性:不同的环境可能存在各种形式的强光干扰、电磁干扰、颜色干扰,必须有较好的抗干扰能力。
可调性:比赛场地上机器人的运行环境可能有别于当初调试的环境,可能出发位置、灯光光照角度、日光光照情况均会变化,必须留有调节各种参数的环节,使得传感器工作在最佳状态。
稳定性和快速性:一旦传感器移动到引导条带边缘,传感器应当及时、快速、稳定地触发,不允许有状态的抖动,否则会引起机器人的摇晃。
成本低廉:对于机器人通用性来说,价格是一个重要的因素。尽管市售产品中有性能良好的光电传感器,但是一般还是以自己开发制作为宜。
4.2 超声波传感器
4.2.1超声波传感器的原理
在相扑机器人之类的格斗型机器人中超声波传感器是经常采用的传感器之一,用来检测对方的机器人的有无和距离。本次用到超声波传感器的目的是为了检测是否有障碍物和有没有到达目的地。其原理有如蝙蝠,它的嘴发出超声波,当超声波遇到小昆虫的时候,蝙蝠的耳朵能够接受和反射回波,从而判断饵食的位置和距离并给与捕杀。超声波传感器的工作方式是通过发送器(相当于蝙蝠的嘴)发射出来的超声波被物体反射后传到接收器(相当于蝙蝠的耳朵)接受来判断是否检测到物体。
超声波传感器的实物照片如图4-1:

图4-1 超声波传感器的实物
具体到超声波传感器的结构,一般它的内部都有一个振子,所谓振子是一块金属片上贴着压电陶瓷,通过给压电陶瓷加上电压,它就会根据电压的大小产生相应的机械变形,进而产生机械振动,这就是所谓的压电现象。超声波传感器就是利用这中原理实现超声波的发射与接收的。
如图4-2和图4-3所示: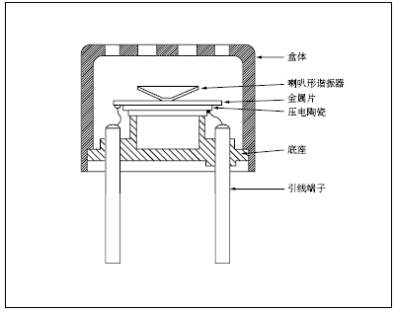
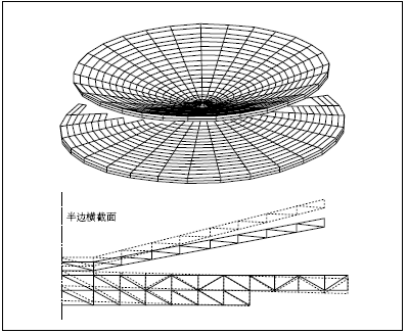
超声波传感器也有透过式和反射式之分。超声波传感器不但可以检测到物体,还可以通过发射器的回波返回接收器所需要的时间来测量距离。
第5章 电机驱动电路设计
驱动部分是机器人运动的源动力,控制着机器人的运动方向和速度。设计性能稳定、快速响应CPU信号的电机驱动电路是机器人运动精度的重要保证。
5.1.1电机减速器的选择
这里选用上海朗能机电设备有限公司生产的ZYT60-JB80永磁直流电机。其主要技术参数是:
Unom=24V; Inom=4.8A ; nnom=2500r/min;Pnom=90W,Gnom =1:5~1:230。
具体的实物形状如下图所示


图5-1 机器人巡线驱动用的直流电机及减速器
直流电机的低速性能是偏软的,为使电机工作在稳态下,必须根据巡线机器人的实际运行需要,选择合适的减速器。另外电机的转速比较高,对于巡线机器人来说,容易在转弯的时候因惯性而循迹失败,所以它的速度在6km/小时左右就可以满足要求。
第6章智能巡线机器人姿态调整方法
为了使机器人的巡线更加准确,针对特定场地的情况下,采用适合机器人自身机械特性的算法让机器人实现准确行走定位是关键。
下面,首先根据机器人的机械特性,分析了通过直流电机的起或停控制机器人调整的可能性,然后把传感器监测到的机器人底盘与引导线的相对位置划分为典型的7种状态,做出相应调整方法。最后改进了这种一动一停的校正方法,提出了一个新方法,用PWM控制左右电机的转速产生速度差,由于左右驱动轮的速度差值小了,因此可使机器人在调整过程中减轻晃动,并使行走加快。
6.1 总体分析
根据机器人的机械特征,分析了通过直流电机的起或停控制机器人调整的可能性,然后把传感器检测到的机器人底盘与引导线的相对位置划分为典型的7种状态,做出相应的调整策略。改进了一停一动的校正方法,提出了一个新方法,用PWM控制左右电机的转速产生速度差(图6-1),由于左右驱动轮的速度差值小了,因此可使机器人在调整的过程中减轻晃动,并使行走加快。
机器人底盘长700 mm,宽850 mm。如图6-2所示,后排左右轮是两个独立的由直流电机驱动的轮子,前排放置两个万向轮。直流电机空载力矩大,可以很好地控制所驱动的轮子起或停,万向轮在任何方向都可以实现运动,因此整个机器人的行走方向是依靠后排两个驱动轮的起动或者停止来改变的。
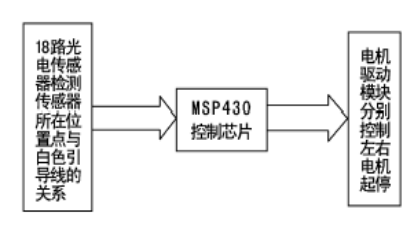
图6-1 巡线原理图
第7章 主控系统的设计
主控系统负责信息处理和控制外部电路,相当于人体中的头脑。将来自传感器与测试单元的检测信息和外部输入命令进行集中、存贮、分析、加工,根据信息处理结果和预设的控制算法,发出相应的指令控制整个系统有目的地运行。
本章中将为该主控系统选择一款简洁、廉价、易于开发的芯片MSP430F449,并在该芯片上实现机器人的相应算法。
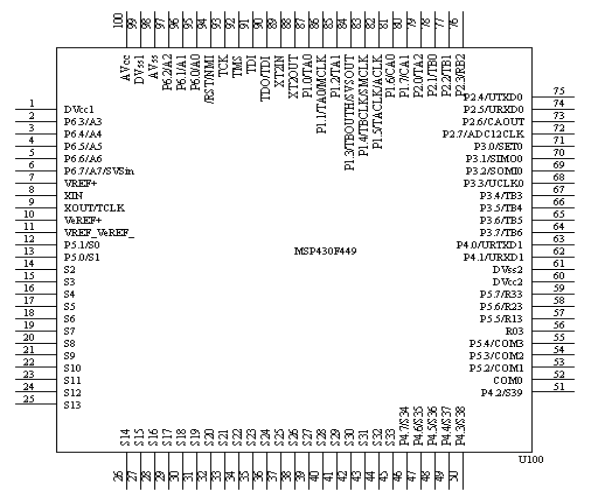
7.1.3 MSP430F449的引脚
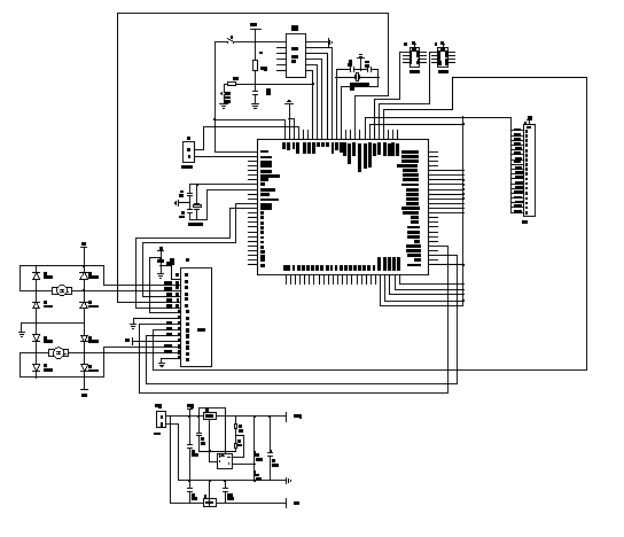
MSP430F44X系列器件的封装形式为100引脚的PLASTIC 100-PIN QFP,其引脚如图7-1所示。
7.2 主控单元电路设计