1. SITL软件在环开发环境搭建
安装ros2:参考小鱼的一键安装
安装px4、QGC、DDS:参考: PX4 自动驾驶仪用户指南 | PX4 Guide (main)
最新PX4xROS2保姆级仿真部署教程来了!_ros2 px4-CSDN博客
1.1 问题一:gazebo sim仿真没有模型
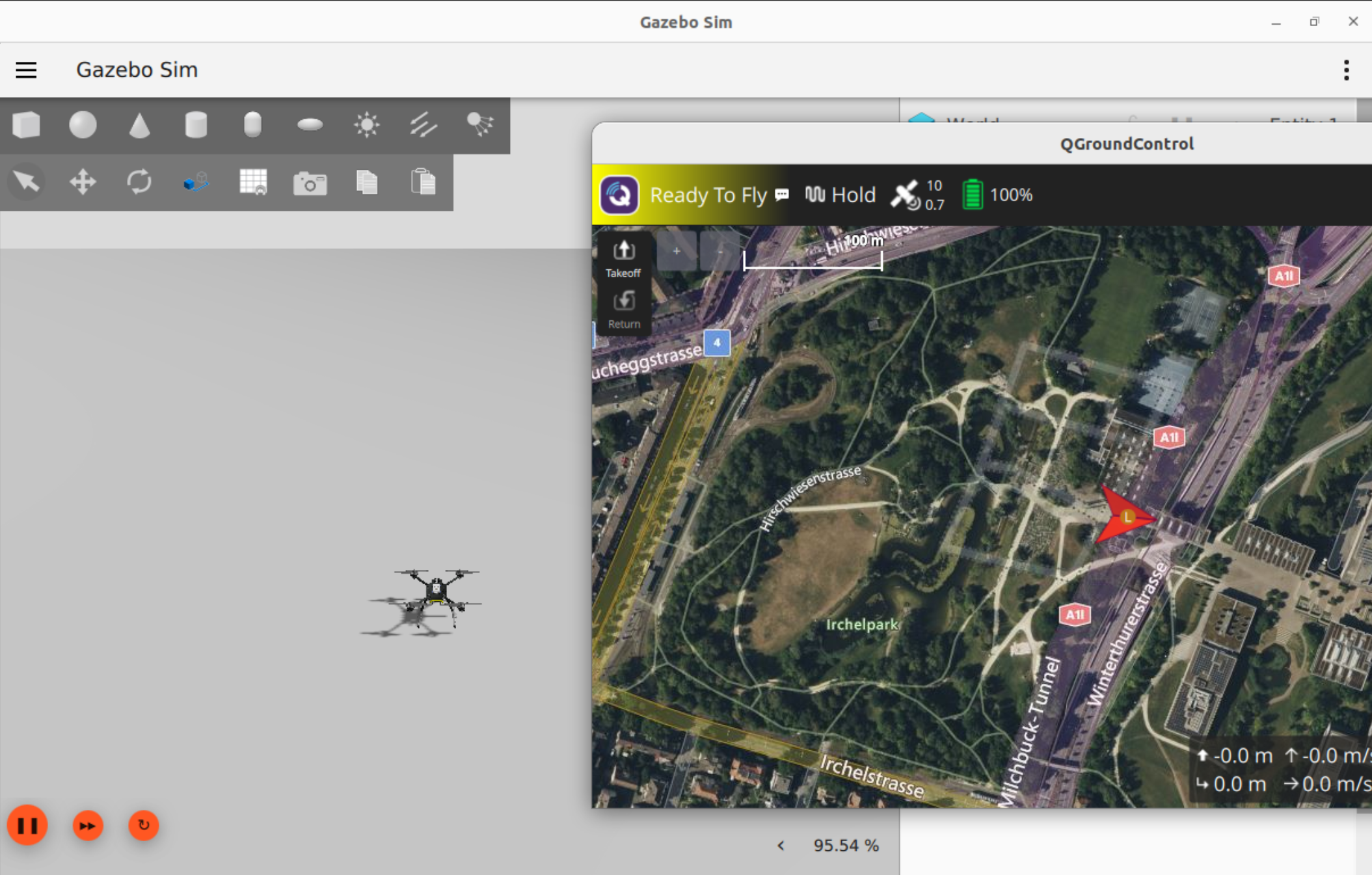
描述:执行如下命令后: make px4_sitl gz_x500 ,默认打开gazebo sim(版本8.10),但是打开以后并没有模型 ,大模型说是要移近模型/启动仿真时强制启用渲染组件等,最后定位到是渲染依赖的opengl这个库过低,安装以后就可以成功看到无人机了。
1.2 问题二:QGC安装命令补全和下载链接失效
使用如下命令:
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
//modemmanager :虚拟机一般不需要连接移动宽带调制解调器,该服务属于冗余进程;
// 部分嵌入式 / 机器人开发场景(如 ROS/ROS2 + Gazebo)中,ModemManager 可能会占用串口、USB 端口,或与设备驱动产生冲突;
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libfuse2 -y
sudo apt install libxcb-xinerama0 libxkbcommon-x11-0 libxcb-cursor-dev -y参考官网下载安装脚本: Download and Install | QGC Guide
安装并启动仿真:
chmod +x ./QGroundControl-x86_64.AppImage
// 启动QGC
./QGroundControl-x86_64.AppImage (or double click)
// 启动px4仿真
cd PX4-Autopilot
make px4_sitl gz_x500