最近,星空计划(Nebula NEXT)连续发布了三项底盘核心技术:
EMAD 电磁全主动悬架、CIC 14 自由度非线性控制架构以及EMB 智能制动系统。
如果放在一起看,你会发现它们并不是"三项配置",而是一次系统级的底盘重构。
悬架:不再被动"响应",而是主动"决策"
传统悬架的本质,是"路面给什么,车再去消化什么"。
而 EMAD 电磁全主动悬架的逻辑是凭借微米级的运动控制算法,主动将颠簸化解。将"感知、决策、执行"融为一体。
-
响应速度提升 10 倍
-
能耗降低超50%
-
四轮可进行微米级独立控制
这意味着,车身不再只是被动过滤震动,而是实时重构车辆姿态**。

底盘:进化不止是换硬件
真正的变化,发生在控制架构上。
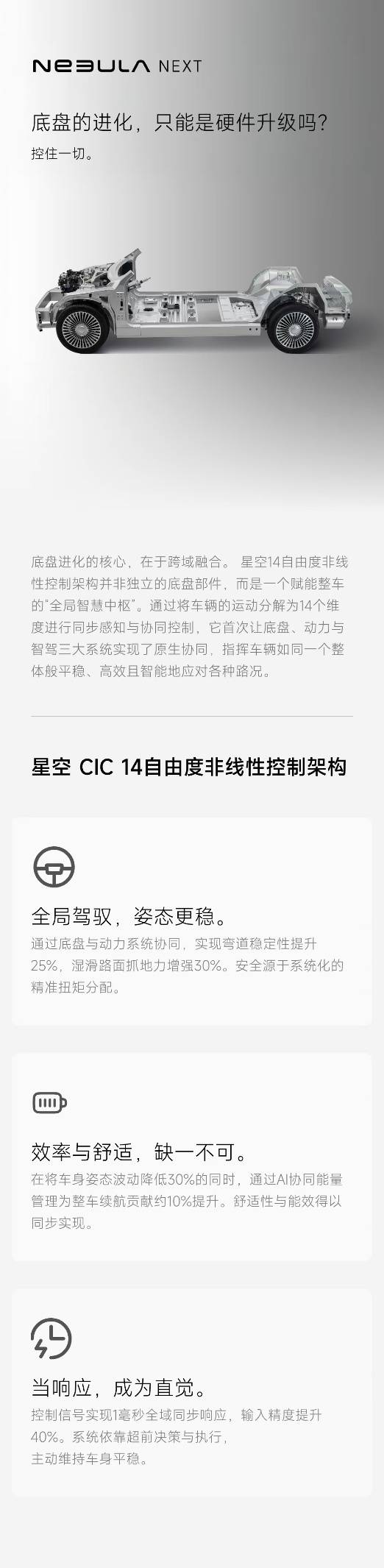
CIC 14 自由度非线性控制,将底盘、动力与智驾放在同一个控制体系里:
-
弯道稳定性提25%,湿滑路面抓地力提30%
-
姿态波动降低 30%,通过AI协同能量管理为整车续航提升10%
-
控制信号实现1毫秒全域同步响应,输入精度提升40%
这已经不是"某一项性能提升",而是整车行为逻辑的改变。
制动:比你更早一步
EMB 智能制动系统,或许是最容易被忽视、但最关键的一环。通过电机控制与智能算法的深度融合:
-
制动响应缩短至80ms 以内
-
精度达到0.1 MPa 级
-
一体化设计释放20% 空间
当制动从"踏板触发"变成"系统主动介入",安全的定义也被重新写了一遍。

写在最后
当悬架、底盘、制动都不再是孤立模块,
"好开"这件事,第一次成为一套可以被工程化、被计算、被持续进化的系统能力。
这,才是智能汽车真正该走的路。