数据集格式:labelme格式(不包含mask文件,仅包含jpg图片及对应的json文件)
图片数量(jpg文件个数):2777
标注数量(json文件个数):2777
标注类别数:12
标注类别名称:"河道内植被", "河道", "建筑", "天然排水沟", "人工排水沟", "坑洞", "岩石", "垃圾", "淤泥", "桥梁", "涵洞", "障碍物"
每个类别标注的框数:
河道内植被 框数 = 1983
河道 框数 = 3333
建筑 框数 = 5928
天然排水沟 框数 = 307
人工排水沟 框数 = 34
坑洞 框数 = 558
岩石 框数 = 364
垃圾 框数 = 288
淤泥 框数 = 596
桥梁 框数 = 325
涵洞 框数 = 50
障碍物 框数 = 49
总框数:13815
使用标注工具:labelme=5.5.0
所在github仓库:firc-dataset
图片分辨率:640x640
无人机:DJI MAVIC 3
采集高度:100m
采集角度:90°
标注规则:对类别绘制多边形框(polygon)
重要说明:可使用labelme打开并编辑数据集,json数据集需自行转换为mask、yolo或coco格式以用于语义分割或实例分割
特别声明:本数据集不对使用其训练的模型或权重文件的精度作任何保证
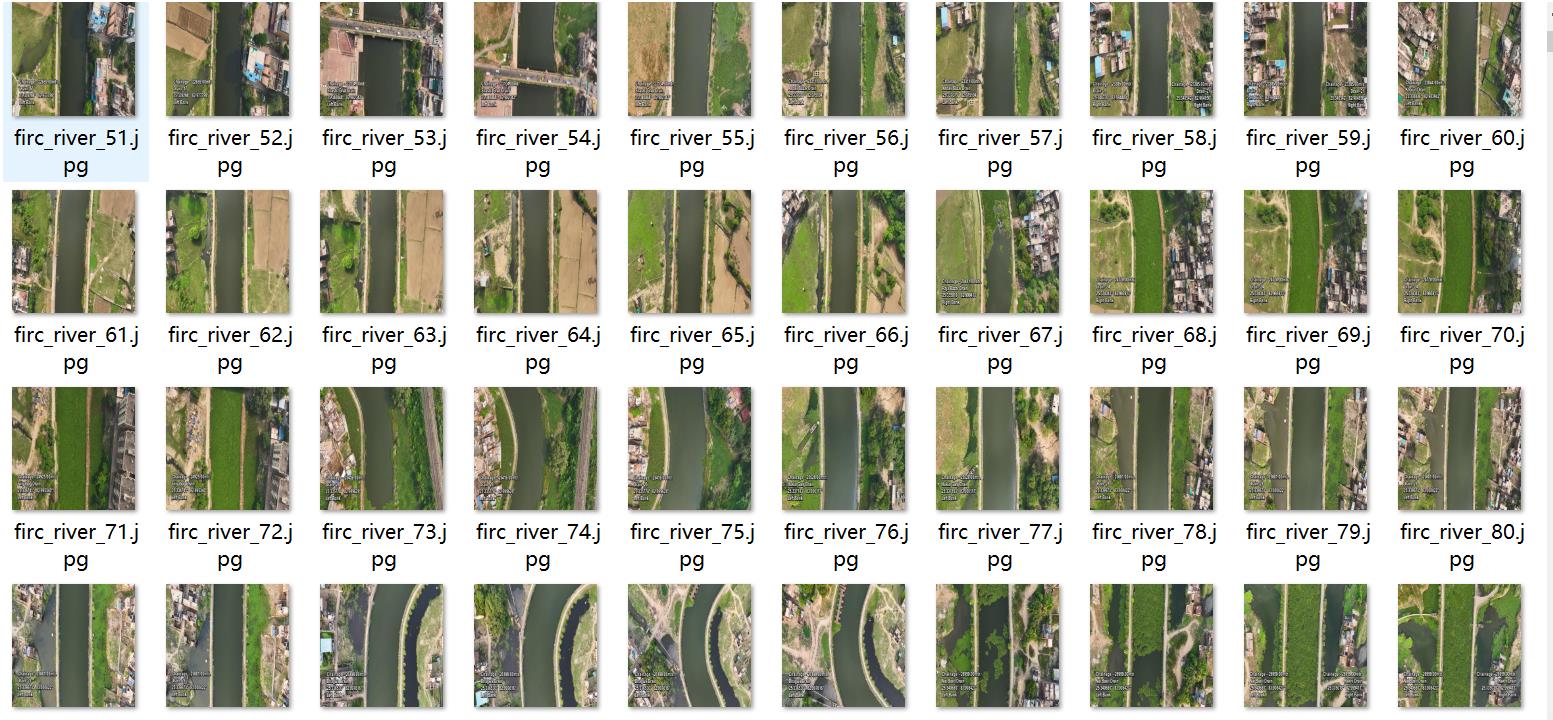
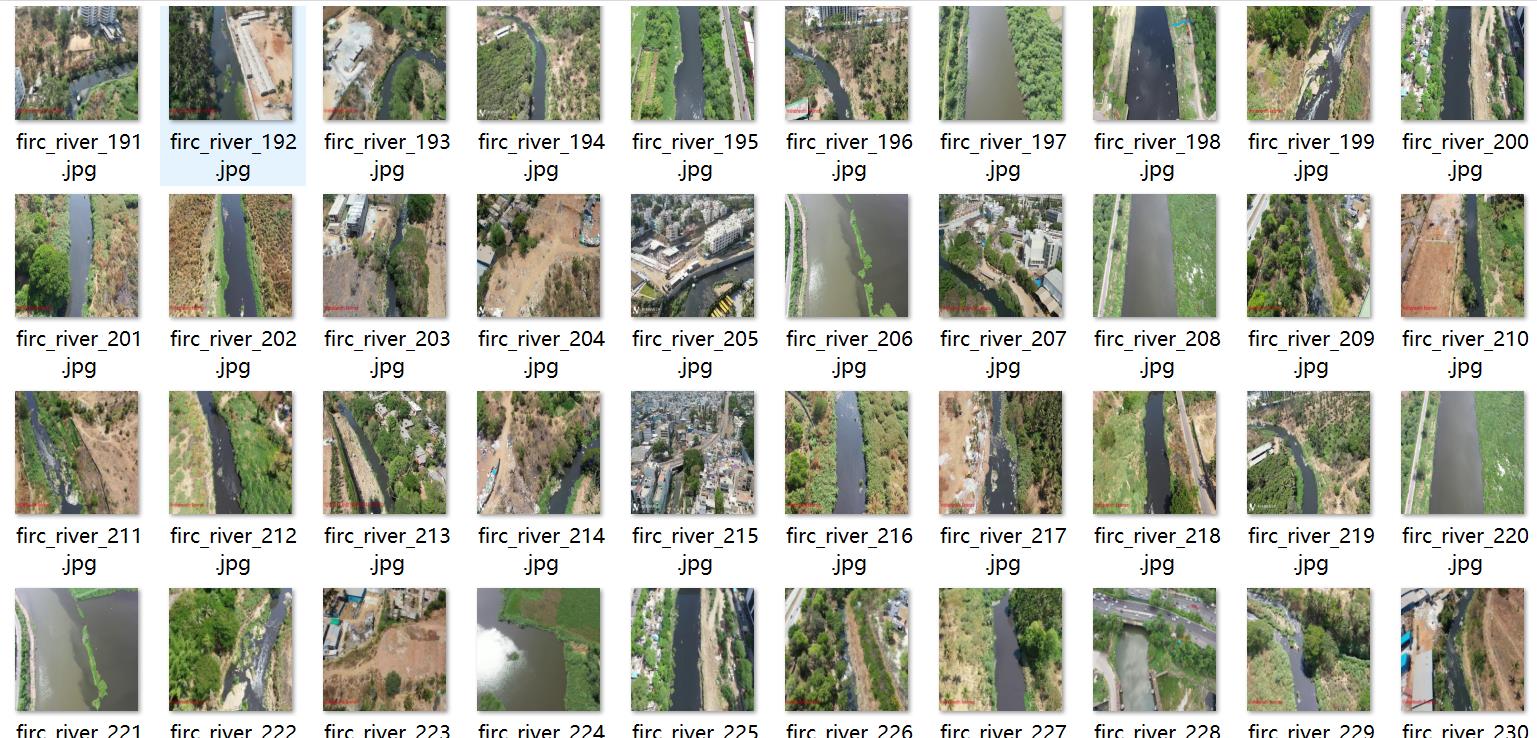
图片预览:
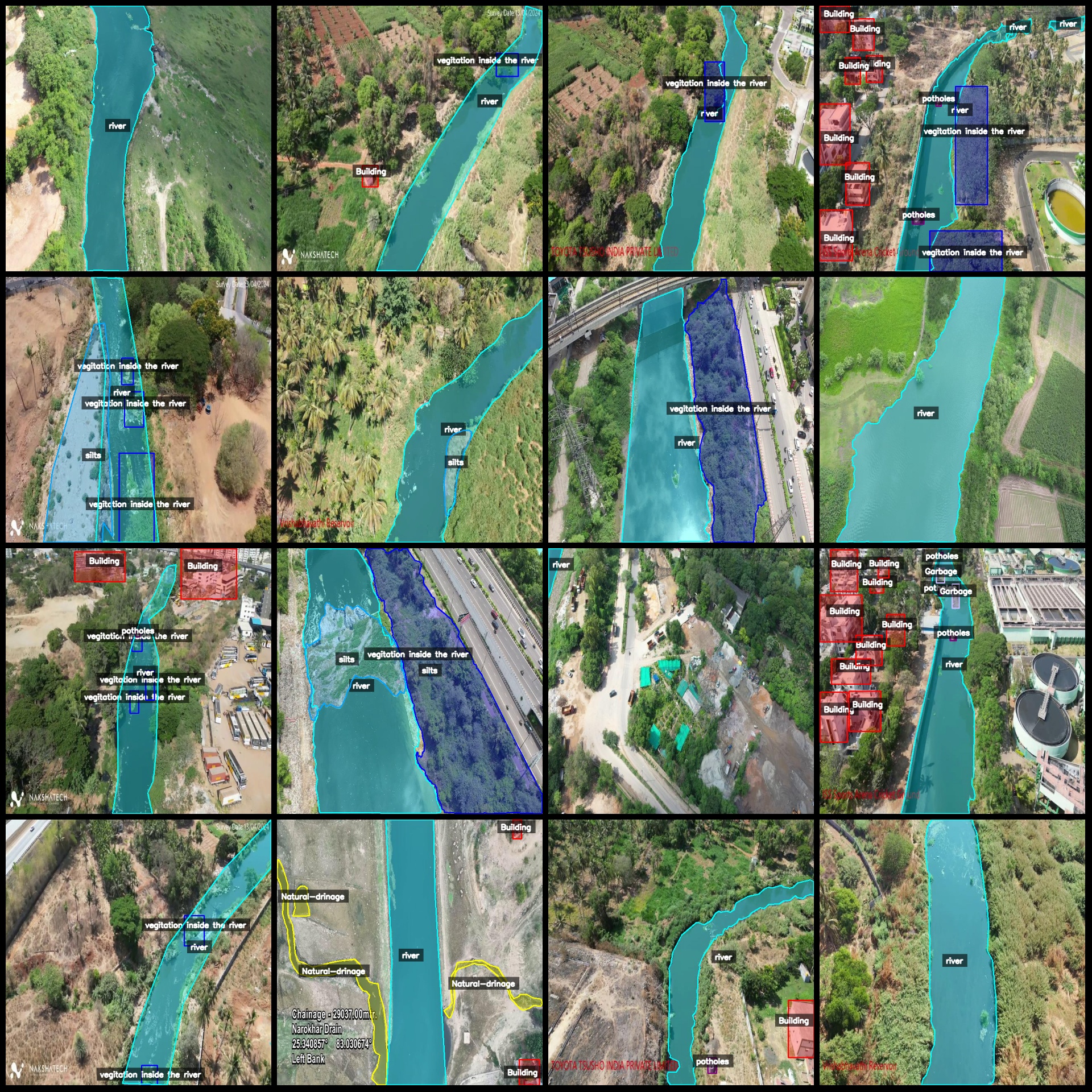
标注例子:
原图(随机抽16张图):

标注绘制结果:
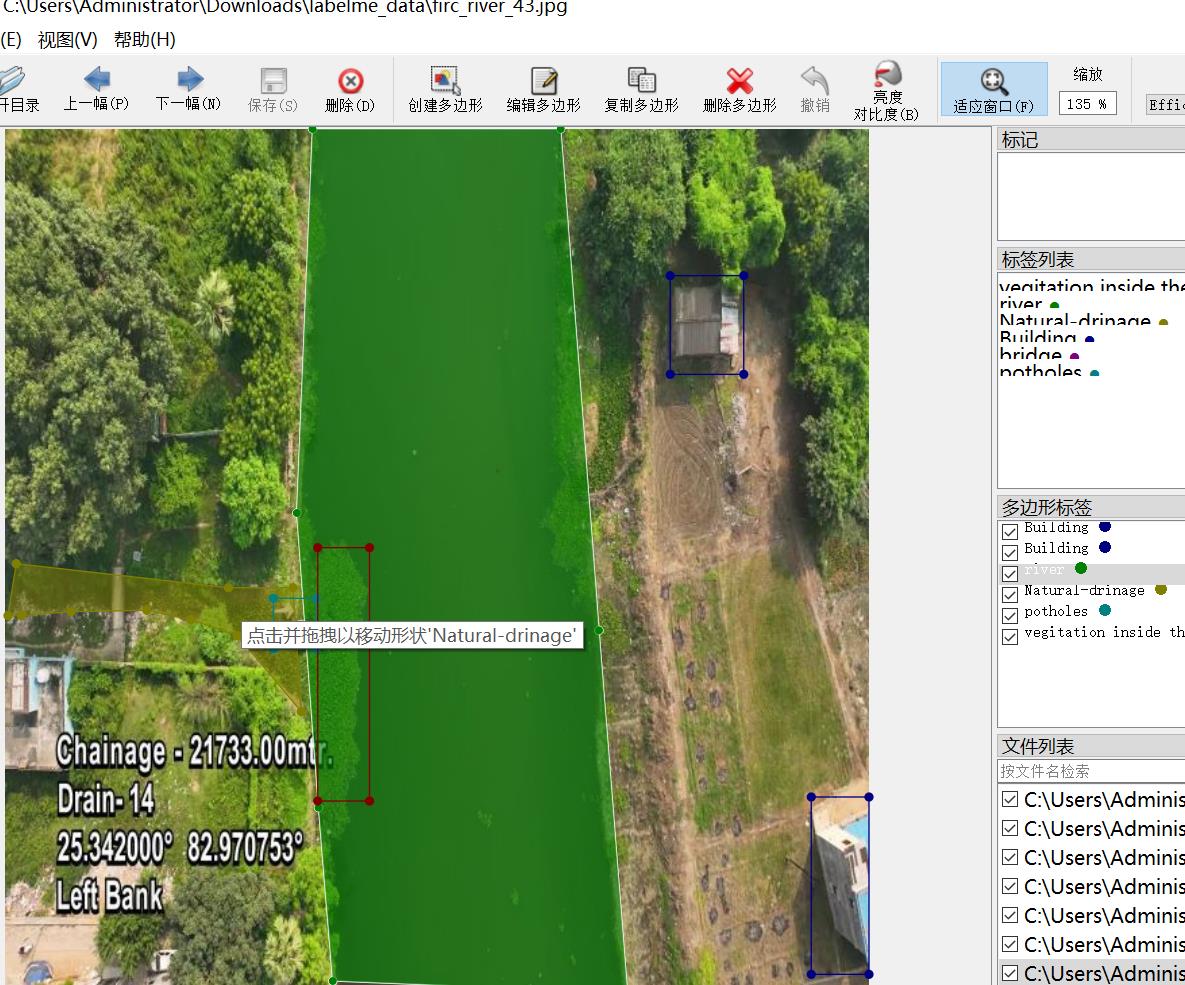
labelme编辑图实例: