1、关于海康相机的像素指标
海康型号命名规则非常固定:
46 → 4MP
56 → 5MP
26 → 2MP
86 → 8MP
以我的相机型号为例:
bash
DS‑2CD3T46FWDV2‑I3S
↑
46 = 400 万像素这就证明我的相机是400万的,在相机的系统设置里,也能看到最大的分辨率。

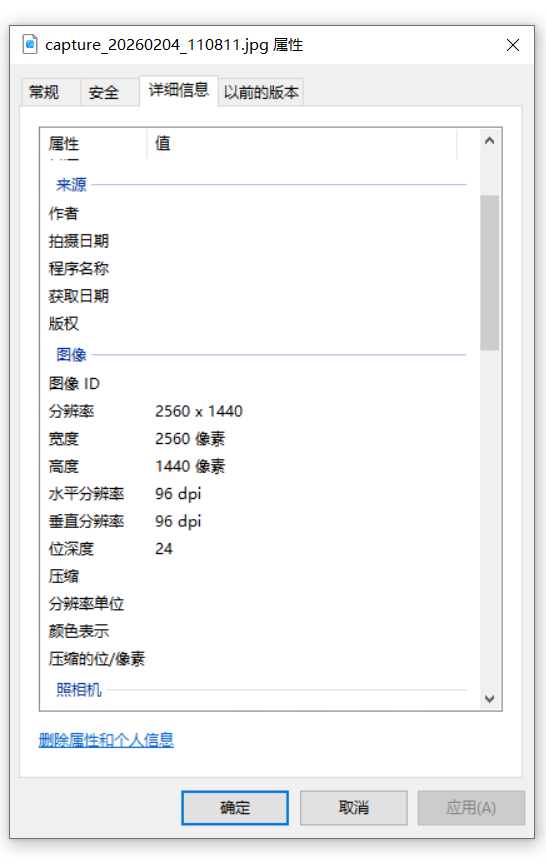
2、相机拍照的像素指标:
这样,我用代码拍的照片,尺寸就是400万像素的,如下图所示:
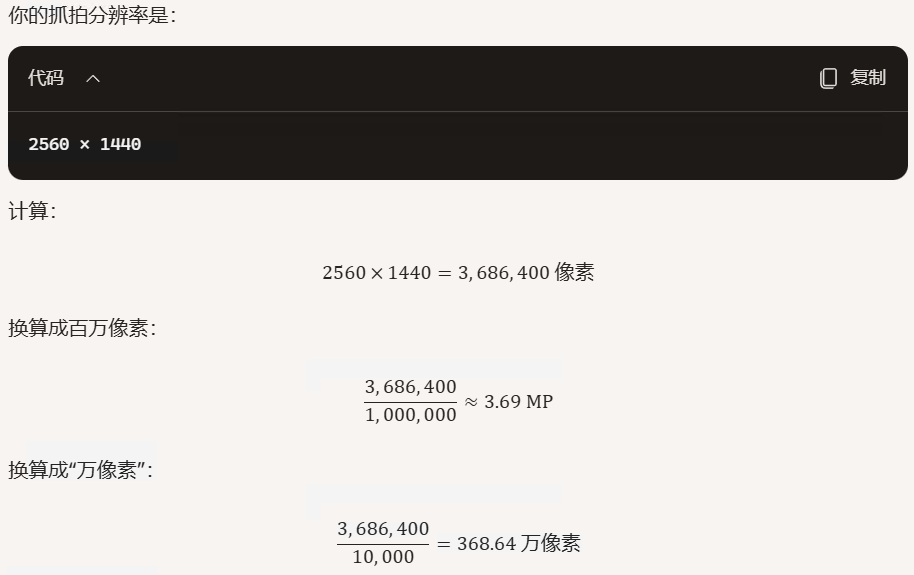
常见分辨率与像素对照表如下:
| 分辨率 | 像素数 | 百万像素 |
|---|---|---|
| 1920×1080 | 2,073,600 | 2.07 MP |
| 2560×1440 | 3,686,400 | 3.69 MP |
| 2592×1944 | 5,038,848 | 5.04 MP |
| 3840×2160 | 8,294,400 | 8.29 MP |
3、通过rtsp流抽帧的方式获取的照片尺寸对比
我们通过以下代码尝试抽取一个视频帧(rtsp流抽帧方式)
python
import cv2
def save_first_frame(rtsp_url, save_path="first_frame.jpg"):
cap = cv2.VideoCapture(rtsp_url)
if not cap.isOpened():
raise RuntimeError("RTSP 打不开,请检查地址、账号密码或网络")
ret, frame = cap.read()
cap.release()
if not ret:
raise RuntimeError("无法读取第一帧")
cv2.imwrite(save_path, frame)
print(f"已保存第一帧:{save_path}")
if __name__ == "__main__":
rtsp = "rtsp://admin:123456qwer@192.168.1.64:554/Streaming/Channels/101"
save_first_frame(rtsp, "rtsp_first_frame.jpg")我们发现两个照片的像素值是一样的:
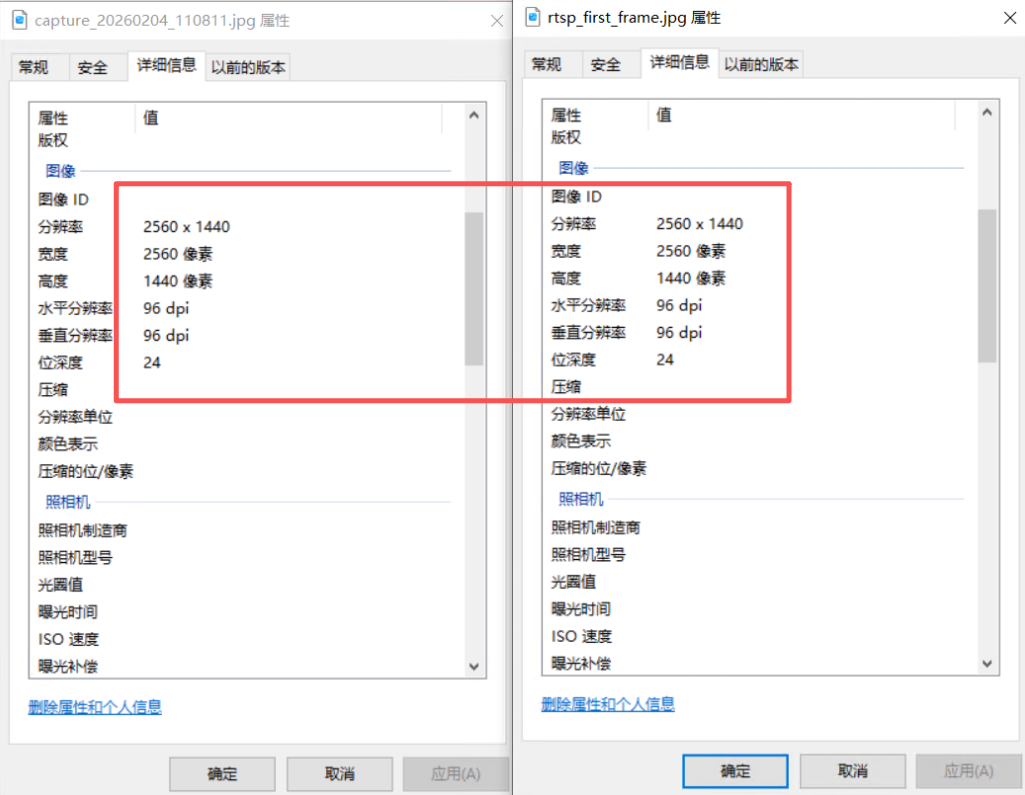
而且rtsp抽帧的文件还会更大,300多K,而我拍照的照片才100多K,画面是一样的情况下。
但是我们通过以下指标分析他的整体效果。
| 指标 | 说明 | 用途 |
|---|---|---|
| Laplacian 方差(锐度) | 衡量图像"清晰度/锐度" | 越大越清晰 |
| Sobel 边缘强度 | 边缘梯度平均值 | 越大越锐利 |
| 图像对比度(标准差) | 灰度分布离散程度 | 越大越通透 |
| 图像噪声估计(高频能量) | 高频噪声强度 | 越小越干净 |
| 文件大小(字节) | JPEG 压缩程度 | 越大不代表越清晰,但可参考 |
锐度指标可以分析如下:
代码:
python
import cv2
pic_capture = r'D:\pythonProject\hikvision\rd\captures\capture.jpg'
pic_frame = r'D:\pythonProject\hikvision\rd\captures\rtsp_frame.jpg'
img_capture = cv2.imread(pic_capture, 0)
score_capture = cv2.Laplacian(img_capture, cv2.CV_64F).var()
print("锐度指标score_capture:", score_capture)
img_frame = cv2.imread(pic_frame, 0)
score_frame = cv2.Laplacian(img_frame, cv2.CV_64F).var()
print("锐度指标score_frame:", score_frame)结果为如下,可以看出拍照的锐度指标更好。
python
锐度指标score_capture: 224.22128226752366
锐度指标score_frame: 199.0134425746421可以参考的,我们整合所有指标,代码如下:
python
import cv2
import numpy as np
import os
pic_capture = r'D:\pythonProject\hikvision\rd\captures\capture.jpg'
pic_frame = r'D:\pythonProject\hikvision\rd\captures\rtsp_frame.jpg'
def calc_metrics(img_path):
img = cv2.imread(img_path, 0)
if img is None:
raise FileNotFoundError(f"无法读取图片: {img_path}")
# 1. Laplacian 方差(锐度)
sharpness = cv2.Laplacian(img, cv2.CV_64F).var()
# 2. Sobel 边缘强度
sobel = cv2.Sobel(img, cv2.CV_64F, 1, 1)
edge_strength = np.mean(np.abs(sobel))
# 3. 对比度(灰度标准差)
contrast = img.std()
# 4. 高频噪声(FFT 高频能量)
f = np.fft.fft2(img)
fshift = np.fft.fftshift(f)
rows, cols = img.shape
crow, ccol = rows // 2, cols // 2
# 去掉低频区域,只保留高频
mask = np.ones((rows, cols), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 0
high_freq_energy = np.sum(np.abs(fshift * mask))
# 5. 文件大小
file_size = os.path.getsize(img_path)
return {
"sharpness": sharpness,
"edge_strength": edge_strength,
"contrast": contrast,
"high_freq_energy": high_freq_energy,
"file_size": file_size
}
# 计算两个图的指标
cap_metrics = calc_metrics(pic_capture)
frame_metrics = calc_metrics(pic_frame)
print("\n===== 抓拍 snapshot 指标 =====")
for k, v in cap_metrics.items():
print(f"{k}: {v}")
print("\n===== RTSP 抽帧 指标 =====")
for k, v in frame_metrics.items():
print(f"{k}: {v}")
print("\n===== 对比建议 =====")
print("锐度 sharpness:越大越清晰")
print("边缘 edge_strength:越大越锐利")
print("对比度 contrast:越大越通透")
print("高频噪声 high_freq_energy:越小越干净")
print("文件大小 file_size:仅供参考,不代表清晰度")运行得到以下结果:
python
D:\CondaEnv\hikvision\python.exe D:\pythonProject\hikvision\rd\cap_frame对比.py
===== 抓拍 snapshot 指标 =====
sharpness: 224.22128226752366
edge_strength: 0.8776576063368056
contrast: 79.41300921288219
high_freq_energy: 40652262408.14459
file_size: 108847
===== RTSP 抽帧 指标 =====
sharpness: 199.0134425746421
edge_strength: 0.8270654296875
contrast: 77.20571148292578
high_freq_energy: 38125482011.58763
file_size: 386716
===== 对比建议 =====
锐度 sharpness:越大越清晰
边缘 edge_strength:越大越锐利
对比度 contrast:越大越通透
高频噪声 high_freq_energy:越小越干净
文件大小 file_size:仅供参考,不代表清晰度
进程已结束,退出代码为 0从上面的五项指标来看,答案已经非常明确了------snapshot(抓拍接口)整体质量更好,更适合做后期 AI 分析。
指标 snapshot RTSP 抽帧 谁更好 原因
锐度 sharpness 224.22 199.01 ⭐ snapshot 细节保留更多
边缘强度 edge_strength 0.8776 0.8270 ⭐ snapshot 边缘更锐利
对比度 contrast 79.41 77.20 ⭐ snapshot 画面更通透
高频噪声 high_freq_energy 4.06e10 3.81e10 ⭐ RTSP RTSP 噪声略少(正常)
文件大小 file_size 108 KB 386 KB 无意义 JPEG 压缩率不同,不代表清晰度
综合指标来看:
snapshot 的 锐度更高
snapshot 的 边缘更清晰
snapshot 的 对比度更好
snapshot 的 细节保留更多
RTSP 抽帧噪声略低,但这是因为 OpenCV 保存 JPEG 时质量更高,与图像本身无关
对于 AI(OCR、车牌识别、人脸识别、目标检测)来说:snapshot 是更优输入。RTSP 抽帧只是"能用",但不是最佳质量。这个分析结果符合海康相机的图像管线特点:
snapshot → ISP 输出的静态图,细节最好
RTSP → 视频编码后解码出来的帧,细节损失不可逆
4、原因分析
napshot(拍照接口)图像链路
bash
传感器 RAW → ISP(降噪、锐化、HDR、白平衡) → JPEG 编码 → 输出特点:
直接来自 ISP 的"静态图像管线"
不经过视频编码器
不受码率限制
不受 GOP/I 帧/P 帧影响
细节保留最多
边缘最锐利
噪声最少
这是摄像机能输出的 最高质量图像。
RTSP 抽帧图像链路
bash
传感器 RAW → ISP → 视频编码器(H.264/H.265)→ 压缩 → RTSP 传输 → 解码 → OpenCV 再压 JPEG → 输出特点:
经过 H.264/H.265 压缩(损失性)
码率限制(你现在 6144 Kbps)
GOP 结构导致 P 帧、B 帧细节更差
解码后再压 JPEG → 二次损失
高频细节被抹掉
边缘变糊
纹理变平
视频编码器是为了"流畅",不是为了"清晰"
H.264/H.265 会:
去掉高频细节
模糊边缘
产生块状噪声
牺牲纹理
这些损失是不可逆的。