1. OGN(Orientation Guided Normals)是什么?
OGN = Orientation Guided Normal Estimation
核心思想:
不是单纯依赖 PCA,而是利用点云的局部"方向分布"来约束法向方向,使其沿着真实几何结构变化,而不是跳变。
具体而言:
-
用 PCA 得到初步法向
-
计算每个点局部主方向(类似主曲率方向)
-
用邻域方向分布作为"指导向量 field"
-
使用加权图传播,让法向沿几何方向(edge/crease)一致,但不跨边界错误翻转
因此相比 PCA,它能够:
-
保持锐边
-
减少噪声
-
降低翻转错误
-
法向在表面连续区域一致
2. 数学原理(逐步推导)
(1) PCA 得到局部主方向
对点云每个点,找邻域 kNN / radius
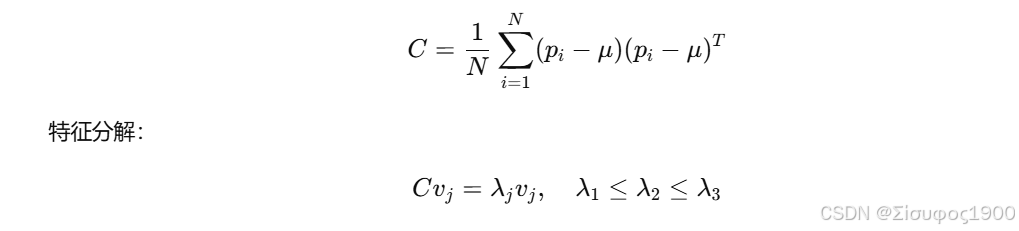
得到:
-
v1v_1v1:法向方向(初估)
-
v2v_2v2、v3v_3v3:切平面方向
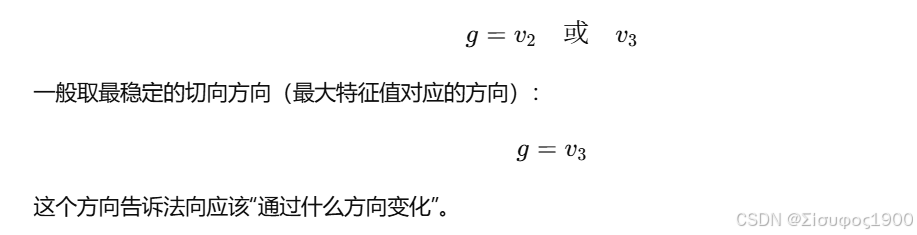
(2) 计算局部主方向(Guiding Direction)
定义 guiding direction 为:
(3) 构建权重图(graph)
两个点 i,j 的权重:

解释:
-
道路1:距离近的点权重大
-
道路2:切向方向一致 → 说明在同一个流形局部
(4) Guided normal smoothing
在图上做迭代:

(5) 最终法向 = 引导平滑后的法向
3、matlab实现
cpp
%% ----------- 读取点云 ------------
ptCloud = pcread('bun000.ply');
P = ptCloud.Location;
N = size(P,1);
% 参数
k = 30; % 邻域
h = 0.03; % smoothing 参数
%% ----------- Step 1: PCA 初始法向与切线方向 -----------
normals = zeros(N,3);
guides = zeros(N,3);
knn = KDTreeSearcher(P);
for i = 1:N
idx = knnsearch(knn, P(i,:), 'K', k);
nn = P(idx,:) - mean(P(idx,:),1);
C = (nn' * nn) / k;
[V,D] = eig(C);
[d,order] = sort(diag(D),'ascend');
V = V(:,order);
normals(i,:) = V(:,1)'; % 最小 eigen → 法向
guides(i,:) = V(:,3)'; % 最大 eigen → 主方向
end
%% ----------- Step 2: 法向方向一致化(Orientation Guided)-----------
normals_new = normals;
for iter = 1:10
disp(['Iteration ' num2str(iter)]);
normals_temp = zeros(N,3);
for i = 1:N
idx = knnsearch(knn, P(i,:), 'K', k);
wi = zeros(length(idx),1);
for t = 1:length(idx)
j = idx(t);
dist = norm(P(i,:) - P(j,:));
w1 = exp(-(dist^2) / (h^2));
% direction constraint
w2 = abs(dot(guides(i,:), guides(j,:)));
wi(t) = w1 * w2;
end
% weighted sum
Ni = wi' * normals_new(idx,:);
normals_temp(i,:) = Ni / norm(Ni);
end
normals_new = normals_temp;
end
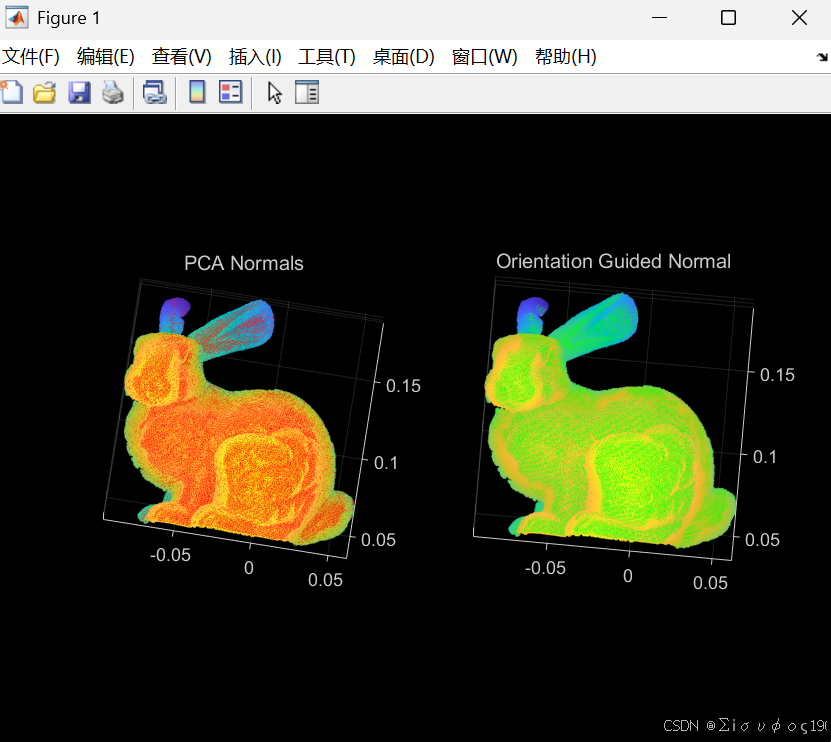
%% ----------- Step 3: 绘制结果比较 -----------
figure;
subplot(1,2,1);
pcshow(P, 'MarkerSize', 20); hold on;
quiver3(P(:,1), P(:,2), P(:,3), normals(:,1), normals(:,2), normals(:,3), 0.6, 'r');
title('PCA Normals');
subplot(1,2,2);
pcshow(P, 'MarkerSize', 20); hold on;
quiver3(P(:,1), P(:,2), P(:,3), normals_new(:,1), normals_new(:,2), normals_new(:,3), 0.6, 'g');
title('Orientation Guided Normal');