1.先搞懂:AUTOSAR E2E 制 定标准?
E2E 是数据传输的安全卫士,在汽车行业,AUTOSAR就是为这位安全卫士制定工作手册的行业组织。
为什么需要统一标准?想象一下:一辆车的 ECU(电子控制单元)可能来自博世、大陆等不同供应商,通信总线可能采用 CAN、Flexray、以太网等不同类型,如果每家的 E2E 保护逻辑不一样,就会出现认得出的安全锁但解不开的混乱------比如刹车 ECU 的 E2E 校验码算法和车轮 ECU 不一致,就会导致安全信号误判。
AUTOSAR E2E 的核心使命是制定一套统一的、可复用的安全通信规范,让不同供应商的硬件、软件能无缝协作,同时满足 ISO 26262(汽车功能安全标准)最高 ASIL D 级的安全要求,确保从传感器到执行器的每一次数据传输都有据可依、有错必查。
简单说:普通 E2E 是定制化安全方案,而 AUTOSAR E2E 是行业通用安全准则,让汽车安全通信有了统一的语言。

AUTOSAR E2E 标准制定原因
2.AUTOSAR E2E 的三个特点
(1)灵活适配的E2E profiles:一套标准覆盖所有场景
汽车里的通信场景千差万别:刹车信号需要毫秒级传输,电池温度数据可以周期性发送;CAN 总线适合短数据,以太网支持大数据量。AUTOSAR 为此设计了多种 E2E profiles(配置文件),每个 profile 都是一套定制化安全方案:
- 针对短数据(如刹车指令):用 Profile 1/2,精简 CRC 校验和计数器,确保低延迟;
- 针对长数据(如自动驾驶摄像头画面):用 Profile 4/5,支持分段传输校验,避免数据丢失;
- 针对高频数据(如方向盘角度):用 Profile 6,优化计数器周期,减少算力消耗。
每个 profile 都明确规定了 header 结构、校验算法、错误处理逻辑,车企只需根据场景选择,无需从零开发。
(2)多层级校验机制
AUTOSAR E2E 在基础 E2E 的计数器、CRC、ID三重保护基础上,新增了更贴合汽车场景的增强机制:
- 数据长度校验:接收方会验证数据长度是否与预设一致,避免因总线干扰导致数据截断(比如原本 8 字节的刹车指令变成 4 字节);
- 历史数据缓存:接收方会存储最新 2 代有效数据(generation 0=最新数据,generation 1=次新数据),如果当前数据校验失败,可临时使用历史数据过渡,避免系统突然失效;
- 多维度 ID 识别:除了数据ID,还增加源ID(发送方 ECU 编号)和目标ID(接收方 ECU 编号),防止跨 ECU 误触发,比如不能让空调 ECU 的信号控制刹车系统。
(3)软硬件解耦:适配软件定义汽车
AUTOSAR E2E的核心逻辑独立于硬件和通信总线,可通过中间件(如 Classic 平台的 RTE、Adaptive平台的 ARA)灵活调用:
- 向下:支持 CAN、CAN FD、LIN、Flexray、以太网等所有汽车常用总线;
- 向上:可对接自动驾驶算法、电池管理系统(BMS)、车身控制系统等任意应用层软件;
- 开发端:工程师用 Vector PREEvision / DaVinci 等工具即可配置 E2E 参数,无需修改底层代码,大幅缩短开发周期。
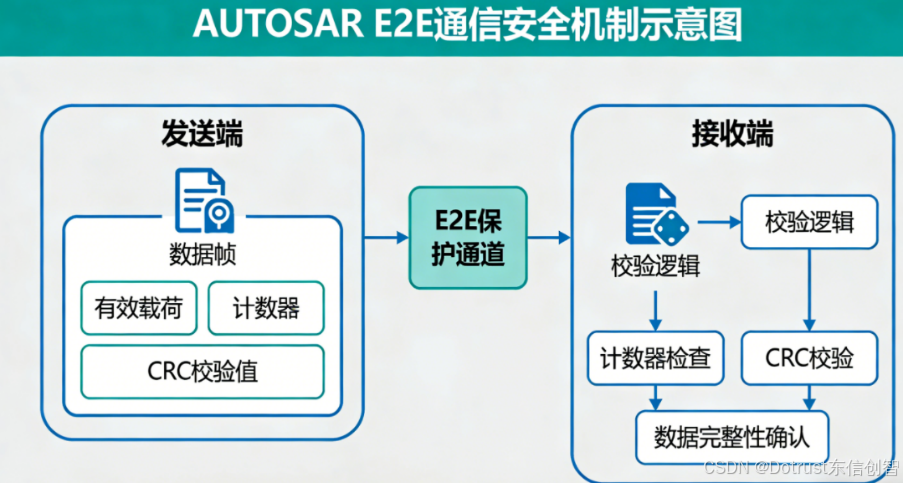
E2E通信安全机制示意图
3.落地案例:AUTOSAR E2E 如何守护真实出行
(1)自动驾驶域:跨域通信的安全桥梁
某国产车企的 L3 级自动驾驶系统,采用 AUTOSAR Adaptive 平台:
- 传感器(摄像头 / 雷达)采集的路况数据,通过 E2E Profile 5 进行分段校验,确保传输过程中不被篡改;
- 自动驾驶域控制器(DCU)发出的转向、加速指令,通过 E2E Profile 1 进行低延迟传输,计数器周期设为 10ms,确保指令即时响应;
- 当总线出现干扰导致数据校验失败时,系统自动切换到历史缓存数据,同时触发降级模式(从 L3 降到 L2),避免突发失效。
(2)电池管理系统(BMS):预防热失控的第一道防线
新能源汽车的 BMS 需要实时传输电池电压、温度、SOC(剩余电量)数据,AUTOSAR E2E 的应用让安全更有保障:
- 每节电池的电压数据都带唯一源 ID 和 CRC32 校验码,接收方(整车控制器 VCU)实时校验;
- 若某节电池温度数据连续 3 个周期超时未更新(超时阈值可配置),VCU 立刻触发安全策略:降低充电功率、启动散热系统,避免电池热失控;
- 即使 CAN 总线出现 bit 错误,CRC 校验也能 100% 检测到,避免因数据错误导致 过充 / 过放。
(3)传感器硬件集成
大陆集团等供应商已开始将 AUTOSAR E2E 逻辑集成到传感器硬件中:
- 传感器内部集成FPGA芯片,直接在硬件层面计算 CRC 和计数器,无需占用 ECU 算力;
- 传感器输出的数据已带 E2E 校验信息,可直接接入汽车总线,简化 ECU 处理流程;
- 测试显示:硬件化 E2E 的校验延迟从软件实现的 50μs 降至 5μs,同时 ECU 算力占用减少 15%。
4. AUTOSAR E2E趋势
(1)与功能安全深度融合
未来 AUTOSAR E2E 将直接对接 ISO 26262 的安全分析工具,自动生成符合 ASIL 等级的配置参数 ------ 比如根据刹车系统 ASIL D的要求,自动选择 CRC32 校验、1ms 超时阈值等安全参数,减少人工配置错误,这类工具需要集合功能管理,功能安全分析,软件设计,通讯设计于一身才能实现深度融合,如:PREEvision。
(2)适配高阶自动驾驶大模型
针对 E2E + VLA(视觉语言动作模型)的大模型数据传输需求,AUTOSAR 将新增大带宽低延迟 profile,支持TB级数据的高效校验,同时优化与英伟达 Thor、地平线征程 6 等高端芯片的适配,降低算力消耗。
(3)跨平台兼容性升级
随着 Classic 平台(传统汽车)和 Adaptive 平台(智能汽车)的融合,AUTOSAR E2E 将实现一次配置,跨平台复用;比如:同一套 E2E 参数,既能在传统 ECU 上运行,也能在自动驾驶域控制器上使用,助力车企快速迭代车型。
5.基于PREEvision模型开发
在 PREEvision 的模型驱动流程中可完成 E2E 需求定义、架构建模、配置映射、数据一致性校验,并通过ARXML与AUTOSAR工具链联动,最终实现 E2E 机制的部署与验证。
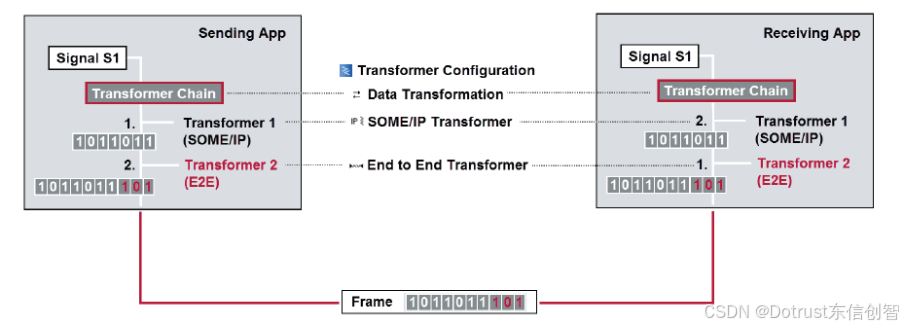
E2E Transformer
(1)需求与安全定义
在 PREEvision 的需求层,明确 E2E 保护目标(如信号完整性、防重放、容错等级),关联ISO 26262 ASIL等级,确定 E2E Profile、Data ID、Counter 周期、CRC 算法等参数。
建立需求到 E2E 模型元素的双向追溯链路,确保安全目标可跟踪。
(2)E2E 架构建模
功能层:定义需 E2E 保护的功能接口与信号组,标记安全关键信号。
软件层:创建 SWC 的 Sender/Receiver 端口,配置 E2E Transformer、E2E ComCallout,绑定 E2E Stack 模块(如 E2E Library、RTE 集成点)。
通信层:在 CAN/LIN/Ethernet 总线模型中,为 PDU 添加 E2E 头部 / 尾部,分配 E2E 相关的网络资源(如:帧 ID、IP 端口)。
硬件层:关联 ECU 的硬件加密模块(如 HSM),确保 E2E 校验的硬件加速支持。
(3)E2E 配置映射与参数化
在 PREEvision 中配置 E2E 关键参数:SyncCounter 初始值、MaxDeltaCounter(防重放窗口)、DataID 范围、CRC 多项式、错误处理策略(如丢弃、降级、上报 DTC)。
通过 PREEvision 的映射机制,将 E2E 参数绑定到 SWC 端口、PDU 及 ECU 配置,确保一致性。
(4)ARXML 导出与 AUTOSAR 工具链集成
从 PREEvision 导出包含 E2E 配置的 ARXML 文件(涵盖 System Description、SWC、ECU Extract)。
导入 Vector DaVinci Configurator工具,完成 MCAL/E2E Stack 的底层配置,生成 E2E 相关的 C 代码与配置头文件。
若使用 Simulink 开发 SWC,通过 ARXML 实现 PREEvision 与 Simulink 的双向同步,在 Simulink 中添加 E2E 校验逻辑并生成代码。
(5)一致性校验与仿真验证
用 PREEvision 的规则引擎检查 E2E 模型:参数完整性、映射正确性、Profile 合规性。
联合 CANoe 等工具,验证 E2E 发送 / 接收的 CRC 校验、Counter 递增、错误注入后的降级行为。
(6)部署与测试闭环
将生成的 E2E 配置代码集成到 ECU 工程,编译并刷写硬件。
回归 PREEvision 模型,基于测试结果迭代优化 E2E 参数(如调整 MaxDeltaCounter 以适配总线延迟)。
总结
AUTOSAR E2E 不是简单的"E2E + 标准",而是汽车行业为软件定义汽车量身打造的安全通信基石。结合PREEvision开发工具实现统一规范、灵活适配、软硬件解耦的设计,让不同供应商的技术无缝协作,既保障了刹车、电池等核心系统的安全,也为高阶自动驾驶的落地扫清了障碍。