1 简介
文章目录
- [1 简介](#1 简介)
-
- [1.1 什么是自主机器人](#1.1 什么是自主机器人)
- [1.2 什么是运动规划](#1.2 什么是运动规划)
- [1.3 前端:路径发现](#1.3 前端:路径发现)
- [1.4 后端:轨迹生成](#1.4 后端:轨迹生成)
- [1.5 MDP 和 MPC](#1.5 MDP 和 MPC)
1.1 什么是自主机器人
-
Definition: an autonomous robot is a robot that performs behaviors or tasks with a high degree of autonomy (without external influence)
-
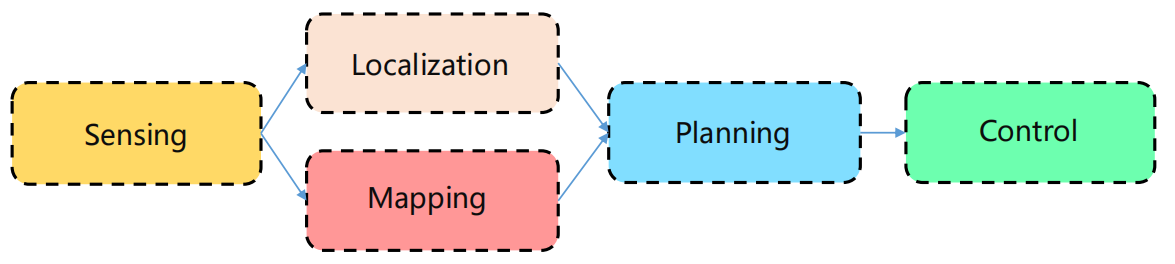
Perception-Planning-Control action loop
1.2 什么是运动规划
- 基本要求
- 安全:避免碰撞
- 光滑性:节约能量, 舒适
- 运动-动力学可行性:可执行、可控
- Old-school pipeline
- 前端 path finding
- 搜索初始安全路径
- 低维
- 离散空间
- 后端 trajectory generation
- 搜索可行轨迹
- 高维
- 连续空间
- 前端 path finding
1.3 前端:路径发现
- 基于搜索的路径发现
- 图搜索基础
- Dijkstra 和 A*
- 跳点算法 Jump Point Search
- 基于采样的路径发现
- 概率路线图 Probabilistic Road Map
- 快速采样随机树 Rapidly-exploring Random Tree
- Optimal Sampling-based Methods
- Advanced Sampling-based Methods
- 满足运动-动力学要求的路径发现
- State-state Boundary Value Optimal Control Problem
- State Lattice Search
- Kinodynamic RRT*
- Hybrid A*
1.4 后端:轨迹生成
- MINIMUM SNAP TRAJECTORY GENERATION
- Differential Flatness
- Minimum Snap Optimization
- Closed-form Solution to Minimum Snap
- Time Allocation
- Implementation in Practice
- SOFT AND HARD CONSTRAINED TRAJECTORY OPTIMIZATION
- 软约束轨迹优化 Soft Constrained Trajectory Optimization
- 硬约束轨迹优化 Hard Constrained Trajectory Optimization
1.5 MDP 和 MPC
- 基于马尔可夫决策过程的规划
- Uncertainties in Planning and MDP
- Minimax Cost Planning and Expected Cost Minimal Planning
- Value Iteration and Real-Time Dynamic Programming
- 机器人规划的模型预测控制
- Linear MPC
- Non-linear MPC