前言
随着无人机技术在军事领域的广泛应用,无人机视角下的军事目标检测成为计算机视觉与军事智能化结合的核心研究方向之一。目前,公开场景中针对无人机航拍、军事目标细分类的高质量标注数据集较为稀缺,多数数据集存在类别粗糙、场景单一、数据量不足等问题,难以满足模型训练、算法优化及实际落地需求。基于此,本文整理并公开一套无人机视角军事目标细分类检测数据集,同时基于该数据集完成YOLO系列5个主流版本的训练与验证,同步提供训练结果可视化图,为相关领域研究者、工程实践者提供可靠的数据集支撑与模型参考。
数据集详细信息
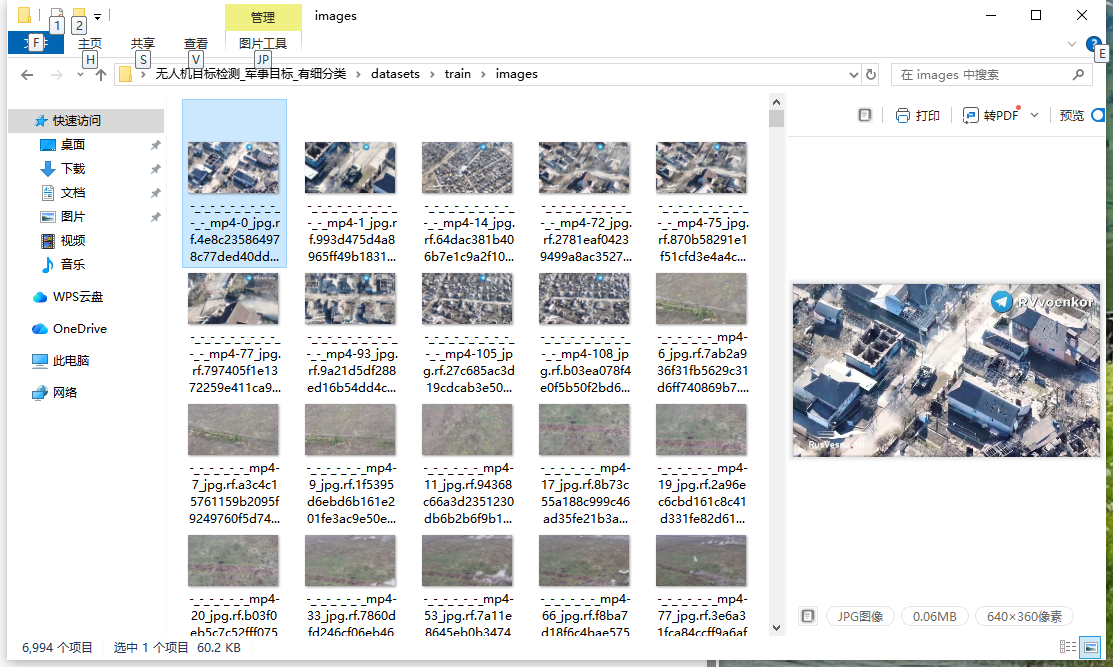
本数据集专注于无人机航拍场景下的军事目标细分类检测,所有数据均经过人工精准标注、去重、清洗,场景覆盖真实军事演练相关场景,包含俯拍、侧拍、远距、近景等多种无人机拍摄角度,目标类别细分明确,有效解决现有数据集类别粗糙、场景脱离实际应用的痛点,可直接用于目标检测模型的训练、验证与测试。
数据集具体划分如下,划分比例合理,无需研究者额外进行拆分、清洗,导入模型框架即可直接使用:
-
训练集:6994张,用于模型的核心训练,涵盖各类军事细分类目标及不同场景变化,保障模型的拟合能力与泛化性;
-
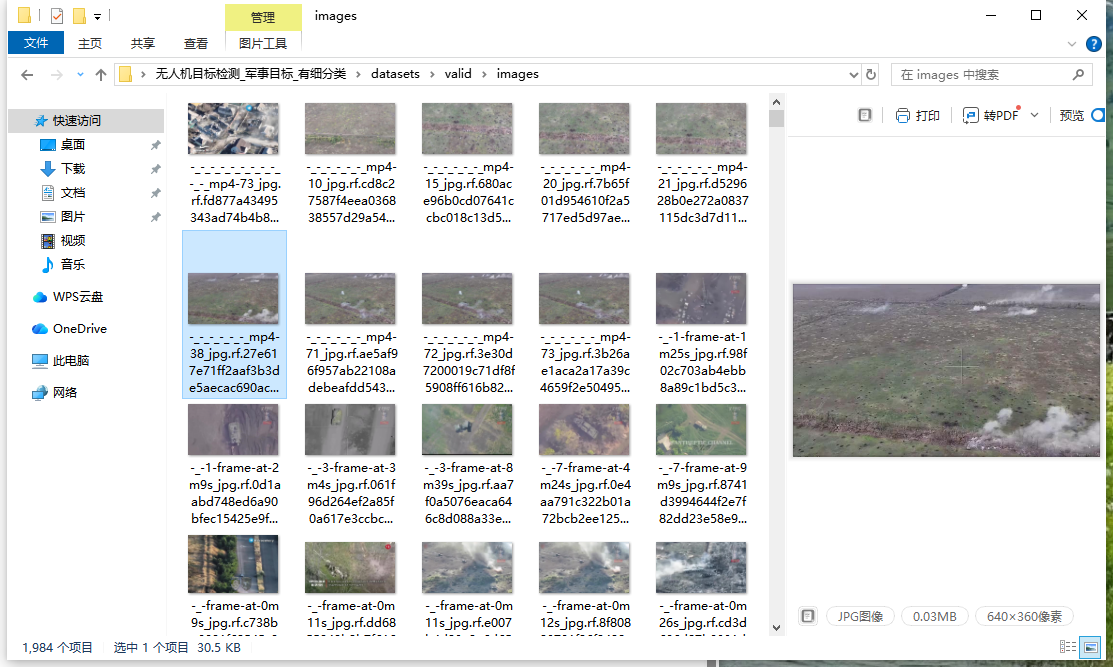
验证集:1984张,用于训练过程中模型参数的调试与性能验证,实时监控模型过拟合、欠拟合情况,优化模型超参数;
-
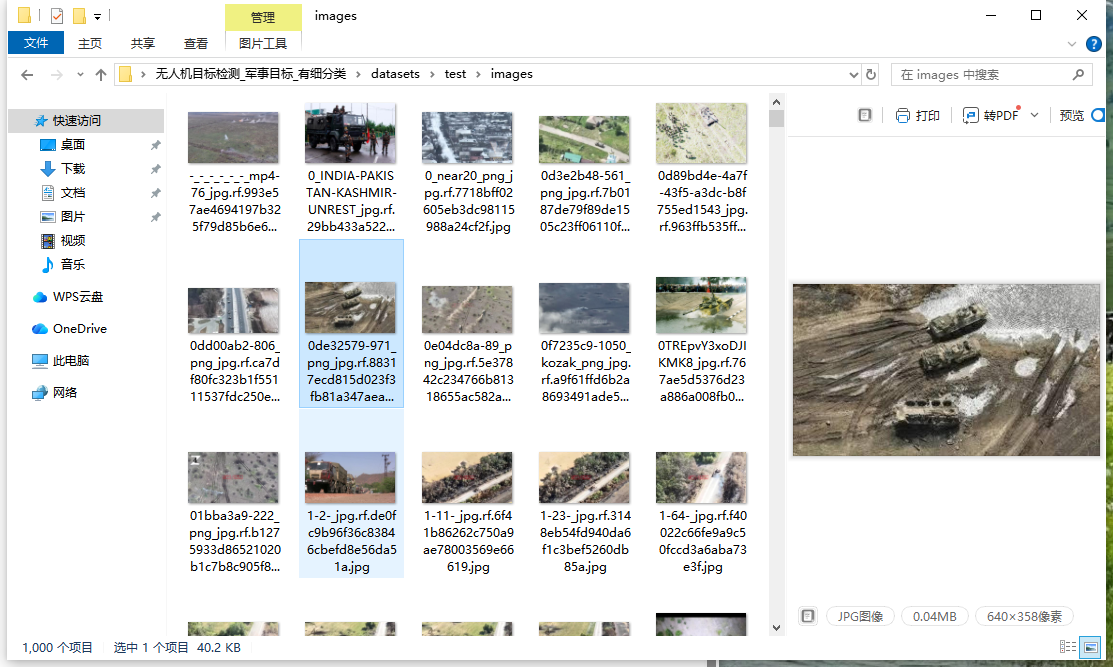
测试集:1000张,用于模型训练完成后的最终性能测试,全程独立于训练过程,确保测试结果的真实性与客观性。
数据集标注规范,边界框精准,细分类目标标注清晰,无漏标、误标情况,能够精准匹配无人机视角下军事目标的检测需求,适用于各类目标检测算法的训练与对比实验。
训练模型及结果说明
为验证本数据集的有效性与实用性,基于该数据集完成了YOLO系列5个主流版本的完整训练与验证,分别为YOLO v5、YOLO v8、YOLO v11、YOLO v12、YOLO v26。
训练过程严格控制超参数一致性,采用相同的训练环境、迭代次数、损失函数及评估指标,确保不同版本模型的训练结果具有可比性,能够真实反映各版本模型在本军事细分类数据集上的检测性能。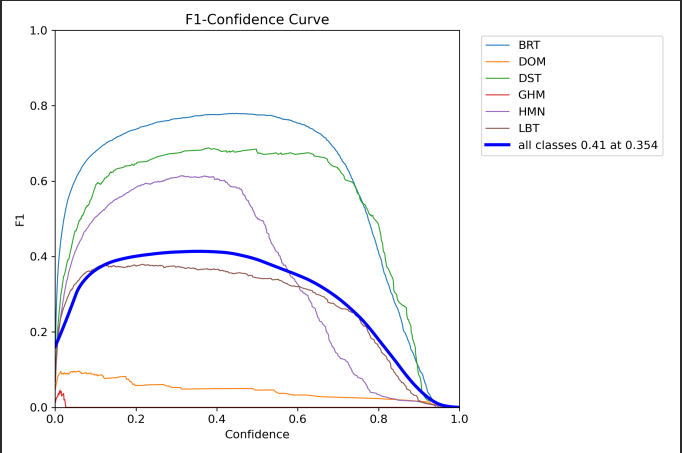
本次训练已生成完整的结果可视化图,包括各版本模型的训练损失曲线、验证精度曲线、PR曲线及实际检测效果可视化图,可清晰直观地对比5个YOLO版本的训练效果、收敛速度、检测精度及泛化能力,为研究者选择适配的模型版本、优化算法提供直接参考。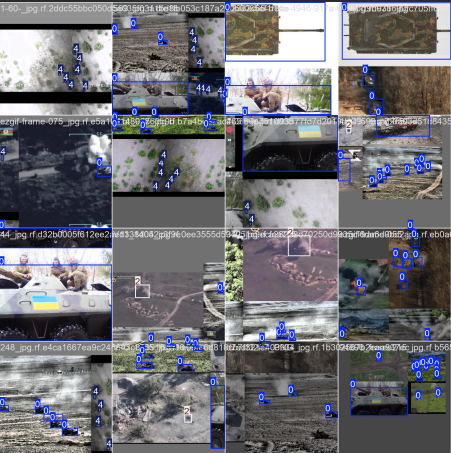
从训练结果来看,各版本模型均能基于本数据集实现稳定收敛,检测精度与召回率表现良好,充分证明了本数据集的高质量与实用性,能够为军事目标检测相关的算法研究、模型优化提供可靠的数据支撑。
总结
本文公开的无人机视角军事目标细分类检测数据集,数据量充足、划分合理、标注规范,场景贴近真实军事应用,有效填补了现有公开数据集在无人机军事细分类检测领域的空白。同时,基于该数据集完成的YOLO v5、v8、v11、v12、v26五个版本的训练与验证,以及生成的完整训练结果图,能够为相关领域的研究者、工程实践者提供便捷的数据集使用参考与模型性能对比依据。
后续可基于本数据集进一步开展算法优化、轻量化部署等相关研究,也欢迎相关研究者交流探讨,共同推动无人机视角军事目标检测技术的发展。如需获取本数据集及完整训练结果图,可留言咨询。