雷达信号处理:运动目标相参积累------Radon-Fourier算法,用于检测运动目标,实现距离和多普勒参数估计。 Matlab程序,包含函数文件和使用文件,代码简洁易懂,注释详细。
一、系统概述
本技术文档聚焦于一套基于Radon-Fourier变换(RFT)的雷达运动目标检测与参数估计系统。该系统通过MATLAB实现,核心功能涵盖雷达回波信号仿真、脉冲压缩预处理、传统运动目标检测(MTD)以及RFT相参积累,最终实现对运动目标距离与速度参数的精准估计。
系统设计初衷在于解决传统MTD技术在处理高速运动目标时因距离徙动(Range Migration)和多普勒模糊(Doppler Ambiguity)导致的检测性能下降问题。相较于传统方法,RFT通过联合距离-多普勒域的参数搜索与相位补偿,能够有效处理线性运动目标的相参积累,尤其适用于无人机、高速飞行器等中高速运动目标的检测场景。
雷达信号处理:运动目标相参积累------Radon-Fourier算法,用于检测运动目标,实现距离和多普勒参数估计。 Matlab程序,包含函数文件和使用文件,代码简洁易懂,注释详细。
系统包含4个核心功能模块,各模块协同工作形成完整的信号处理链路,具体模块构成与功能定位如下表所示:
| 模块文件 | 核心功能 | 输入 | 输出 | 应用场景 |
|---|---|---|---|---|
| signal_generate.m | 雷达回波信号仿真与脉冲压缩 | 雷达参数(载频、带宽等)、目标参数(距离、速度等)、信噪比 | 脉冲压缩后信号、时间轴、距离轴 | 算法验证、仿真测试 |
| RFT.m | RFT相参积累核心计算 | 脉冲压缩信号、速度搜索向量、时间轴、采样率、载频 | RFT积累结果(距离-速度二维谱) | 运动目标参数估计 |
| RFTfunctiontest.m | 仿真验证流程 | 无(内部定义参数) | 可视化结果(时频图、距离-速度谱) | 算法功能验证、参数调试 |
| RFTrealdatatest.m | 实测数据处理流程 | 实测雷达数据文件(.mat) | MTD结果、RFT结果对比图 | 工程化验证、实际场景测试 |
二、核心技术原理
2.1 雷达信号处理基础
雷达检测运动目标的核心是通过分析回波信号的距离延迟 与多普勒频移实现目标定位与速度估计:
- 距离估计:基于信号传播时间差,通过"距离=光速×传播时间/2"(往返路径)计算目标距离;
- 速度估计:基于多普勒效应,运动目标会导致回波信号频率偏移,偏移量与目标径向速度成正比(多普勒频移=2×速度/波长)。
传统MTD技术通过对慢时间域信号做FFT实现多普勒频移估计,但当目标速度过高时,会出现两大问题:
- 多普勒模糊:当多普勒频移超过脉冲重复频率(PRF)的1/2时,频移会被折叠到可测范围内,导致速度估计错误;
- 距离徙动:目标在相参积累时间内的距离变化会导致回波信号在距离单元间"迁移",破坏信号相参性,降低积累增益。
2.2 RFT技术核心优势
RFT(Radon-Fourier Transform)通过联合Radon变换与Fourier变换,在距离-速度二维域实现相参积累,从根本上解决上述问题:
- Radon变换维度:通过预设速度搜索向量,对每个候选速度对应的"距离-时间"轨迹进行积分,补偿距离徙动;
- Fourier变换维度:对补偿后的信号进行频域处理,实现多普勒频移的精准估计与相参叠加;
- 相位补偿机制:通过构建与目标速度、载频、距离频率相关的相位补偿因子,消除信号传播过程中的相位失真,确保多脉冲信号的相参性。
RFT与传统MTD的性能对比可概括为:
| 技术指标 | 传统MTD | RFT |
|---|---|---|
| 距离徙动处理 | 无,高速目标积累增益显著下降 | 支持线性运动目标的距离徙动补偿 |
| 多普勒模糊抑制 | 依赖高PRF,易受盲速影响 | 通过速度搜索向量直接估计真实速度,抗模糊能力强 |
| 适用目标速度 | 中低速(速度<盲速) | 全速度范围(支持超盲速目标检测) |
| 计算复杂度 | 低(仅需慢时间FFT) | 中(与速度搜索点数成正比) |
三、模块功能详解
3.1 信号仿真模块(signal_generate.m)
该模块是系统的"信号源",负责生成符合真实雷达回波特性的信号,并完成脉冲压缩预处理,为后续检测算法提供输入数据。
3.1.1 核心功能
- 参数合法性校验:自动检查输入参数的完整性与合理性(如采样率需大于信号带宽,避免欠采样;目标参数向量长度需一致);
- 信号参数计算:基于输入的载频、带宽、脉冲重复频率等参数,计算信号波长、 chirp斜率(调频率)、快时间/慢时间轴等基础参数;
- 目标轨迹建模:支持多目标线性运动轨迹计算(距离=初始距离+速度×时间+0.5×加速度×时间²),可通过"flag"参数选择参与仿真的目标数量;
- 回波信号生成:生成线性调频(LFM)信号的回波模型,包含目标反射幅度、传播延迟、相位变化等真实特性;
- 噪声叠加:添加符合高斯分布的复噪声,模拟真实雷达的噪声环境,噪声功率可通过信噪比(SNR)参数控制;
- 脉冲压缩:通过"发射信号参考谱×回波信号谱共轭"的频域处理方式,实现脉冲压缩,将宽脉冲信号压缩为窄脉冲,提升距离分辨率。
3.1.2 关键输出
data_r:脉冲压缩后的回波信号矩阵(维度:脉冲数×距离单元数);t_fast/ta:快时间轴(单个脉冲内的采样时间)与慢时间轴(脉冲间的时间间隔);raxisreal:真实距离轴(单位:米),用于后续结果的距离标定。
3.2 RFT核心计算模块(RFT.m)
该模块是系统的"算法核心",实现RFT相参积累的核心逻辑,输入脉冲压缩后的信号,输出距离-速度二维积累结果。
3.2.1 处理流程
- 信号预处理:对输入的脉冲压缩信号进行快时间域FFT,并通过fftshift调整频率轴,将零频率点移至频谱中心,便于后续频率域处理;
- 速度搜索遍历 :针对速度搜索向量(
v_search)中的每个候选速度,执行以下操作:- 相位补偿 :构建相位补偿因子,补偿目标运动导致的距离-频率耦合相位差,将目标的多普勒频移"对齐"到零频点,确保多脉冲信号的相参性;
- 相参积累 :对补偿后的信号在慢时间域进行叠加求和(等效于零频点的Fourier变换结果),实现能量积累;
- 距离域转换:对积累后的信号进行快时间域IFFT,将信号从频率域转换回距离域,得到该候选速度下的距离-幅度分布;
- 结果输出:将所有候选速度的积累结果整合为二维矩阵(维度:速度搜索点数×距离单元数),即RFT相参积累结果。
3.2.2 关键设计
- 相位补偿因子:核心公式基于电磁波传播的相位特性,考虑了目标速度、载频、距离频率的联合影响,确保补偿的精准性;
- 计算效率优化 :通过向量化运算减少循环嵌套,同时引入
waitbar进度条,便于用户直观了解计算进度(尤其在速度搜索点数较多时)。
3.3 仿真验证模块(RFT_function_test.m)
该模块是系统的"仿真验证平台",通过预设雷达与目标参数,调用信号仿真与RFT核心模块,验证算法的功能正确性。
3.3.1 核心流程
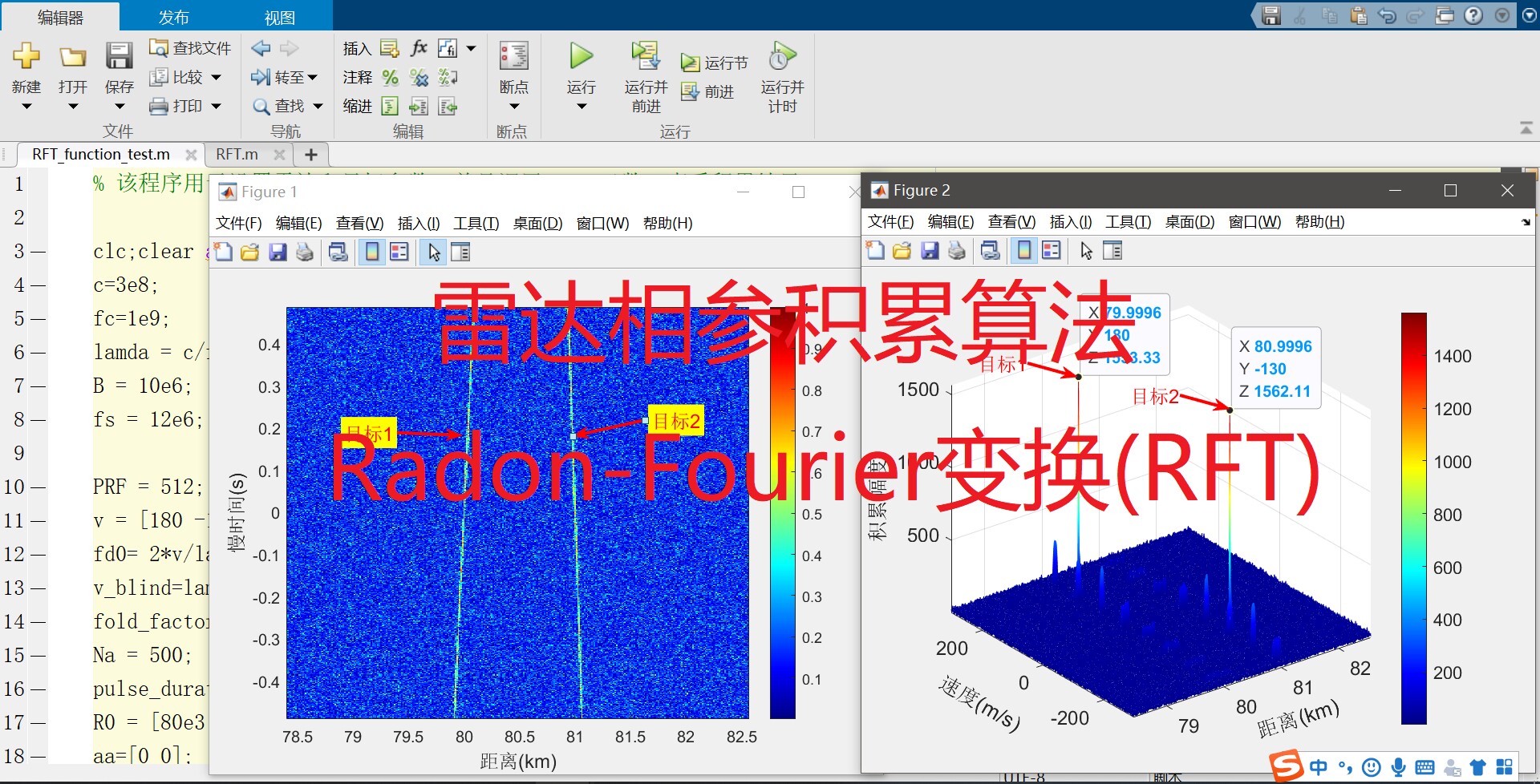
- 参数配置:定义雷达参数(载频1GHz、带宽10MHz、PRF 512Hz等)与目标参数(两个目标,速度分别为180m/s和-130m/s,初始距离分别为80km和81km);
- 盲速计算:基于雷达波长与PRF,计算雷达盲速(目标速度等于盲速时,多普勒频移为PRF整数倍,导致信号抵消),用于分析目标是否存在多普勒模糊;
- 信号生成 :调用
signal_generate.m生成脉冲压缩后的回波信号,并绘制"慢时间-距离"时频图,直观展示目标在距离域的分布; - RFT积累 :设置速度搜索范围(-300m/s至300m/s),调用
RFT.m实现相参积累,记录计算时间; - 结果可视化:通过3D mesh图展示RFT积累后的"距离-速度"二维谱,可清晰观察到目标在距离与速度维度的峰值,实现参数估计。
3.3.2 验证重点
- 多目标分辨能力:验证系统能否在相近距离或速度下区分两个目标;
- 高速目标检测性能:通过设置超盲速目标(如180m/s,需计算盲速判断是否超盲速),验证RFT对高速目标的积累效果;
- 信噪比适应性:通过调整SNR参数,测试系统在低信噪比环境下的目标检测灵敏度。
3.4 实测数据处理模块(RFT_realdata_test.m)
该模块是系统的"工程化验证平台",用于处理真实雷达采集的数据,对比RFT与传统MTD的检测效果,验证算法的工程应用价值。
3.4.1 核心流程
- 数据加载 :读取实测数据文件(
datalineartrajectory.mat),该文件包含线性轨迹目标(如无人机)的雷达回波数据; - 雷达参数提取:从数据文件中获取雷达中心频率(通过起始/终止频率计算)、带宽、PRF等关键参数,避免手动输入误差;
- MTD处理:对实测数据进行传统MTD处理(慢时间域FFT),生成多普勒频移-距离二维谱,作为性能对比基准;
- RFT处理 :
- 频率轴调整 :对实测数据进行快时间FFT,调整频率轴范围;
- 超采样优化 :通过超采样(
upsample_rate=12)扩展多普勒轴的分辨率,提升速度估计精度; - 速度搜索与积累:同RFT核心模块逻辑,生成高分辨率的距离-速度二维谱;
- 结果对比与保存:通过3D mesh图和二维热力图,直观对比MTD与RFT的检测效果(如RFT对目标的积累峰值更尖锐,距离-速度定位更精准),并保存RFT结果供后续分析。
3.4.2 工程化设计
- 参数自适应:从实测数据中自动提取雷达参数,减少人工干预,提升工程适用性;
- 噪声控制:预留噪声叠加接口(注释代码),可用于测试算法在不同噪声水平下的鲁棒性;
- 可视化优化:采用专业的字体(Times New Roman)、坐标轴标注与颜色映射(jet色表),符合工程报告的可视化标准;
- 结果保存 :通过
save函数保存RFT结果,支持后续数据复盘与算法优化。
四、系统使用指南
4.1 仿真验证流程(适用于算法调试)
- 打开MATLAB,将系统所有模块文件放入同一工作目录;
- 运行
RFTfunctiontest.m,系统会自动完成参数配置、信号仿真、RFT积累与结果可视化; - 调整参数进行测试:
- 若需测试高速目标,修改
v参数(如设置为500m/s); - 若需测试低信噪比性能,降低
SNR参数(如设置为0dB); - 若需增加目标数量,扩展
R0、v、SNR等参数向量的长度。
- 若需测试高速目标,修改
4.2 实测数据处理流程(适用于工程验证)
- 准备实测数据文件(需与
datalineartrajectory.mat格式兼容,包含data_linear(回波数据)、StartFreq(起始频率)、StopFreq(终止频率)、PRF等关键变量); - 修改
RFTrealdatatest.m中的数据加载路径,确保正确读取实测数据; - (可选)调整超采样率(
upsample_rate):增大超采样率可提升速度分辨率,但会增加计算时间; - 运行
RFTrealdatatest.m,系统会输出MTD与RFT的对比结果,可通过标注的"UAV"目标位置,直观判断两种算法的检测性能。
4.3 常见问题排查
- 参数不匹配错误 :若运行时提示"Check the length of target motion vectors",需检查
R0、v、SNR、aa等目标参数向量的长度是否一致; - 欠采样错误 :若提示"fsfs(采样率)参数,确保采样率大于信号带宽(
B); - 计算时间过长 :若RFT计算耗时过久,可减少速度搜索向量的长度(如将
v_axis从-300:300调整为-200:200),或降低超采样率; - 目标检测不到 :若结果中未出现目标峰值,可尝试提高
SNR参数(降低噪声),或检查目标速度是否超出速度搜索范围。
五、系统扩展建议
5.1 功能扩展方向
- 非线性运动目标支持:当前RFT仅支持线性运动目标(加速度为0),可扩展为"Radon-Fourier-Transform with Acceleration Search"(RFT-A),增加加速度搜索维度,支持匀加速运动目标检测;
- 实时处理优化:当前系统基于MATLAB的脚本运行,计算效率较低,可通过C/C++移植核心算法,或采用GPU加速(如CUDA),提升实时处理能力;
- 多通道信号处理:扩展为多输入多输出(MIMO)雷达的RFT处理,支持空间维度的目标分辨,提升抗干扰能力;
- 自适应参数调整:增加自适应速度搜索算法(如基于粗搜索-精搜索的两阶段策略),在保证分辨率的同时降低计算复杂度。
5.2 工程化落地建议
- 数据接口标准化:定义统一的实测数据输入格式(如XML或JSON配置文件+二进制数据),支持不同型号雷达的数据输入;
- 可视化工具集成:将结果可视化模块集成到GUI界面(如MATLAB App Designer或Qt),提供参数配置、结果显示、数据导出的一站式操作;
- 性能评估指标添加:增加目标检测概率、虚警率、参数估计误差等量化指标的计算模块,实现算法性能的自动评估;
- 鲁棒性优化:增加对雷达参数误差(如载频漂移、PRF抖动)的补偿机制,提升系统在实际工程环境中的鲁棒性。
六、总结
本RFT雷达信号处理系统通过模块化设计,实现了从信号仿真、预处理到相参积累、结果验证的全链路功能,核心优势在于解决了传统MTD在高速运动目标检测中的距离徙动与多普勒模糊问题。系统既支持算法层面的仿真验证(通过RFTfunctiontest.m),也支持工程层面的实测数据处理(通过RFTrealdatatest.m),为雷达运动目标检测技术的研究与工程应用提供了完整的解决方案。
后续可通过功能扩展与性能优化,进一步提升系统的适用性与实时性,推动RFT技术在无人机监测、低空安防、航空交通管制等领域的落地应用。