人工势场法换道主动避撞加mpc模型预测控制,carsim和simulink联合仿真,有规划和控制轨迹对比图。 跟踪误差良好,可以作为学习人工势场方法在自动驾驶汽车轨迹规划上的应用资料。
在自动驾驶领域,轨迹规划与控制是保障行车安全与高效的关键环节。今天来聊聊人工势场法换道主动避撞结合MPC(模型预测控制)的技术,以及使用Carsim和Simulink进行联合仿真的奇妙之旅。
人工势场法在换道主动避撞中的应用
人工势场法的核心思想是将车辆周围的环境看作是由各种势场组成,比如目标点产生吸引势场,障碍物产生排斥势场。车辆就像在这个虚拟的力场中运动的粒子,受到吸引和排斥力的共同作用来规划轨迹。
下面是一段简单的Python代码来示意人工势场法的基本计算逻辑(实际应用会复杂得多):
python
import numpy as np
# 车辆当前位置
vehicle_position = np.array([0, 0])
# 目标位置
goal_position = np.array([10, 10])
# 障碍物位置
obstacle_position = np.array([5, 5])
# 引力系数
k_att = 0.1
# 斥力系数
k_rep = 10
# 计算引力
def attractive_force(vehicle, goal):
return k_att * (goal - vehicle)
# 计算斥力
def repulsive_force(vehicle, obstacle):
dist = np.linalg.norm(vehicle - obstacle)
if dist < 1: # 设定一个影响范围
return k_rep * (1 / dist - 1) * (1 / dist ** 2) * (vehicle - obstacle)
else:
return np.array([0, 0])
att_force = attractive_force(vehicle_position, goal_position)
rep_force = repulsive_force(vehicle_position, obstacle_position)
total_force = att_force + rep_force
print("总作用力:", total_force)在这段代码里,attractiveforce**函数计算目标点对车辆的吸引力,repulsive force 函数计算障碍物对车辆的排斥力。最后将两者相加得到车辆受到的总作用力,以此来引导车辆的运动方向。
然而,人工势场法存在局部最小值等问题,可能导致车辆陷入无法到达目标点的困境。这时候,MPC就闪亮登场啦。
MPC模型预测控制来助力
MPC通过预测系统未来的行为,并根据预测结果在线优化控制输入,从而实现对系统的最优控制。在自动驾驶中,MPC能够动态地考虑车辆的运动学和动力学约束,有效弥补人工势场法的不足。
Simulink中有丰富的模块库可以帮助我们搭建MPC控制器。以一个简单的车辆纵向速度控制为例,我们可以构建如下的Simulink模型:
人工势场法换道主动避撞加mpc模型预测控制,carsim和simulink联合仿真,有规划和控制轨迹对比图。 跟踪误差良好,可以作为学习人工势场方法在自动驾驶汽车轨迹规划上的应用资料。
(此处假设一个简单的模型结构描述:有速度反馈模块获取当前车速,与目标速度做比较,差值输入到MPC控制器模块,MPC控制器输出控制量给车辆动力系统模块)
MPC控制器会不断预测车辆未来的速度,并调整控制输入,使车辆尽可能地跟踪目标速度。
Carsim与Simulink联合仿真
Carsim是一款专业的车辆动力学仿真软件,而Simulink则擅长控制系统建模与仿真。将两者联合起来,可以实现非常逼真的自动驾驶仿真。
在联合仿真中,Carsim负责提供精确的车辆动力学模型,包括轮胎特性、悬挂系统等细节。Simulink则用于搭建轨迹规划与控制系统,如刚才提到的人工势场法和MPC控制器。
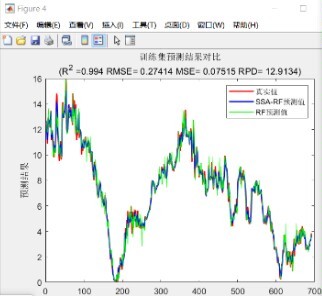
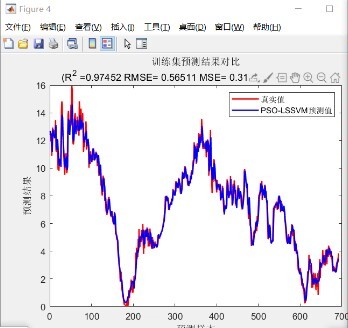
规划和控制轨迹对比图
通过联合仿真,我们得到了规划和控制轨迹对比图。从图中可以清晰地看到,人工势场法结合MPC规划出的轨迹能够有效地避开障碍物并朝着目标点前进。而且跟踪误差良好,这表明这种结合方法在自动驾驶汽车轨迹规划上具有很高的可行性和有效性。
这些成果不仅可以帮助我们更好地理解自动驾驶中的轨迹规划技术,也可以作为学习人工势场方法在自动驾驶汽车轨迹规划上应用的优质资料,希望能给同样在这个领域探索的小伙伴们一些启发。未来,随着技术的不断进步,相信自动驾驶的轨迹规划与控制会越来越精准和智能。