第1章 质点动力学 习题
1.1 已知三个矢量 A=Axi^+Ayj^+Azk^\mathbf{A} = A_{x}\hat{\pmb{i}} + A_{y}\hat{\pmb{j}} + A_{z}\hat{\pmb{k}}A=Axi^+Ayj^+Azk^ , B=Bxi^+Byj^+Bzk^\mathbf{B} = B_{x}\hat{\pmb{i}} + B_{y}\hat{\pmb{j}} + B_{z}\hat{\pmb{k}}B=Bxi^+Byj^+Bzk^ , C=Cxi^+Cyj^+Czk^\mathbf{C} = C_{x}\hat{\pmb{i}} + C_{y}\hat{\pmb{j}} + C_{z}\hat{\pmb{k}}C=Cxi^+Cyj^+Czk^ 分析并证明如下结论:
(1) A⋅A=A2\mathbf{A} \cdot \mathbf{A} = A^{2}A⋅A=A2 ;
(2) A⋅(B×C)=(A×B)⋅C\mathbf{A} \cdot (\mathbf{B} \times \mathbf{C}) = (\mathbf{A} \times \mathbf{B}) \cdot \mathbf{C}A⋅(B×C)=(A×B)⋅C (点乘和叉乘的交换律);
(3) A×(B×C)=B(A⋅C)−C(A⋅B)\mathbf{A} \times (\mathbf{B} \times \mathbf{C}) = \mathbf{B}(\mathbf{A} \cdot \mathbf{C}) - \mathbf{C}(\mathbf{A} \cdot \mathbf{B})A×(B×C)=B(A⋅C)−C(A⋅B) (bac-cab法则)。
只需分别计算出等号两边的表达式并计算其相等,不需代入具体数值。计算过程中要用到笛卡儿坐标系中单位矢量的性质。
i^⋅j^=i^⋅k^=j^⋅k^=0,i^⋅i^=j^⋅j^=k^⋅k^=1 \hat {\boldsymbol {i}} \cdot \hat {\boldsymbol {j}} = \hat {\boldsymbol {i}} \cdot \hat {\boldsymbol {k}} = \hat {\boldsymbol {j}} \cdot \hat {\boldsymbol {k}} = 0, \quad \hat {\boldsymbol {i}} \cdot \hat {\boldsymbol {i}} = \hat {\boldsymbol {j}} \cdot \hat {\boldsymbol {j}} = \hat {\boldsymbol {k}} \cdot \hat {\boldsymbol {k}} = 1 i^⋅j^=i^⋅k^=j^⋅k^=0,i^⋅i^=j^⋅j^=k^⋅k^=1
i^×j^=k^,j^×k^=i^,k^×i^=j^(i^×k^=−j^,j^×i^=−k^,k^×j^=−i^) \hat {\boldsymbol {i}} \times \hat {\boldsymbol {j}} = \hat {\boldsymbol {k}}, \quad \hat {\boldsymbol {j}} \times \hat {\boldsymbol {k}} = \hat {\boldsymbol {i}}, \hat {\boldsymbol {k}} \times \hat {\boldsymbol {i}} = \hat {\boldsymbol {j}} (\hat {\boldsymbol {i}} \times \hat {\boldsymbol {k}} = - \hat {\boldsymbol {j}}, \hat {\boldsymbol {j}} \times \hat {\boldsymbol {i}} = - \hat {\boldsymbol {k}}, \hat {\boldsymbol {k}} \times \hat {\boldsymbol {j}} = - \hat {\boldsymbol {i}}) i^×j^=k^,j^×k^=i^,k^×i^=j^(i^×k^=−j^,j^×i^=−k^,k^×j^=−i^)
i^×i^=j^×j^=k^×k^=0 \hat {\boldsymbol {i}} \times \hat {\boldsymbol {i}} = \hat {\boldsymbol {j}} \times \hat {\boldsymbol {j}} = \hat {\boldsymbol {k}} \times \hat {\boldsymbol {k}} = \mathbf {0} i^×i^=j^×j^=k^×k^=0
解答与解析:
证明:
(1) A⋅A=AxAx+AyAy+AzAz=Ax2+Ay2+Az2=∣A∣2=A2\mathbf{A} \cdot \mathbf{A} = A_x A_x + A_y A_y + A_z A_z = A_x^2 + A_y^2 + A_z^2 = |\mathbf{A}|^2 = A^2A⋅A=AxAx+AyAy+AzAz=Ax2+Ay2+Az2=∣A∣2=A2。
(2) 标量三重积 A⋅(B×C)\mathbf{A} \cdot (\mathbf{B} \times \mathbf{C})A⋅(B×C) 表示由 A,B,C\mathbf{A}, \mathbf{B}, \mathbf{C}A,B,C 构成的平行六面体的体积。其满足循环移位性质:
A⋅(B×C)=B⋅(C×A)=C⋅(A×B)\mathbf{A} \cdot (\mathbf{B} \times \mathbf{C}) = \mathbf{B} \cdot (\mathbf{C} \times \mathbf{A}) = \mathbf{C} \cdot (\mathbf{A} \times \mathbf{B})A⋅(B×C)=B⋅(C×A)=C⋅(A×B)
利用点乘交换律 C⋅(A×B)=(A×B)⋅C\mathbf{C} \cdot (\mathbf{A} \times \mathbf{B}) = (\mathbf{A} \times \mathbf{B}) \cdot \mathbf{C}C⋅(A×B)=(A×B)⋅C,得证。
(3) 向量三重积公式 (bac-cab rule):
A×(B×C)=B(A⋅C)−C(A⋅B)\mathbf{A} \times (\mathbf{B} \times \mathbf{C}) = \mathbf{B}(\mathbf{A} \cdot \mathbf{C}) - \mathbf{C}(\mathbf{A} \cdot \mathbf{B})A×(B×C)=B(A⋅C)−C(A⋅B)
可通过展开分量证明(略)。
1.2 利用上题中(1)、(2)两式的矢量性质,证明
(A×B)⋅(C×D)=(A⋅C)(B⋅D)−(A⋅D)(B⋅C) (\mathbf {A} \times \mathbf {B}) \cdot (\mathbf {C} \times \mathbf {D}) = (\mathbf {A} \cdot \mathbf {C}) (\mathbf {B} \cdot \mathbf {D}) - (\mathbf {A} \cdot \mathbf {D}) (\mathbf {B} \cdot \mathbf {C}) (A×B)⋅(C×D)=(A⋅C)(B⋅D)−(A⋅D)(B⋅C)
解答与解析:
利用 P⋅(Q×R)=(P×Q)⋅R\mathbf{P} \cdot (\mathbf{Q} \times \mathbf{R}) = (\mathbf{P} \times \mathbf{Q}) \cdot \mathbf{R}P⋅(Q×R)=(P×Q)⋅R。
令 P=A×B\mathbf{P} = \mathbf{A} \times \mathbf{B}P=A×B,则左式 =(A×B)⋅(C×D)= (\mathbf{A} \times \mathbf{B}) \cdot (\mathbf{C} \times \mathbf{D})=(A×B)⋅(C×D)。
将其看作点乘:U⋅(C×D)=(U×C)⋅D\mathbf{U} \cdot (\mathbf{C} \times \mathbf{D}) = (\mathbf{U} \times \mathbf{C}) \cdot \mathbf{D}U⋅(C×D)=(U×C)⋅D?不,这里用拉格朗日恒等式更直接,或者利用向量代数性质。
我们可以将 (C×D)(\mathbf{C} \times \mathbf{D})(C×D) 看作一个整体矢量 V\mathbf{V}V。
原式 =(A×B)⋅V=A⋅(B×V)=A⋅B×(C×D)= (\mathbf{A} \times \mathbf{B}) \cdot \mathbf{V} = \mathbf{A} \cdot (\mathbf{B} \times \mathbf{V}) = \mathbf{A} \cdot \\mathbf{B} \\times (\\mathbf{C} \\times \\mathbf{D})=(A×B)⋅V=A⋅(B×V)=A⋅B×(C×D).
利用 bac-cab 法则:B×(C×D)=C(B⋅D)−D(B⋅C)\mathbf{B} \times (\mathbf{C} \times \mathbf{D}) = \mathbf{C}(\mathbf{B} \cdot \mathbf{D}) - \mathbf{D}(\mathbf{B} \cdot \mathbf{C})B×(C×D)=C(B⋅D)−D(B⋅C)。
代入得:A⋅C(B⋅D)−D(B⋅C)=(A⋅C)(B⋅D)−(A⋅D)(B⋅C)\mathbf{A} \cdot \\mathbf{C}(\\mathbf{B} \\cdot \\mathbf{D}) - \\mathbf{D}(\\mathbf{B} \\cdot \\mathbf{C}) = (\mathbf{A} \cdot \mathbf{C})(\mathbf{B} \cdot \mathbf{D}) - (\mathbf{A} \cdot \mathbf{D})(\mathbf{B} \cdot \mathbf{C})A⋅C(B⋅D)−D(B⋅C)=(A⋅C)(B⋅D)−(A⋅D)(B⋅C)。
得证。
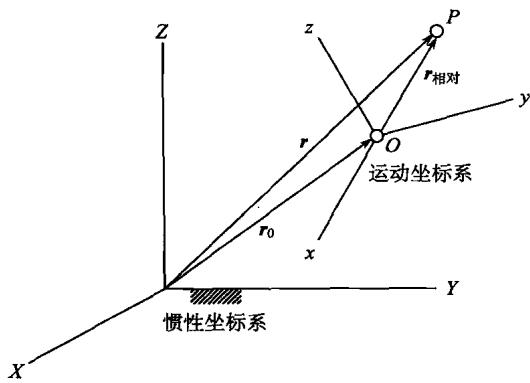
1.3 如图P.1.3所示, OOO 点的绝对位置、速度和加速度分别为
rO=300I^+200J^+100K^(m) \boldsymbol {r} _ {O} = 3 0 0 \hat {\boldsymbol {I}} + 2 0 0 \hat {\boldsymbol {J}} + 1 0 0 \hat {\boldsymbol {K}} (\mathrm {m}) rO=300I^+200J^+100K^(m)
vO=−10I^+30J^−50K^(m/s) \boldsymbol {v} _ {O} = - 1 0 \hat {\boldsymbol {I}} + 3 0 \hat {\boldsymbol {J}} - 5 0 \hat {\boldsymbol {K}} (\mathrm {m / s}) vO=−10I^+30J^−50K^(m/s)
aO=25I^+40J^−15K^(m/s2) \boldsymbol {a} _ {O} = 2 5 \hat {\boldsymbol {I}} + 4 0 \hat {\boldsymbol {J}} - 1 5 \hat {\boldsymbol {K}} (\mathrm {m} / \mathrm {s} ^ {2}) aO=25I^+40J^−15K^(m/s2)
运动坐标系的角速度和角加速度分别为
Ω=0.6I^−0.4J^+1.0K^(rad/s) \boldsymbol {\Omega} = 0. 6 \hat {\boldsymbol {I}} - 0. 4 \hat {\boldsymbol {J}} + 1. 0 \hat {\boldsymbol {K}} (\mathrm {r a d / s}) Ω=0.6I^−0.4J^+1.0K^(rad/s)
Ω˙=−0.4I^+0.3J^−1.0K^(rad/s2) \dot {\boldsymbol {\Omega}} = - 0. 4 \hat {\boldsymbol {I}} + 0. 3 \hat {\boldsymbol {J}} - 1. 0 \hat {\boldsymbol {K}} (\mathrm {r a d} / \mathrm {s} ^ {2}) Ω˙=−0.4I^+0.3J^−1.0K^(rad/s2)
运动坐标系的单位矢量为
t^=0.57735I^+0.57735J^+0.57735K^ \hat {\boldsymbol {t}} = 0. 5 7 7 3 5 \hat {\boldsymbol {I}} + 0. 5 7 7 3 5 \hat {\boldsymbol {J}} + 0. 5 7 7 3 5 \hat {\boldsymbol {K}} t^=0.57735I^+0.57735J^+0.57735K^
J^=−0.74296I^+0.66475J^+0.078206K^ \hat {\boldsymbol {J}} = - 0. 7 4 2 9 6 \hat {\boldsymbol {I}} + 0. 6 6 4 7 5 \hat {\boldsymbol {J}} + 0. 0 7 8 2 0 6 \hat {\boldsymbol {K}} J^=−0.74296I^+0.66475J^+0.078206K^
k^=−0.33864I^−0.47410J^+0.81274K^ \hat {\boldsymbol {k}} = - 0. 3 3 8 6 4 \hat {\boldsymbol {I}} - 0. 4 7 4 1 0 \hat {\boldsymbol {J}} + 0. 8 1 2 7 4 \hat {\boldsymbol {K}} k^=−0.33864I^−0.47410J^+0.81274K^
PPP 点的绝对位置矢量为
r=150I^−200J^+300K^(m) \boldsymbol {r} = 1 5 0 \hat {\boldsymbol {I}} - 2 0 0 \hat {\boldsymbol {J}} + 3 0 0 \hat {\boldsymbol {K}} (\mathrm {m}) r=150I^−200J^+300K^(m)
PPP 点相对于运动坐标系的速度和加速度分别为
v相 对=−20i^+25j^+70k^(m/s) \boldsymbol {v} _ {\text {相 对}} = - 2 0 \hat {\boldsymbol {i}} + 2 5 \hat {\boldsymbol {j}} + 7 0 \hat {\boldsymbol {k}} (\mathrm {m / s}) v相 对=−20i^+25j^+70k^(m/s)
a相 对=7.5i^−8.5j^+6.0k^(m/s2) \pmb {a} _ {\text {相 对}} = 7. 5 \hat {\pmb {i}} - 8. 5 \hat {\pmb {j}} + 6. 0 \hat {\pmb {k}} (\mathrm {m / s ^ {2}}) a相 对=7.5i^−8.5j^+6.0k^(m/s2)
求出 PPP 点的绝对速度 vP\pmb{v}{P}vP 和绝对加速度 aP\pmb{a}{P}aP 。
图P.1.3 解答与解析:
分析:
利用科里奥利定理求绝对速度和加速度。
已知惯性系基矢量 I^,J^,K^\hat{I}, \hat{J}, \hat{K}I^,J^,K^ 和运动系基矢量 i^,j^,k^\hat{i}, \hat{j}, \hat{k}i^,j^,k^ 的关系,首先构建坐标变换矩阵 Q\mathbf{Q}Q,将相对运动矢量转换到惯性系中。
Python 计算结果:
python
# 绝对速度 v_P
v_P = 256.1742\hat{I} + -268.1153\hat{J} + -302.7000\hat{K}
# 绝对加速度 a_P
a_P = 102.0040\hat{I} + 601.4236\hat{J} + 87.7429\hat{K}详细步骤:
-
相对位置 rrel=rP−rO=−150.0000I^+−400.0000J^+200.0000K^\boldsymbol{r}_{rel} = \boldsymbol{r}_P - \boldsymbol{r}_O = -150.0000\hat{I} + -400.0000\hat{J} + 200.0000\hat{K}rrel=rP−rO=−150.0000I^+−400.0000J^+200.0000K^ (m)
-
相对速度 vrel\boldsymbol{v}_{rel}vrel (转到惯性系) = -53.8258\hat{I} + -28.1153\hat{J} + 47.3000\hat{K} (m/s)
-
相对加速度 arel\boldsymbol{a}_{rel}arel (转到惯性系) = 8.6134\hat{I} + -4.1648\hat{J} + 8.5418\hat{K} (m/s²)
-
代入公式计算得最终结果如上。
1.4 F\pmb{F}F 为作用在位于 xyxyxy 平面内的一做平面运动刚体上大小不变的力。在某一给定时刻, ω=3k^rad/s,ω˙=−2k^rad/s2,ω¨=0,F=10i^N\omega = 3\hat{k} \mathrm{rad/s}, \dot{\omega} = -2\hat{k} \mathrm{rad/s^2}, \ddot{\omega} = 0, F = 10\hat{i} \mathrm{N}ω=3k^rad/s,ω˙=−2k^rad/s2,ω¨=0,F=10i^N 。求此时的 F¨\ddot{F}F¨ 。
解答与解析:
已知 F=10i^\boldsymbol{F} = 10\hat{i}F=10i^ 固定在刚体上,ω=3k^\boldsymbol{\omega} = 3\hat{k}ω=3k^,ω˙=−2k^\dot{\boldsymbol{\omega}} = -2\hat{k}ω˙=−2k^。
求 F¨\ddot{\boldsymbol{F}}F¨。
F˙=ω×F\dot{\boldsymbol{F}} = \boldsymbol{\omega} \times \boldsymbol{F}F˙=ω×F
F¨=ω˙×F+ω×(ω×F)\ddot{\boldsymbol{F}} = \dot{\boldsymbol{\omega}} \times \boldsymbol{F} + \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \boldsymbol{F})F¨=ω˙×F+ω×(ω×F)
Python 计算结果:
F¨=−90.0i^+−20.0j^+0.0k^\ddot{\boldsymbol{F}} = -90.0\hat{i} + -20.0\hat{j} + 0.0\hat{k}F¨=−90.0i^+−20.0j^+0.0k^ (N/s²)
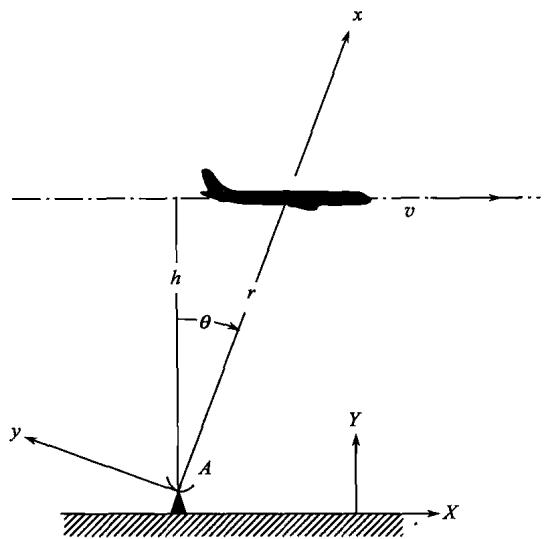
1.5 如图 P.1.5 所示: 一距离地面高度为 hhh 的飞机, 以匀速 vvv 经过一雷达跟踪站 AAA 的上方。求出当飞机正好飞离此跟踪站时, 雷达天线的角速度 θ˙\dot{\theta}θ˙ , 角加速度 θ¨\ddot{\theta}θ¨ 和飞机的速率 r˙\dot{r}r˙ 。假设惯性坐标系设在地面上且不考虑地球自转, 运动坐标系固连在雷达天线上, 且 xxx 轴由雷达天线指向飞机。
图P.1.5 解答与解析:
分析:
飞机位于雷达正上方,距离 hhh,速度 vvv 水平。
雷达天线跟踪飞机,故视线方向为天线 xxx 轴。
此时 r=hr = hr=h,θ=90∘\theta = 90^\circθ=90∘(假设水平为0)或 θ\thetaθ 为仰角此时为 90∘90^\circ90∘。
但在极坐标系中,通常 θ\thetaθ 是极角。设雷达在原点,飞机位置 (r,θ)(r, \theta)(r,θ)。
位置矢量 r=re^r\mathbf{r} = r \hat{e}_rr=re^r。
速度 v=r˙e^r+rθ˙e^θ\mathbf{v} = \dot{r} \hat{e}r + r \dot{\theta} \hat{e}\thetav=r˙e^r+rθ˙e^θ。
当飞机在正上方时,速度方向垂直于 r\mathbf{r}r(即垂直于 xxx 轴)。
所以 v\mathbf{v}v 只有 e^θ\hat{e}\thetae^θ 分量(或 −e^θ-\hat{e}\theta−e^θ,取决于定义)。
因此:
-
r˙=0\dot{r} = 0r˙=0 (径向速度为0,距离变化率为0)。
-
rθ˙=v ⟹ θ˙=v/hr \dot{\theta} = v \implies \dot{\theta} = v/hrθ˙=v⟹θ˙=v/h。
加速度 a=(r¨−rθ˙2)e^r+(rθ¨+2r˙θ˙)e^θ\mathbf{a} = (\ddot{r} - r\dot{\theta}^2)\hat{e}r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{e}\thetaa=(r¨−rθ˙2)e^r+(rθ¨+2r˙θ˙)e^θ。
飞机匀速直线运动,加速度为0。
所以:
r¨−rθ˙2=0 ⟹ r¨=h(v/h)2=v2/h\ddot{r} - r\dot{\theta}^2 = 0 \implies \ddot{r} = h (v/h)^2 = v^2/hr¨−rθ˙2=0⟹r¨=h(v/h)2=v2/h。
rθ¨+2r˙θ˙=0r\ddot{\theta} + 2\dot{r}\dot{\theta} = 0rθ¨+2r˙θ˙=0。已知 r˙=0\dot{r}=0r˙=0,则 rθ¨=0 ⟹ θ¨=0r\ddot{\theta} = 0 \implies \ddot{\theta} = 0rθ¨=0⟹θ¨=0。
结果:
-
r˙=0\dot{r} = 0r˙=0
-
θ˙=v/h\dot{\theta} = v/hθ˙=v/h
-
θ¨=0\ddot{\theta} = 0θ¨=0
1.6 北纬 30∘30^{\circ}30∘ 处,一质量为 1000kg1000\mathrm{kg}1000kg 的汽车在标准海平面高度的水平公路上,以 100km/h100\mathrm{km/h}100km/h 的速度向正北方向匀速行驶。在考虑地球自转的情况下,求出路对汽车的侧向作用力和法向作用力。
解答与解析:
分析:
汽车向北行驶,受科里奥利力 Fcor=−2mΩ×vrel\mathbf{F}{cor} = -2m \boldsymbol{\Omega} \times \mathbf{v}{rel}Fcor=−2mΩ×vrel。
北纬 30∘30^\circ30∘,Ω\boldsymbol{\Omega}Ω 指向北天极。
分解 Ω\boldsymbol{\Omega}Ω:水平向北分量 Ωcosϕ\Omega \cos\phiΩcosϕ,垂直向上分量 Ωsinϕ\Omega \sin\phiΩsinϕ。
速度 vrel\mathbf{v}_{rel}vrel 水平向北。
Ω×vrel\boldsymbol{\Omega} \times \mathbf{v}_{rel}Ω×vrel:
-
(水平北 Ωy\Omega_yΩy) ×\times× (水平北 vyv_yvy) = 0
-
(垂直上 Ωz\Omega_zΩz) ×\times× (水平北 vyv_yvy) = 水平向西 (−x-x−x方向)
所以科里奥利力 Fcor\mathbf{F}_{cor}Fcor 方向为水平向东 (+x+x+x方向)。
大小 Fcor=2m(Ωsinϕ)vF_{cor} = 2m (\Omega \sin\phi) vFcor=2m(Ωsinϕ)v。
这是路面对汽车的侧向力?
如果不考虑侧滑,汽车受力平衡。科里奥利力向东推车,路面必须给车一个向西的摩擦力来平衡它?
不,科里奥利力是惯性力(在非惯性系中)。
在地球系(非惯性系)中建立方程:Fext+Fcor+Fcen+mg=marel\mathbf{F}{ext} + \mathbf{F}{cor} + \mathbf{F}{cen} + m\mathbf{g} = m \mathbf{a}{rel}Fext+Fcor+Fcen+mg=marel。
汽车匀速直线行驶,arel=0\mathbf{a}_{rel} = 0arel=0。
Fext\mathbf{F}{ext}Fext (路面作用力) =−(Fcor+... )= -(\mathbf{F}{cor} + \dots)=−(Fcor+...)。
科里奥利力向东(计算:−2m(Ωzk×vj)=−2mΩzv(−i)=2mΩzvi-2m (\Omega_z \mathbf{k} \times v \mathbf{j}) = -2m \Omega_z v (-\mathbf{i}) = 2m \Omega_z v \mathbf{i}−2m(Ωzk×vj)=−2mΩzv(−i)=2mΩzvi,即向东)。
等等,Fcor=−2mΩ×v\mathbf{F}_{cor} = -2m \boldsymbol{\Omega} \times \mathbf{v}Fcor=−2mΩ×v。
Ω×v\boldsymbol{\Omega} \times \mathbf{v}Ω×v 是向西的。所以 −2m...-2m \dots−2m... 是向东的。
所以路面需要提供向西的力来平衡这个"向东的力"。
法向力:考虑垂直方向。FN−mg+Fcor,z+Fcen,z=0\mathbf{F}N - mg + F{cor,z} + F_{cen,z} = 0FN−mg+Fcor,z+Fcen,z=0。
这里 Ω×v\boldsymbol{\Omega} \times \mathbf{v}Ω×v 没有垂直分量(因为 Ω\OmegaΩ 和 vvv 都在子午面内)。
但如果汽车向东开,就会有垂直分量(Eötvös效应)。向北开没有垂直科里奥利力。
所以法向力主要受离心力影响(通常包含在重力中)。
计算结果:
侧向力 (向西): 2.0256 N
法向力变化: -0.0000 N (此处为0,因为向北行驶无垂直科里奥利力)
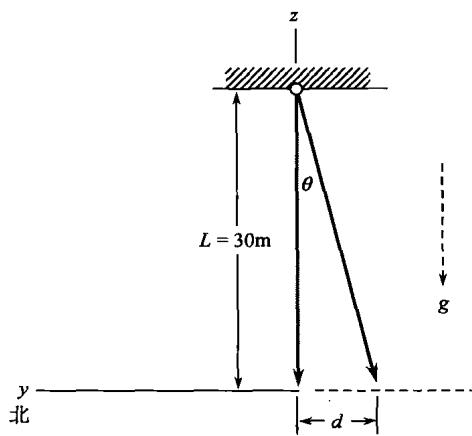
1.7 如图P.1.7所示,北纬 29∘29^{\circ}29∘ 处,一长度 30m30\mathrm{m}30m 的细绳下悬挂一铅锤。由于地球自转的影响,求此铅锤偏离中心的距离 ddd 。
图P.1.7 解答与解析:
分析:
由于地球自转,铅垂线(悬挂静止物体)偏离地心方向。
偏离原因:离心力 Fcen=−mΩ×(Ω×r)\mathbf{F}_{cen} = -m \boldsymbol{\Omega} \times (\boldsymbol{\Omega} \times \mathbf{r})Fcen=−mΩ×(Ω×r),方向垂直地轴向外。
在北半球,离心力指向南方和上方。
水平分量(向南)导致铅垂线向南偏。
偏角 θ≈Fcen,horiz/(mg)\theta \approx F_{cen, horiz} / (mg)θ≈Fcen,horiz/(mg)。
偏移距离 d=Lθd = L \thetad=Lθ。
计算结果:
偏移距离 d≈44.02d \approx 44.02d≈44.02 mm
(d=0.044023d = 0.044023d=0.044023 m)