毫米波雷达技术概述:频段演进与FMCW原理
毫米波雷达(30-300GHz)在汽车领域形成了三大核心频段:77-79GHz(智驾主力,高分辨率远程感知)、60GHz(舱内生命体征监测,隐私友好)、24GHz(低成本近场应用)。FMCW(调频连续波)是其核心技术,通过发射线性调频信号(Chirp)并分析回波差频,经三次FFT变换实现距离、速度、角度测量:Range FFT提取距离信息(分辨率与带宽成反比),Doppler FFT通过相位差检测速度,Angle FFT利用天线阵列解算方位。该技术将射频信号转化为点云数据,支撑自动驾驶环境感知。
毫米波雷达概论
1.1 全频谱解析:从 24GHz 到 79GHz 的演进与分工
毫米波(Millimeter Wave, mmWave)通常指波长在 1mm 到 10mm 之间的电磁波,对应频率 30GHz 到 300GHz。
在汽车领域,经过数十年的博弈与法规演进,最终沉淀出了三个核心频段:77-79 GHz、60 GHz 和 24 GHz。它们就像三支特种部队,分别负责室外远程、舱内精密感知和车身近场探测。
- 77-79 GHz:室外智驾专属(The Outdoor King)
这是目前 L2+ 及 L3 自动驾驶的核心频段,被称为汽车雷达的"黄金频段"。
-
物理特性:
-
波长短 (~3.9mm):相比 24GHz,天线尺寸缩小了约 1/3。这意味着在同样大小的芯片封装或 PCB 面积上,我们可以集成更多的 TX/RX 通道(如 12TX16RX),这是实现 4D 成像 的物理基础。
-
高带宽 (High Bandwidth):
-
77 GHz (76-77GHz):主要用于长距离前向雷达 (LRR),带宽通常为 1GHz,足以提供米级的距离分辨率。
-
79 GHz (77-81GHz):这是未来的方向。拥有高达 4GHz 的超大带宽。根据距离分辨率公式 ΔR=c/2BΔR=c/2B,4GHz 带宽能带来约 3.75cm 的极致分辨率。这使得雷达不仅能看到"前面有障碍物",还能看清"是路边的护栏还是行人的腿"。
-
应用场景:
-
前向雷达 (LRR):ACC (自适应巡航)、AEB (自动紧急制动)。
-
角雷达 (SRR):BSD (盲区监测)、LCA (变道辅助)。
-
4D 成像雷达:高阶智驾感知。
-
工程师笔记:全球法规正在强制将 24GHz 超宽带(UWB)迁移至 77/79GHz。如果你正在开发一款面向 2025 年的智驾系统,请毫不犹豫地选择 77/79GHz 平台。

- 60 GHz:舱内感知新贵(The Cabin Queen)
当雷达进入车内,它面临的挑战不再是数百米的距离,而是对隐私的尊重和对微小动作的捕捉。60GHz 频段(V-Band)因此脱颖而出。
-
物理特性:
-
大气衰减极大:60GHz 处于氧气吸收的峰值频率。这意味着信号在空气中衰减极快。
-
缺点:传不远,做不了远程雷达。
-
优点:天然的隔离墙。车内的 60GHz 信号很难穿透车窗干扰到车外的雷达;反之,车外的信号也干扰不到车内。这对电磁兼容(EMC)设计是天大的好消息。
-
高敏感度:波长约 5mm,对微小的位移(如 0.5mm 的胸腔起伏)极为敏感,非常适合做非接触式生命体征检测。
-
应用场景:
-
CPD (儿童存在检测):透过毛毯检测婴儿呼吸。
-
DMS (驾驶员监控):心率、呼吸率监测。
-
手势识别:高带宽带来的高手势分辨力。
-
核心优势:隐私 (Privacy)。在欧美市场,用户非常抗拒车内摄像头(担心黑客偷窥)。60GHz 雷达输出的是点云和特征,既能保命(防儿童遗忘),又不侵犯隐私,是替代 RGB 摄像头的最佳方案。
- 24 GHz:曾经的王者,现在的边缘(The Fading Veteran)
在 2018 年之前,24GHz 是角雷达(BSD)的绝对主流。但随着频谱资源的重新分配,它正在退守到特定的细分领域。
-
频谱分裂:
-
24 GHz ISM (窄带):带宽仅 250MHz (24.0-24.25GHz)。这是工业/科/医通用频段,全球免费,无需授权。
-
24 GHz UWB (超宽带):带宽曾达 5GHz,但因干扰射电天文,已被欧美法规在 2022 年后禁止用于新车雷达。
-
物理特性:
-
波长较长 (~12.5mm),绕射能力稍强,对保险杠喷漆工艺的要求不如 77GHz 那么苛刻。
-
成本极低,供应链极其成熟。
-
应用场景:
-
门雷达 (Door Radar):探测开门范围内的石墩、骑行者。
-
脚踢传感器 (Kick Sensor):利用多普勒效应检测踢腿动作,控制电动尾门。
-
低端 BSD:在部分法规宽松的新兴市场(如部分东南亚、南美国家),低成本车型仍在使用 24GHz 窄带做盲区监测。
-
工程师笔记:不要试图用 24GHz 窄带(ISM)去做高性能智驾。250MHz 的带宽意味着距离分辨率只有 0.6米。如果是两辆车前后距离小于 0.6米,24G 窄带雷达会把它们看成一个物体。它只适合做简单的"有/无"检测或近场避障。
一张表看懂全频谱战略
| 频段 | 核心优势 | 核心劣势 | 典型带宽 | 距离分辨率 | 主流应用 | 状态 |
|---|---|---|---|---|---|---|
| 77-79 GHz | 小尺寸、高分辨、长距离 | 对 PCB 工艺和天线罩要求极高 | 1 GHz / 4 GHz | 4 cm (at 4G BW) | L2+ 智驾, 4D 成像 | 绝对主流 |
| 60 GHz | 隐私保护、抗干扰、高敏感 | 穿透力差,大气衰减大 | 4 GHz (57-64G) | ~4 cm | 舱内 CPD, 手势, 心率 | 快速增长 |
| 24 GHz (ISM) | 成本极低、全球通用、工艺简单 | 分辨率极差、天线尺寸大 | 0.25 GHz | 60 cm | 门雷达, 尾门脚踢 | 利基市场 |
通过这一节,我们确立了本书的技术基调:根据场景选频率。
-
要看清 200 米外的车,选 77GHz。
-
要看清后座婴儿的呼吸,选 60GHz。
-
要检测脚有没有踢一下保险杠,选 24GHz。
1.2 FMCW 体制精讲:从 Chirp 到 3D 感知
想象一只蝙蝠,它不是发出"吱"的一声短促尖叫(脉冲),而是发出一段声调从低到高滑动的长啸:"呜------吁------"。这就是 FMCW 的灵魂 ------ Chirp (线性调频脉冲)。
- Chirp 信号:时间的尺子
-
定义:一个频率随时间线性增加的正弦波。
-
起始频率:fcfc (例如 77 GHz)
-
带宽:BB (例如 4 GHz)
-
持续时间:TcTc (例如 40 μsμs)
-
斜率 (Slope):S=B/TcS=B/Tc
-
物理图景:在"频率-时间 (f-t)"图中,Chirp 是一条斜线。这条斜线的斜率 SS 是我们在后续计算中最重要的常数。
- 混频 (Mixing):化繁为简的艺术
雷达发射一个 Chirp,碰到物体反射回来一个延迟的 Chirp。
-
TX (发射信号):频率 ftx(t)ftx(t)
-
RX (接收信号):频率 frx(t)frx(t)。由于飞行时间 ττ,接收信号在时间上滞后,导致在同一时刻,RX 的频率比 TX 低一点点。
-
混频器 (Mixer):将 TX 和 RX 信号相乘并低通滤波。
-
输出:中频信号 (IF Signal)。
-
神奇之处:虽然 TX 和 RX 都是 77GHz 的高频信号,但它们的差频 (Beat Frequency) fIF=ftx−frxfIF=ftx−frx 却处于 MHz 级别(人耳甚至能听到的频率范围)。
-
结论:混频器把"纳秒级的时间延迟"转化为了"赫兹级的频率差"。测量频率比测量时间容易得多。
- 三大要素的物理推导
A. 测距 (Range) ------ 频率代表距离
-
原理: 物体越远 →→ 回波延迟时间 ττ 越长 →→ 频率-时间图中 TX 和 RX 两条斜线的垂直间距(频率差)越大。
-
推导:
-
延迟时间 τ=2Rcτ=c2R (2R2R 是往返距离)。
-
频率差 fIF=S×τfIF=S×τ (斜率 ×× 时间)。
-
联立解得: f_{IF} = \\frac{2S}{c} R \\quad \\Rightarrow \\quad R = \\frac{c \\cdot f_{IF}}{2S}
-
物理意义:
-
对 IF 信号做一次 FFT(快速傅里叶变换),得到频谱。频谱上的每一个峰(Peak),其频率位置直接对应目标的距离。
-
距离分辨率:ΔR=c/2BΔR=c/2B。带宽 BB 越大,分辨能力越强。
B. 测速 (Velocity) ------ 相位代表速度
FMCW 的精髓在于它极其擅长测速,且能区分静止和运动物体。这里利用了多普勒效应 (Doppler Effect),但在微观上表现为相位旋转。
-
原理:
-
雷达通常会连续发射一串 Chirp(例如 128 个),这称为一个 Frame (帧)。
-
对于一个微小移动的物体(如 v=1m/sv=1m/s),在两个相邻 Chirp 的间隔时间 TcTc 内,物体移动了微小的距离 Δd=v⋅TcΔd=v⋅Tc。
-
这个微小的距离变化,会导致回波信号产生一个微小的相位差 (Phase Shift) ΔϕΔϕ。
-
推导:
-
相位变化 Δϕ=4πΔdλ=4πvTcλΔϕ=λ4πΔd=λ4πvTc。
-
通过对比连续多个 Chirp 在同一距离单元上的相位变化,我们可以算出 vv。
-
处理方法:对这 128 个 Chirp 的数据(在同一 Range Bin 上)做第二次 FFT (Doppler FFT)。
-
物理意义:
-
速度分辨率:取决于一帧的总时长(Chirp 数 ×Tc×Tc)。观测时间越长,测速越准。
-
最大不模糊速度:λ/(4Tc)λ/(4Tc)。如果物体跑得太快,相位旋转超过 180°,就会出现"速度模糊"(比如把远离看成靠近)。
C. 测角 (Angle) ------ 阵列代表角度
单根天线是无法知道物体在左边还是右边的。我们需要天线阵列 (Antenna Array)。
-
原理:
-
假设有两根接收天线 RX1 和 RX2,间距为 dd (通常为 λ/2λ/2)。
-
当信号从角度 θθ 射入时,到达 RX2 的路程比 RX1 多了 dsin(θ)dsin(θ)。
-
这一小段路程差会引起两根天线接收信号的相位差 ωω。
-
推导:
-
相位差 ω=2π⋅dsin(θ)λω=λ2π⋅dsin(θ)。
-
反解角度: \\theta = \\arcsin(\\frac{\\lambda \\cdot \\omega}{2\\pi d})
-
处理方法:
-
对多个接收天线(RX1, RX2, ... RXn)的数据做第三次 FFT (Angle FFT)。
-
FFT 的峰值位置对应目标的角度。
-
物理意义:
-
MIMO 技术:为了提高角度分辨率(让图像更清晰),我们不仅增加 RX,还利用多个 TX 轮流发射,构建虚拟孔径。比如 3TX + 4RX = 12 虚拟通道,相当于一个 12 根天线的大雷达。
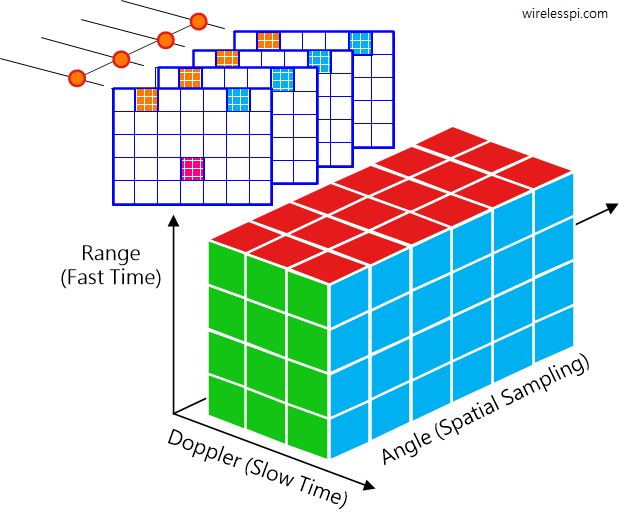
总结:从 ADC 数据到点云的"三板斧"
雷达芯片内部的 DSP 实际上就在疯狂地做 FFT:
-
ADC 采样 →→ 得到时域数据。
-
Range FFT (1D-FFT):
-
输入:一个 Chirp 的采样点。
-
输出:距离信息。
-
Doppler FFT (2D-FFT):
-
输入:一帧内 128 个 Chirp 的同一距离点。
-
输出:速度信息。
-
产物:Range-Doppler Map (RD 图)。
-
Angle FFT (3D-FFT):
-
输入:不同天线通道的同一 (距离, 速度) 点。
-
输出:角度信息。
最终,经过这三次变换,原本杂乱无章的电压信号,就被解算成了我们熟悉的点云格式:(x,y,z,v,SNR)(x,y,z,v,SNR)。