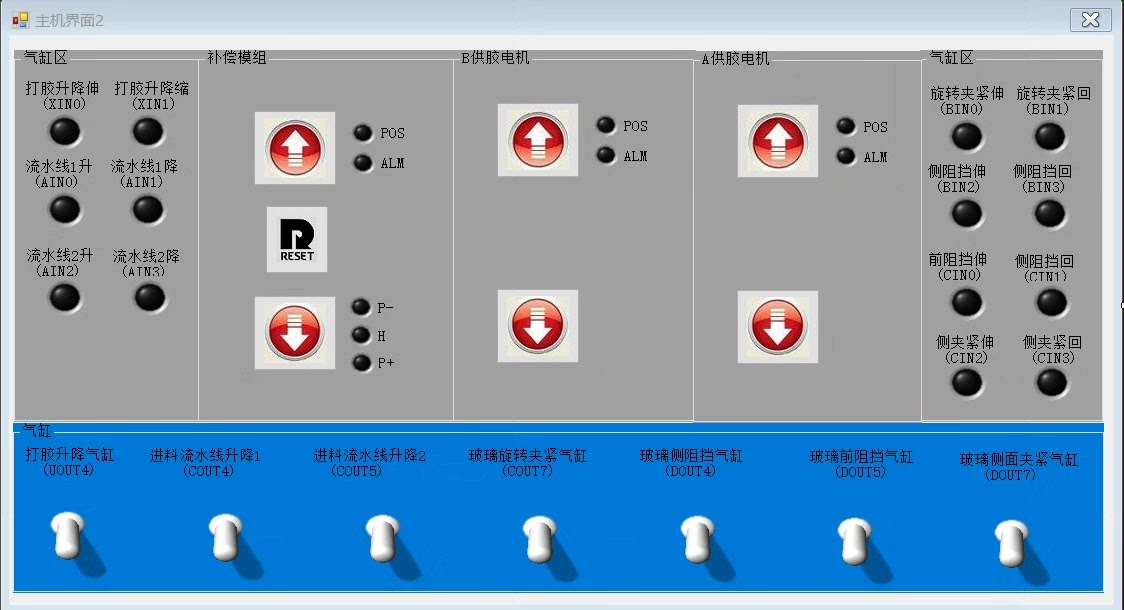
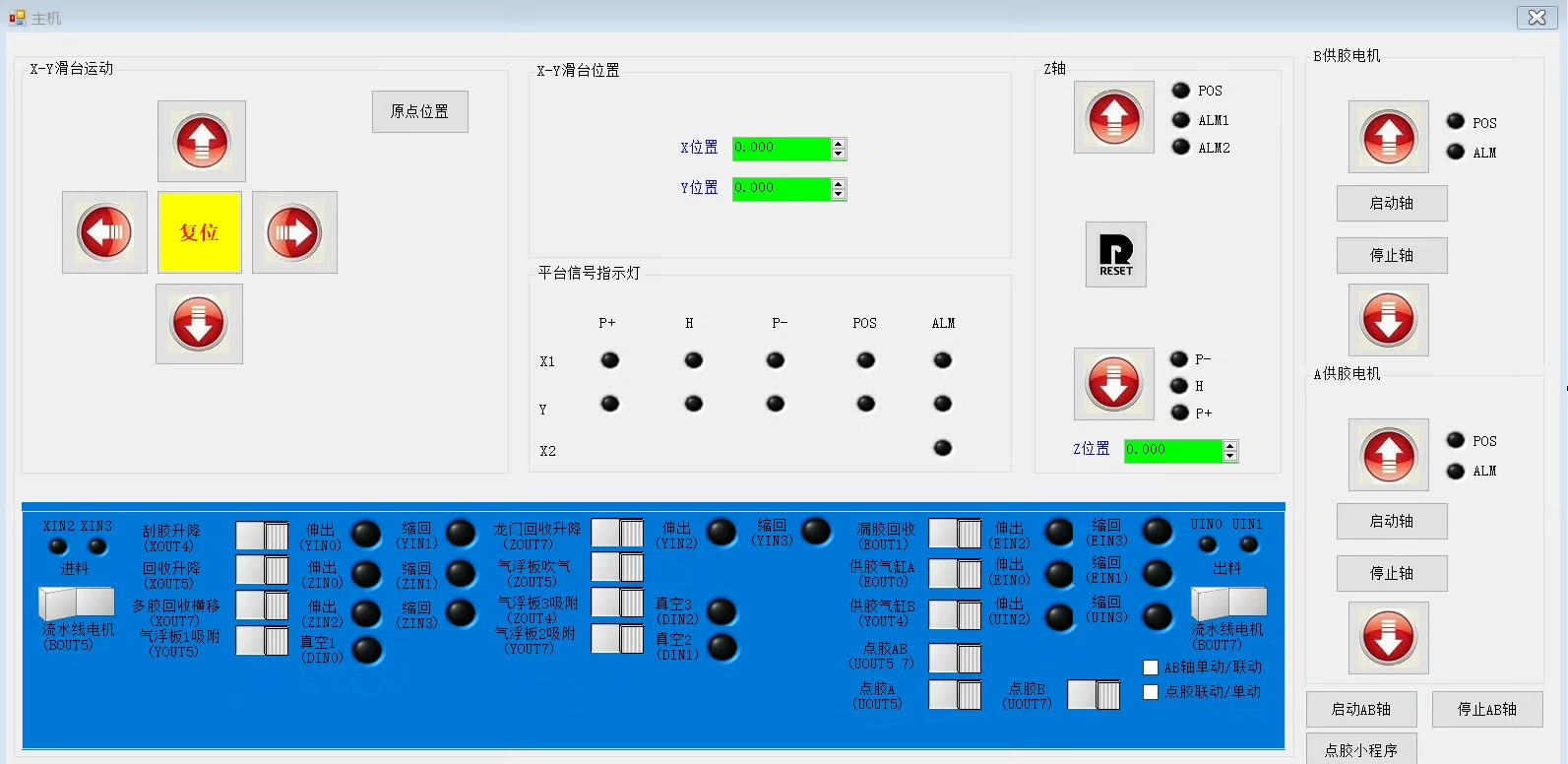
AB胶刮胶机 1、上位机C#编写; 2、研华运动控制卡; 3、研华运动控制卡龙门功能和插补功能; 4、板卡项目很好的借鉴程序;
在自动化设备领域,AB胶刮胶机的精准控制至关重要。今天咱们就来唠唠如何借助C#编写上位机,搭配研华运动控制卡来实现高效的AB胶刮胶功能。
C#上位机:人机交互的窗口
使用C#编写上位机,是因为它有着丰富的类库和便捷的开发环境。咱们先看一段简单的初始化代码:
csharp
using System;
using System.Windows.Forms;
namespace ABGlueScraperUI
{
public partial class MainForm : Form
{
public MainForm()
{
InitializeComponent();
}
}
}这里通过using引入必要的命名空间,然后在MainForm类的构造函数里调用InitializeComponent()方法初始化界面组件。这个界面将成为我们与AB胶刮胶机交互的窗口,操作人员可以在这里设置刮胶速度、轨迹等参数。
研华运动控制卡:核心驱动力
研华运动控制卡是整个AB胶刮胶机运动控制的核心。它提供了强大的龙门功能和插补功能。
龙门功能
龙门功能允许两个或多个轴协同运动,就像龙门起重机的横梁和两侧的立柱一样配合默契。在代码中,我们可以这样初始化龙门模式(假设使用的是研华特定的SDK):
csharp
using Advantech.Adam;
class MotionController
{
public void InitGantryMode()
{
AdamAxes axis1 = new AdamAxes(0);
AdamAxes axis2 = new AdamAxes(1);
axis1.Mode = AxisMode.Gantry;
axis2.Mode = AxisMode.Gantry;
axis1.GantryMaster = true;
axis2.GantryMaster = false;
}
}这里我们创建了两个轴对象axis1和axis2,并将它们的模式设置为龙门模式,指定axis1为龙门主轴,axis2跟随运动。这样在刮胶过程中,比如需要横向和纵向同时移动刮胶头时,就能保证精确的同步。
插补功能
插补功能则是让运动控制更加平滑和精准。比如在刮胶过程中需要绘制曲线轨迹,插补功能就派上用场了。以下是一个简单的直线插补示例代码(基于研华SDK简化):
csharp
public void LinearInterpolation(double startX, double startY, double endX, double endY)
{
double steps = Math.Abs(endX - startX) > Math.Abs(endY - startY)? Math.Abs(endX - startX) : Math.Abs(endY - startY);
double dx = (endX - startX) / steps;
double dy = (endY - startY) / steps;
for (int i = 0; i < steps; i++)
{
double currentX = startX + i * dx;
double currentY = startY + i * dy;
// 这里调用研华运动控制卡的移动函数将轴移动到currentX和currentY位置
}
}代码中,我们首先计算出需要移动的步数steps,然后算出每步在X和Y方向上的增量dx和dy。通过循环逐步移动到目标位置,实现直线插补,确保刮胶头能沿着设定的直线轨迹精确移动。
板卡项目的借鉴程序
对于初次接触这个项目的开发者来说,板卡项目的借鉴程序是个宝贵的资源。这些程序通常包含了基本的初始化、运动控制指令等代码片段。比如上面提到的龙门功能和插补功能的代码,很可能在借鉴程序里就有更完整的版本,包括错误处理、参数配置等。
AB胶刮胶机 1、上位机C#编写; 2、研华运动控制卡; 3、研华运动控制卡龙门功能和插补功能; 4、板卡项目很好的借鉴程序;
我们可以将借鉴程序里已经成熟的代码模块进行整合,根据AB胶刮胶机的具体需求进行微调。例如,如果借鉴程序里的插补功能是针对通用机械臂的,我们可以调整参数,使其适用于AB胶刮胶头的运动范围和精度要求。
总之,通过C#编写的上位机和研华运动控制卡的强大功能组合,再借助板卡项目的借鉴程序,我们能够打造出高效、精准的AB胶刮胶机控制系统。