📖 项目背景
三个项目的传承关系
要理解 PP-Claw,首先要了解它的"家族谱系":

🦞 OpenClaw (小龙虾)是一个功能极其强大的开源个人 AI 助手,用 TypeScript 编写,代码量高达 430,000+ 行。它支持 WhatsApp、Telegram、Slack、Discord、Signal、iMessage 等 20+ 聊天平台,具备语音交互、Canvas 渲染、多 Agent 协作等企业级能力。OpenClaw 的 Logo 是一只龙虾 🦞,项目名中的 "Claw" 就是"爪子"的意思。
🐈 Nanobot (纳米机器人)受 OpenClaw 启发而生,是它的超轻量 Python 复刻版 。Nanobot 的作者观察到 OpenClaw 虽强大但过于庞大(430K+ 行代码),对于研究和学习门槛太高,于是用 ~4,000 行 Python 核心代码(仅 OpenClaw 的 1%!)实现了其大部分核心功能:多渠道接入、MCP 协议、记忆系统、技能扩展、定时任务等。Nanobot 证明了 AI Agent 不需要那么复杂。
🦐 PP-Claw(皮皮虾) 则是在深入研究 Nanobot 源码后,用 Go 语言对 Nanobot 进行的 1:1 完整复刻。之所以叫"皮皮虾",是延续了 OpenClaw "甲壳类动物" 的命名传统------OpenClaw 是龙虾 🦞,PP-Claw 就做虾界最凶猛的皮皮虾(学名:螳螂虾)🦐。
为什么要再用 Go 重写一遍?
动机很朴素:
- 部署繁琐:Python 的运行时依赖(虚拟环境、pip 包管理、解释器版本兼容等)让部署变成一件痛苦的事
- 设备受限:在树莓派、安卓 Termux、RISC-V 开发板等资源受限设备上,Python 生态水土不服
- 天然适配 :Go 编译后只有一个二进制文件,
scp过去就能跑,天然适合嵌入式和边缘部署场景
还有一点就是相对 Python 来说,我更喜欢Go语言,所以就用Go语言重写了一遍。
PP-Claw 是 Nanobot 的 Go 语言完整复刻版,模块划分、接口设计、配置结构全部与 Python 原版一一对齐,同时借助 Go 的并发优势和字节跳动开源的 Eino ADK,在代码量上实现了进一步精简。
三者的代码量对比
| 项目 | 语言 | 核心代码量 | 定位 |
|---|---|---|---|
| 🦞 OpenClaw | TypeScript | 430,000+ 行 | 全功能企业级 AI 助手 |
| 🐈 Nanobot | Python | ~4,000 行 | OpenClaw 的超轻量复刻 (1%) |
| 🦐 PP-Claw | Go | ~8,344 行 | Nanobot 的 Go 跨平台重写 |
注:PP-Claw 的代码行数 (~8K) 多于 Nanobot 核心代码 (~4K),是因为 Go 语言的类型声明、错误处理等语法特性比 Python 更冗长,同时 PP-Claw 包含了完整的 CLI 框架(945 行)和更多的渠道实现代码。如果对齐统计口径,两者在功能覆盖上完全一致。
本文将从项目架构设计、核心模块剖析、完整消息流转、与 Python 原版的深度对比四个维度,手把手拆解 PP-Claw 的每一行关键代码。
📐 一、全局架构总览
1.1 分层架构设计
PP-Claw 采用经典的 四层架构 + 事件驱动 设计。设计哲学是:AI Agent 的本质就是 "消息路由 + 工具编排 + 状态管理",因此架构应该围绕这三个核心点做到极简内聚。
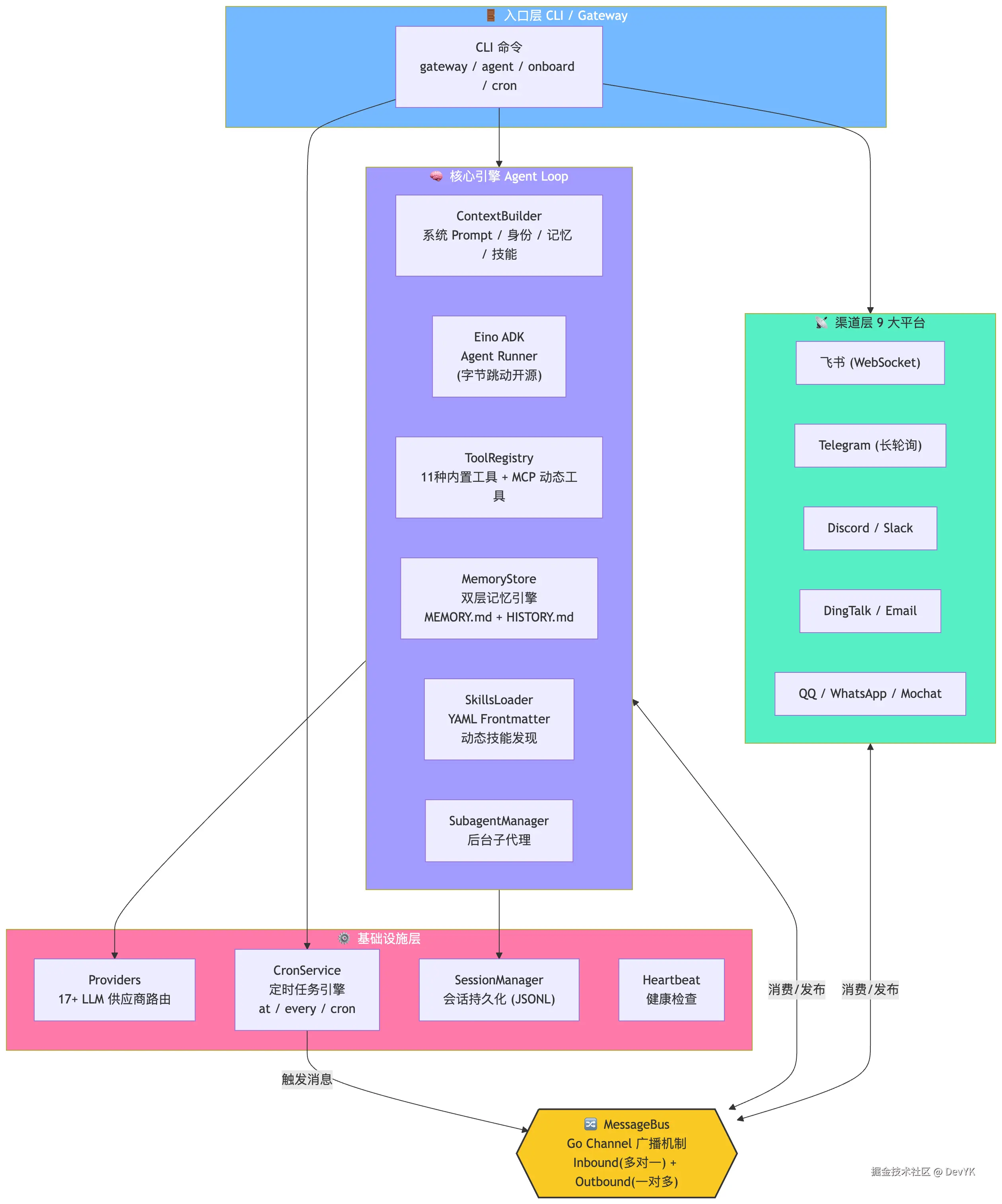
1.2 项目目录结构
ini
PP-Claw/
├── main.go # 入口 (15行!)
├── cli/
│ └── commands.go # CLI 命令体系 (945行)
├── agent/ # 🧠 核心引擎
│ ├── loop.go # Agent 主循环 + Eino ADK 集成 (538行)
│ ├── context.go # 上下文/Prompt 构建器 (271行)
│ ├── memory.go # 双层记忆系统 (267行)
│ ├── skills.go # 技能加载器 (276行)
│ ├── subagent.go # 子代理管理 (178行)
│ └── tools/ # 工具集
│ ├── registry.go # 工具注册表 + Eino 适配器 (177行)
│ ├── filesystem.go # 文件工具 (4种) (336行)
│ ├── shell.go # Shell 执行 + 安全沙箱 (166行)
│ ├── web.go # 搜索 + 抓取 (302行)
│ ├── mcp.go # MCP 协议客户端 (290行)
│ ├── cron.go # 定时任务工具 (204行)
│ ├── message.go # 消息工具 (70行)
│ ├── spawn.go # 子代理工具 (74行)
│ ├── feishu_docs.go # 飞书文档工具 (178行)
│ └── feishu_wiki.go # 飞书知识库工具 (269行)
├── bus/ # 🔀 消息总线
│ ├── events.go # 消息结构体 (57行)
│ └── queue.go # 广播队列 (97行)
├── channels/ # 📡 渠道适配
│ ├── base.go # 渠道接口 + 工厂 (88行)
│ ├── manager.go # 渠道管理器 (191行)
│ ├── feishu_64.go # 飞书 SDK (469行)
│ ├── telegram.go # Telegram Bot API (195行)
│ ├── dingtalk.go # 钉钉 (161行)
│ ├── slack.go # Slack Socket Mode (184行)
│ ├── discord.go # Discord (94行)
│ └── ... # email, qq, whatsapp, mochat
├── providers/ # 🤖 LLM 供应商
│ ├── provider.go # ChatModel 创建 (118行)
│ └── registry.go # 17+ Provider 路由 (309行)
├── config/ # ⚙️ 配置
│ ├── schema.go # 完整配置结构 (308行)
│ └── loader.go # YAML 加载/匹配 (159行)
├── cron/ # ⏰ 定时任务
│ ├── service.go # cron 引擎 (399行)
│ └── types.go # 数据结构 (47行)
├── session/
│ └── manager.go # 会话管理 (190行)
├── skills/ # 📦 内置技能包
│ ├── memory/SKILL.md
│ ├── cron/SKILL.md
│ ├── github/SKILL.md
│ ├── weather/SKILL.md
│ └── ... # 9 个内置技能
└── templates/ # 📝 引导配置
├── AGENTS.md
├── SOUL.md
├── USER.md
└── TOOLS.md1.3 代码量对比:Go vs Python
| 指标 | PP-Claw (Go) | Nanobot (Python) | 压缩比 |
|---|---|---|---|
| 核心代码行数 | ~8,344 行 | ~4000 行 | 80% |
| 源文件数 | 41 个 .go |
73 个 .py |
56% |
| 运行时依赖 | 1 个二进制 | Python 3.11+ + pip | ∞ 压缩 |
| 部署体积 | ~45 MB (单文件) | ~200 MB+ (含虚拟环境) | 22% |
| 跨平台支持 | amd64/arm64/riscv64/mips64 | 仅 x86/arm64 | 更广 |
| LLM 供应商 | 17+ | 17+ | 对齐 |
| 渠道支持 | 9 个 | 9 个 | 完全对齐 |
| MCP 协议 | ✅ Stdio + SSE + HTTP | ✅ Stdio + SSE + HTTP | 完全对齐 |
🧠 二、核心引擎:Agent Loop 深度剖析
Agent Loop 是整个系统的心脏。如果你只想理解一个模块,那就是它。
2.1 AgentLoop 结构体
go
type AgentLoop struct {
bus *bus.MessageBus // 消息总线(入口和出口)
cfg *config.Config // 全局配置
workspace string // 工作区路径
model string // LLM 模型名
maxIterations int // 最大工具调用轮次
memoryWindow int // 记忆窗口大小
context *ContextBuilder // System Prompt 构建器
sessions *session.Manager // 会话管理器(持久化)
tools *tools.Registry // 工具注册表
subagents *SubagentManager // 后台子代理管理器
memory *MemoryStore // 双层记忆系统
mcpManager *tools.MCPManager // MCP 协议管理器
// Eino ADK ------ 核心中的核心
chatModel einomodel.ToolCallingChatModel // LLM ChatModel
adkAgent adk.Agent // Eino Agent 实例
adkRunner *adk.Runner // Eino Runner (执行器)
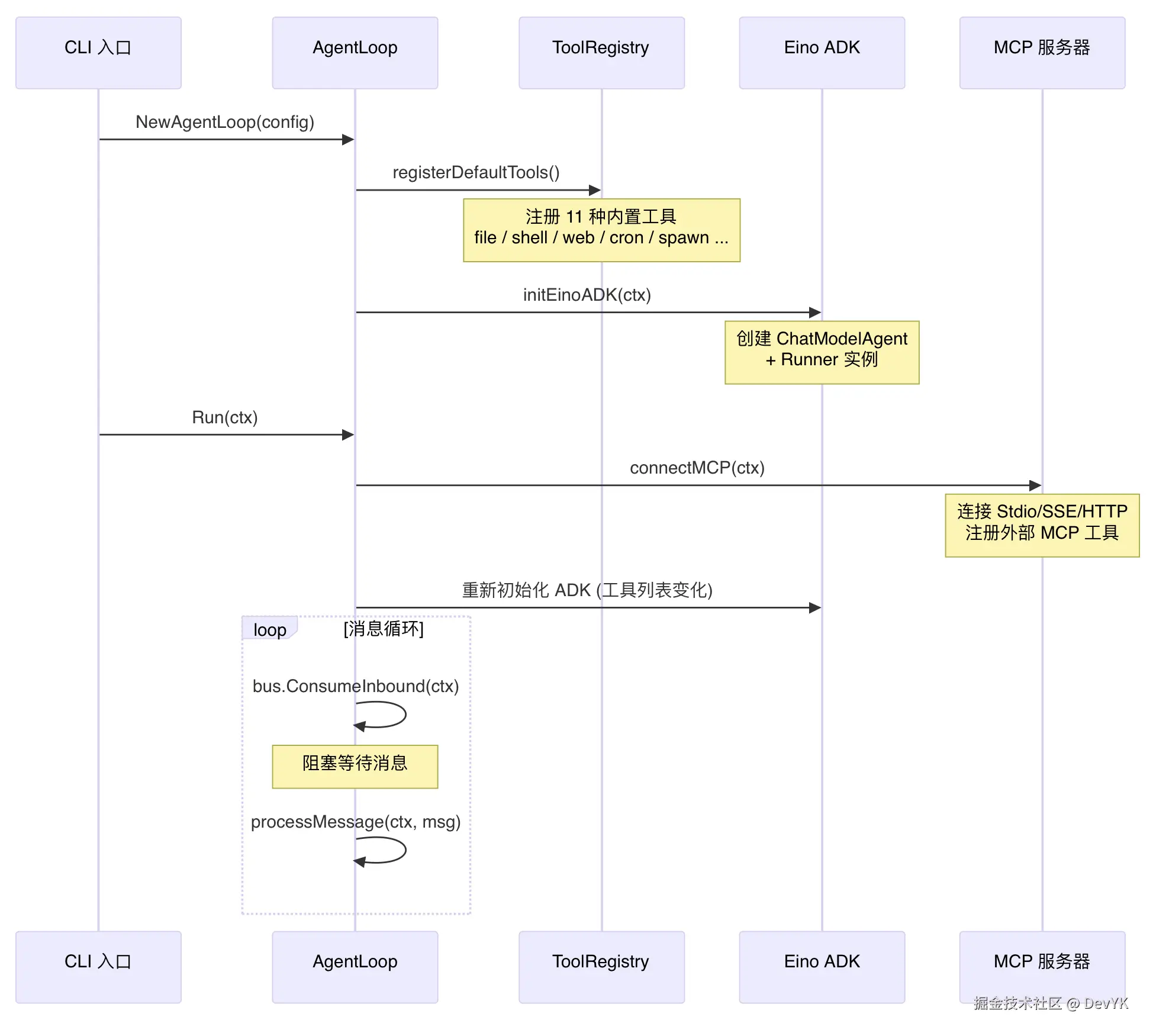
}2.2 启动流程
Agent 的启动可以用一句话概括:注册工具 → 初始化 Eino ADK → 连接 MCP → 进入消息循环。
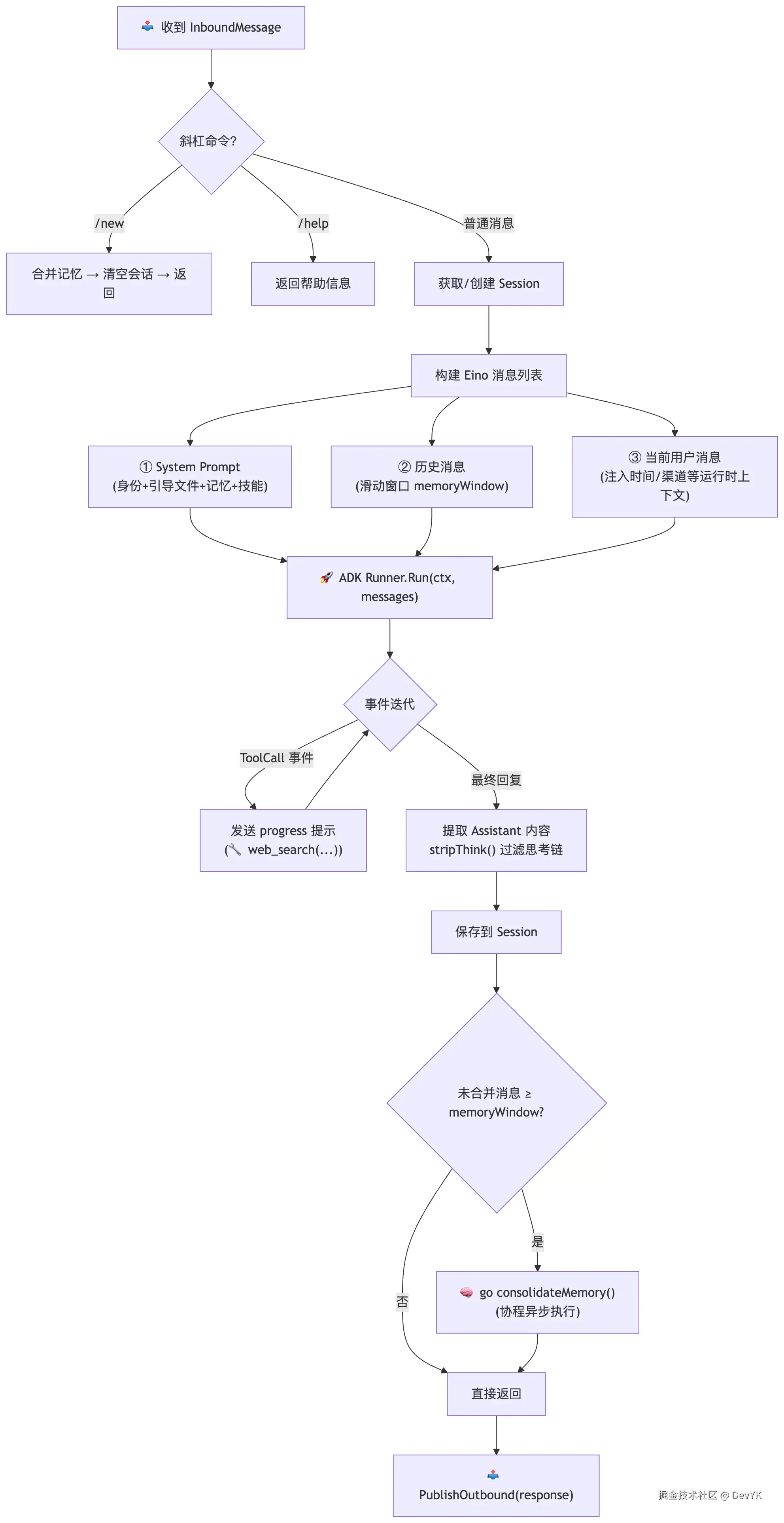
2.3 消息处理流水线 processMessage
这是核心中的核心,每条用户消息的完整处理链路:
2.4 Eino ADK------为什么选择它而不是手写?
这是一个关键的架构决策。Python 版 Nanobot 的 loop.py 中有一段经典的 Tool Calling 循环:
python
# Python 版的核心循环(简化后的伪代码)
while iterations < max_iterations:
response = await llm.chat(messages)
if response.tool_calls:
for call in response.tool_calls:
result = registry.execute(call.name, call.args)
messages.append(tool_result(call.id, result))
iterations += 1
else:
break # 得到最终回答这段代码看似简单,但在生产中要处理:流式传输、并发工具调用、错误重试、迭代上限、思考链过滤等大量细节。而 PP-Claw 选择了 字节跳动开源的 CloudWeGo Eino ADK,将这些全部托管:
go
// Go 版的核心循环(实际代码)
func (l *AgentLoop) runWithADK(ctx context.Context, messages []*schema.Message,
onProgress func(content string, toolHint bool)) (string, error) {
iter := l.adkRunner.Run(ctx, messages) // 一行搞定!
var lastContent string
for {
event, ok := iter.Next() // 迭代事件
if !ok { break }
if event.Err != nil { return "", event.Err }
if event.Output != nil && event.Output.MessageOutput != nil {
msg, _ := event.Output.MessageOutput.GetMessage()
if msg.Role == schema.Assistant {
content := stripThink(msg.Content) // 过滤 <think> 标签
if len(msg.ToolCalls) > 0 {
onProgress(content, false) // 发送进度通知
onProgress(formatToolHint(msg.ToolCalls), true)
}
if content != "" { lastContent = content }
}
}
}
return lastContent, nil
}关键桥接层------einoToolAdapter :PP-Claw 自定义的工具接口是 Tool{Name(), Description(), Parameters(), Execute()},而 Eino 需要 BaseTool{Info(), InvokableRun()}。一个小巧的适配器在两者之间架起了桥梁:
go
type einoToolAdapter struct {
tool Tool // PP-Claw 的 Tool 接口
}
func (a *einoToolAdapter) Info(_ context.Context) (*schema.ToolInfo, error) {
// 将 PP-Claw 的 Parameters() map 转换为 Eino 的 ParameterInfo 结构
// 支持 string / integer / number / boolean / array 类型映射
}
func (a *einoToolAdapter) InvokableRun(ctx context.Context, argsJSON string, ...) (string, error) {
var params map[string]any
json.Unmarshal([]byte(argsJSON), ¶ms)
return a.tool.Execute(ctx, params) // 委托给 PP-Claw 的工具执行
}这个设计让你可以用最简单的接口写工具,同时享受 Eino 的企业级编排能力。
🔀 三、消息总线:解耦的艺术
消息总线是全系统解耦的关键。PP-Claw 用 154 行 Go 代码实现了一个精简但完备的 pub-sub 系统。
3.1 双通道设计
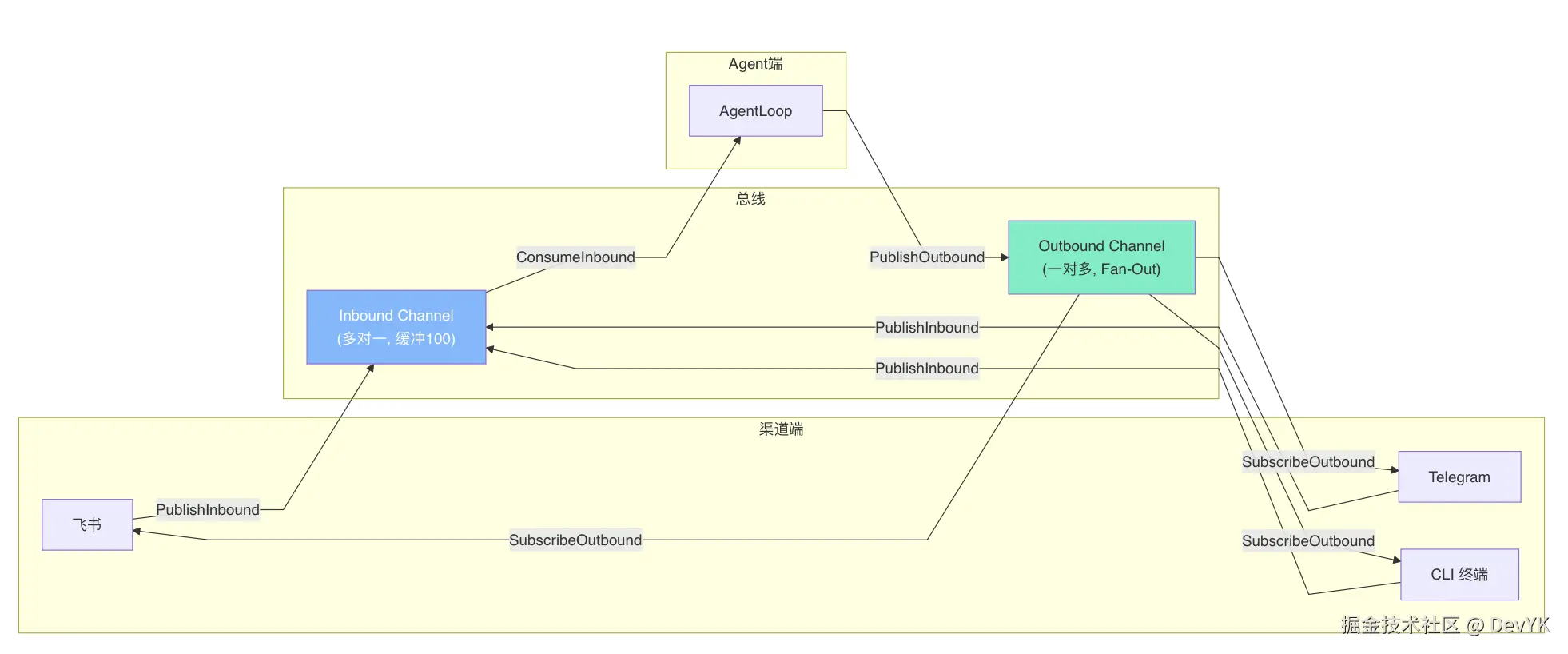
Inbound 是经典的 MPSC(多生产者-单消费者)模式------多个渠道都可以推入消息,但只有 AgentLoop 消费它们。
Outbound 是 Fan-Out 广播------Agent 的回复需要同时分发给 CLI 终端(显示在开发者面前)和原始渠道(回复给用户)。实现方式是一个后台 goroutine 不断从 outbound channel 读取消息,并广播给所有 subscribers:
go
func (b *MessageBus) fanOut() {
for msg := range b.outbound {
b.mu.RLock()
for _, ch := range b.subscribers {
select {
case ch <- msg:
default: // 订阅者缓冲区满,跳过避免阻塞
}
}
b.mu.RUnlock()
}
}这个 default 分支是一个关键的工程细节------它确保了一个慢消费者不会拖垮整个系统。
🧰 四、工具系统:Agent 的"双手"
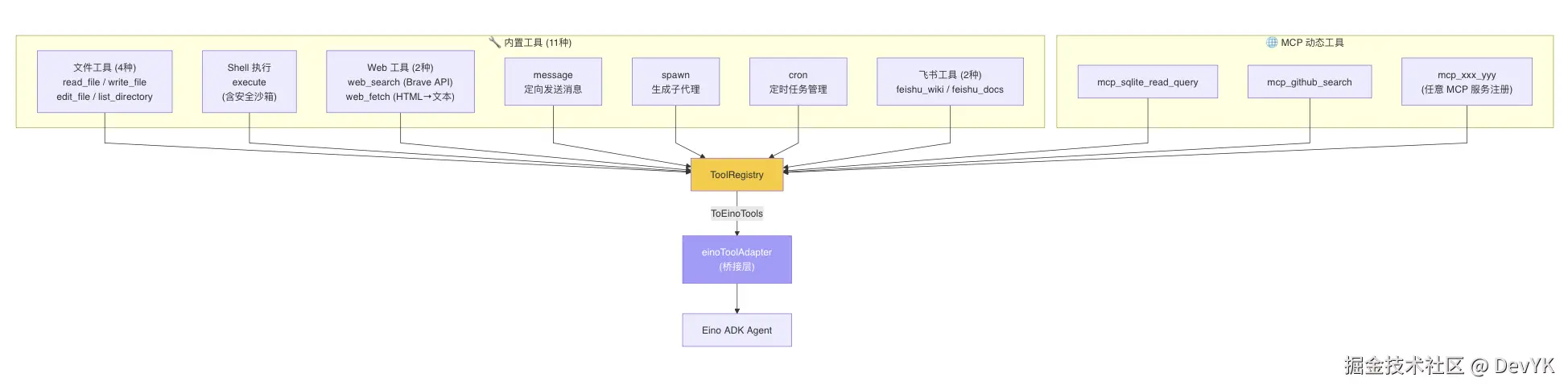
PP-Claw 内置了 11 种工具,涵盖文件操作、Shell 执行、网络搜索、MCP 扩展等。
4.1 工具注册表架构
4.2 Shell 执行安全沙箱
Shell 工具支持在 workspace 内执行任意命令,但内置了多层安全保障:
go
// 1. 正则 deny 模式 ------ 拦截高危操作
var denyPatterns = []*regexp.Regexp{
regexp.MustCompile(`(?i)\brm\s+-[rf]{1,2}\b`), // rm -rf
regexp.MustCompile(`(?i)\b(shutdown|reboot)\b`), // 关机/重启
regexp.MustCompile(`:\(\)\s*\{.*\};\s*:`), // Fork 炸弹
// ... 共 9 种模式
}
// 2. 路径遍历检测 ------ 防止 ../ 逃逸
// 3. 绝对路径校验 ------ 确保在 workspace 内
// 4. 超时控制 ------ 默认 60s 超时
// 5. 输出截断 ------ 最大 50000 字符4.3 edit_file 的智能模糊匹配
当 LLM 提供的 old_string 在文件中找不到完全匹配时(这在实际使用中经常发生,因为 LLM 可能记错缩进或空格),PP-Claw 会启动一个滑动窗口模糊匹配算法,在文件中找到最相似的片段并生成 diff 提示,帮助 LLM 自我修正:
erlang
old_string not found in file main.go.
Best match (85% similar) found at lines 12-15:
--- old_string (provided)
+++ actual (in file)
func main() {
- fmt.Println("hello")
+ fmt.Println("Hello, World!")
}4.4 MCP 协议:三种传输模式全覆盖
MCP (Model Context Protocol) 是 2024 年底由 Anthropic 推出、现已被整个行业广泛采用的标准协议。PP-Claw 原生支持全部三种传输模式:
| 传输模式 | 适用场景 | 实现方式 |
|---|---|---|
| Stdio | 本地子进程工具 (如 sqlite, filesystem) | NewStdioMCPClient(command, env, args...) |
| SSE | 远程 MCP 服务 (legacy) | URL 以 /sse 结尾自动识别 |
| Streamable HTTP | 远程 MCP 服务 (推荐) | 其他 URL 自动使用 |
配置示例 (nanobot.yaml):
yaml
tools:
mcp_servers:
sqlite:
command: "uvx"
args: ["mcp-server-sqlite", "--db-path", "./data/mydb.sqlite"]
tool_timeout: 30
remote_tool:
url: "https://api.example.com/mcp"
headers:
Authorization: "Bearer sk-xxx"MCP 管理器在 Agent 启动时自动连接所有配置的服务器,枚举可用工具,并以 mcp_{server}_{tool} 的命名规则注册到工具注册表------LLM 完全无感知这些工具来自外部。
🧠 五、双层记忆系统:让 Agent 不再"失忆"
这是 PP-Claw 最具创新性的模块之一。大多数 AI Agent 面临一个共同的问题:对话久了,Context Window 就会爆满崩溃。PP-Claw 的解决方案是一个双层 + LLM 驱动自我进化的记忆系统。
5.1 双层存储

HISTORY.md(短期事件日志) :以[YYYY-MM-DD HH:MM]格式追加记录每次对话的摘要。可被grep搜索,是 Agent 回忆"什么时候发生过什么"的工具。MEMORY.md(长期事实库):存储关于用户的持久性事实(偏好、习惯、项目信息等)。每次构建 System Prompt 时被完整注入。
5.2 LLM 驱动的自我进化
当未整合的消息达到 memoryWindow 阈值时,一个后台 goroutine 会自动触发记忆整合:
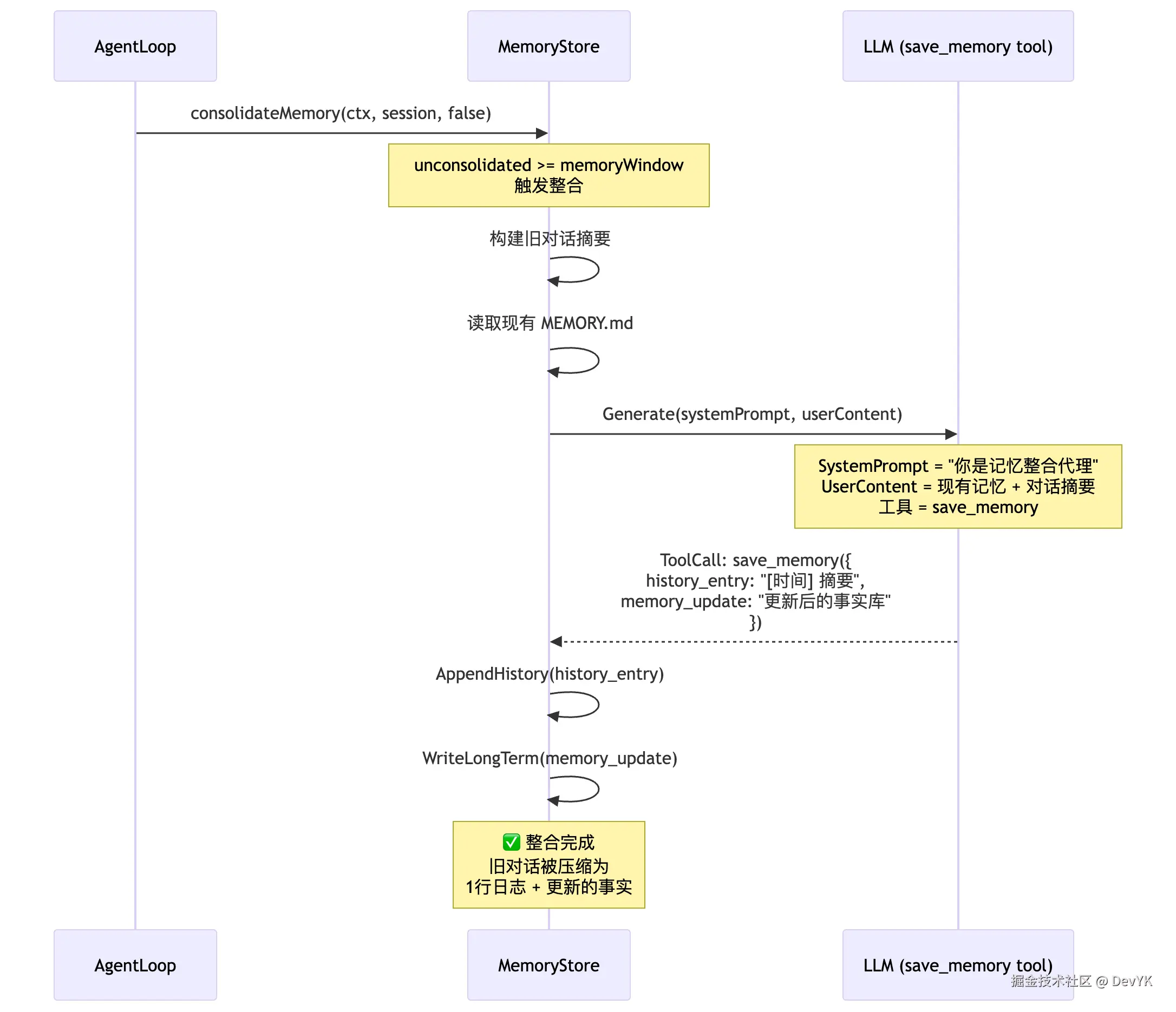
关键设计点 :这个整合过程不是简单的截断或摘要,而是让 LLM 自己决定哪些信息值得保留、哪些应该被丢弃、哪些事实被新信息推翻。通过 save_memory tool call 的强制约束,LLM 必须输出结构化的记忆更新。
如果 LLM 调用失败(网络问题、模型不支持 tool calling 等),系统会回退到一个简单的 fallback 策略:提取用户消息中的第一句话作为历史条目。
🎭 六、技能系统:声明式的能力扩展
6.1 零代码扩展能力
技能系统的设计理念是:不需要修改 Go 源代码,只需在 skills/ 目录下放一个 Markdown 文件,Agent 就能获得新能力。
每个技能是一个目录,包含一个 SKILL.md 文件,使用 YAML Frontmatter 声明元数据:
markdown
---
name: weather
description: "查询天气预报"
requires_bins: curl
always: false
---
# Weather Skill
使用 wttr.in API 查询天气。
## 用法
执行命令: `curl -s "wttr.in/{城市}?format=%C+%t+%h+%w"`6.2 技能发现机制

Progressive Loading 是一个精巧的设计:不是把所有技能的完整内容都塞进 System Prompt(那会浪费宝贵的 Context Window),而是只列出技能摘要。LLM 判断需要使用某个技能时,会用 read_file 工具主动加载其完整内容。
6.3 技能依赖检查
每个技能可以声明二进制依赖 (requires_bins) 和环境变量依赖 (requires_env)。启动时 PP-Claw 会用 exec.LookPath 检查依赖是否存在,不满足的技能会在摘要中标记为 available="false" 并列出缺失项,引导 LLM 提示用户安装。
📡 七、渠道体系:9 大平台全覆盖
7.1 工厂模式 + 接口多态
go
type Channel interface {
Name() string
Start(ctx context.Context) error
Stop() error
Send(msg *bus.OutboundMessage) error
}每个渠道通过 init() 注册工厂函数。渠道管理器在启动时查配置,对启用的渠道调用工厂创建实例、注入配置、启动消费循环。
7.2 以飞书为例的完整消息闭环
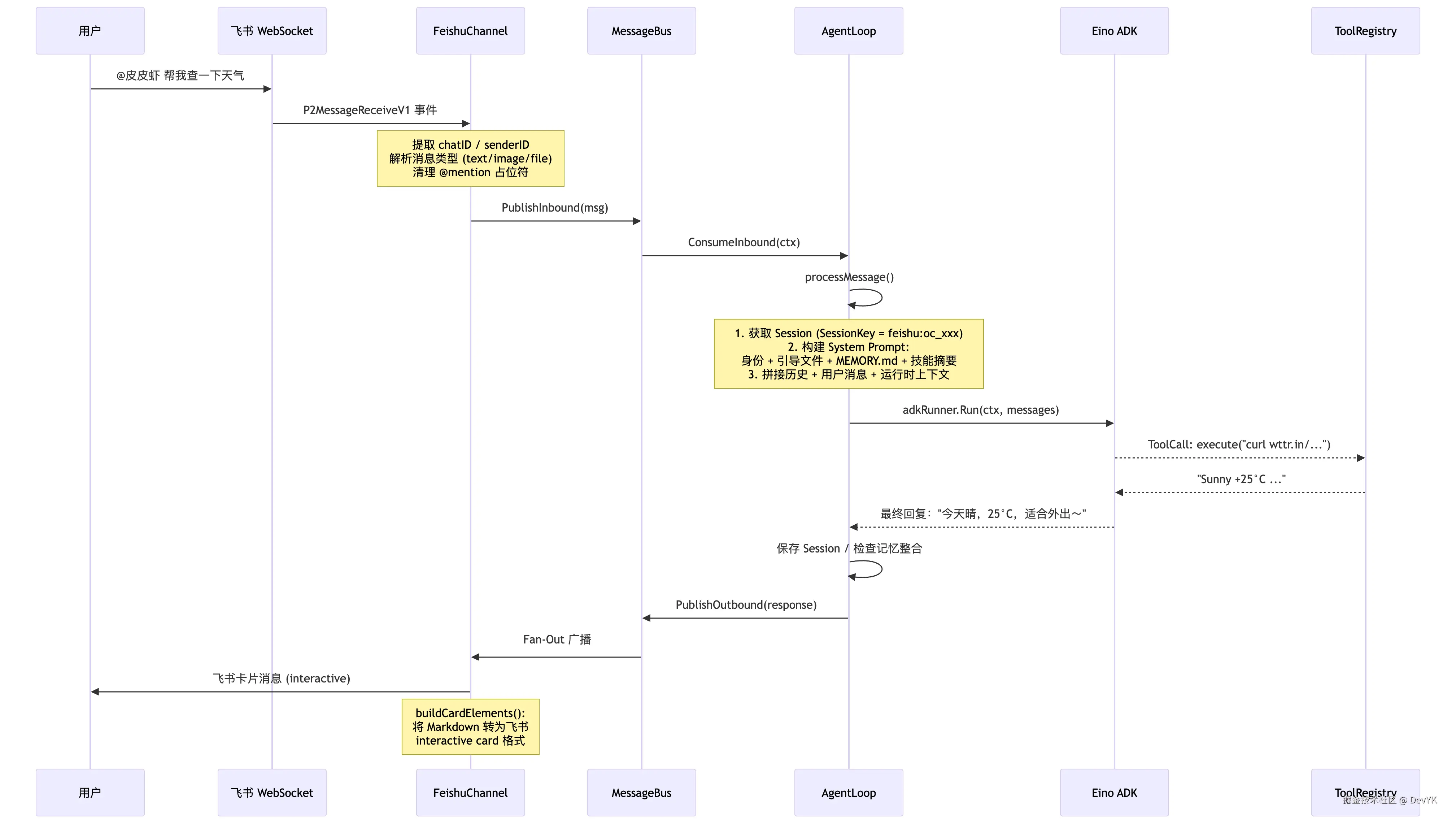
7.3 飞书渠道的特色实现
PP-Claw 的飞书实现有几个值得称道的工程细节:
- WebSocket 长连接 :使用
ws.NewClient建立长连接,比 Webhook 模式更实时、无需公网 IP - Markdown → Interactive Card 转换:自动把 Agent 的 Markdown 回复转成飞书富文本卡片,支持标题层级、代码块、列表等
- 消息引用回复 :通过
message_id实现精准引用回复,保持对话线索清晰 - 多消息类型支持:text / image / file 三种消息类型的收发
- Build Tag 条件编译 :
//go:build amd64 || arm64 || riscv64 || mips64 || ppc64------飞书 SDK 不支持 32 位架构,通过 Build Tag 优雅降级
7.4 完整渠道支持矩阵
| 渠道 | 接入方式 | 特色功能 |
|---|---|---|
| 飞书 | WebSocket (SDK) | 卡片消息、知识库/文档工具、图片/文件收发 |
| Telegram | Bot API 长轮询 | 代理支持、Markdown 消息 |
| Discord | REST + Gateway | 消息引用回复 |
| Slack | Socket Mode | Thread 回复、Emoji 反应 |
| 钉钉 | OpenDing SDK | Stream 模式 |
| IMAP/SMTP | 定时轮询收件箱 | |
| HTTP 回调 | 群聊/私聊 | |
| Bridge API | 外部桥接服务 | |
| Mochat | HTTP 轮询 | 自定义聊天协议 |
🤖 八、Provider 系统:17+ LLM 无缝切换
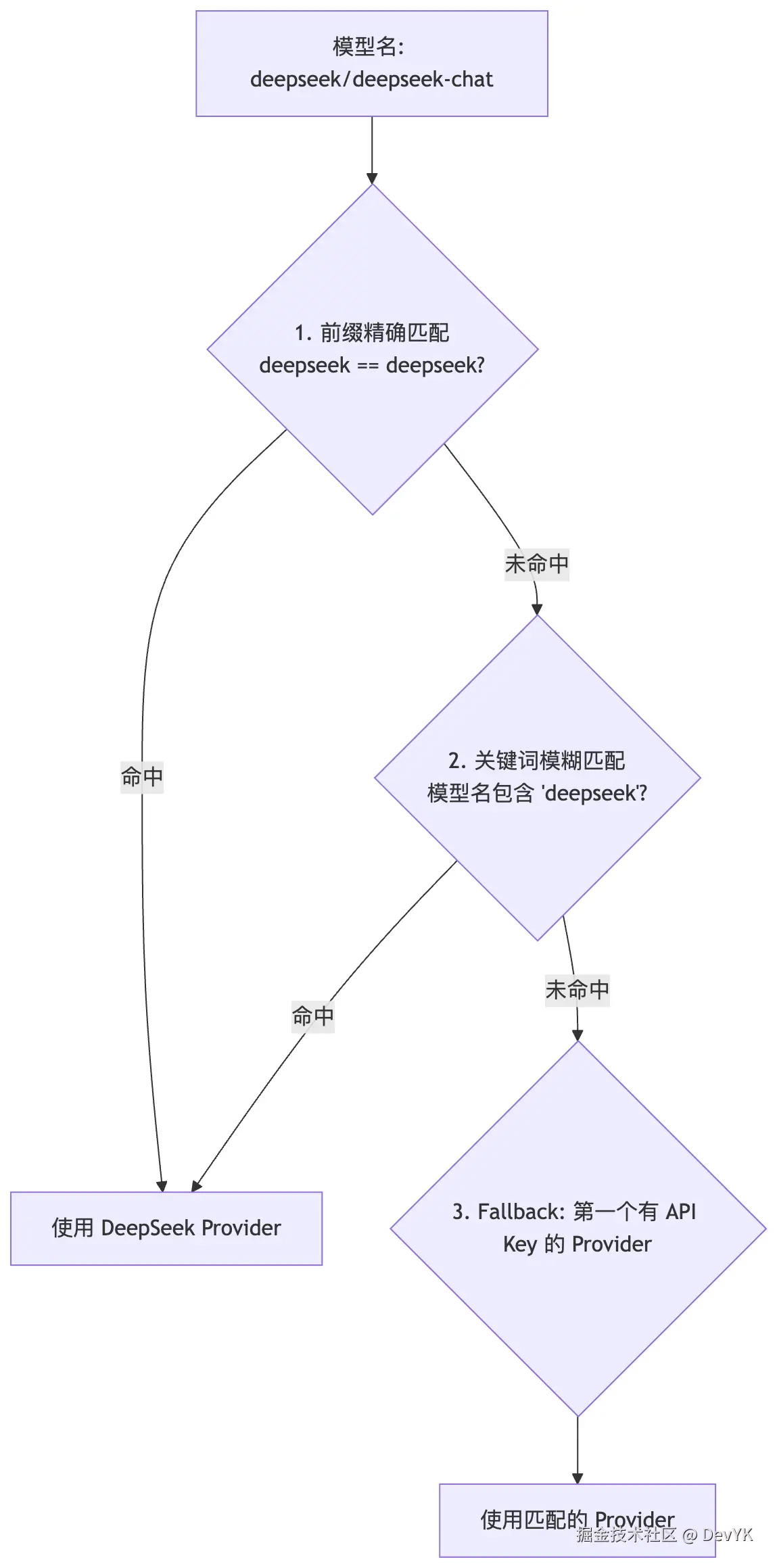
8.1 路由策略
PP-Claw 支持 17 种以上的 LLM 供应商,路由逻辑是三级匹配:
8.2 统一的 OpenAI 兼容层
所有 Provider 最终都通过 Eino 的 OpenAI 兼容层调用:
go
chatModelCfg := &einoopenai.ChatModelConfig{
APIKey: provider.APIKey,
Model: actualModel,
BaseURL: apiBase, // 每个 Provider 有各自的 BaseURL
}这意味着任何兼容 OpenAI API 格式的服务都可以直接接入,包括本地部署的 vLLM、Ollama 等。
8.3 支持的供应商列表
| 分类 | 供应商 |
|---|---|
| 标准 | OpenAI, Anthropic, DeepSeek, Gemini, Groq |
| 国内 | 智谱 (GLM), 通义千问 (DashScope), Moonshot (Kimi), MiniMax |
| 网关 | OpenRouter, AiHubMix, SiliconFlow, VolcEngine (火山引擎) |
| 本地 | vLLM, 自定义 (Custom) |
| OAuth | Github Copilot, OpenAI Codex |
每个供应商有独立的 ProviderSpec,包含关键词列表、环境变量名、默认 API Base、Prompt Cache 支持等元数据。
⏰ 九、定时任务系统
9.1 三种调度模式
| 模式 | 配置 | 示例 |
|---|---|---|
at |
指定时间戳(一次性) | 明天 9:00 执行一次 |
every |
固定间隔(循环) | 每 30 分钟执行一次 |
cron |
Cron 表达式(循环) | 0 9 * * 1-5(工作日 9:00) |
9.2 实现原理
CronService 使用一个高效的 timerLoop 模式:不是每秒轮询所有任务,而是计算"下一个最早到期的任务是什么时候",然后 time.After(delay) 精确睡眠到那个时刻。当有新任务添加时,通过 wake channel 唤醒 timerLoop 重新计算。
任务执行时,通过消息总线注入一条 InboundMessage,触发正常的 Agent 处理流程------Agent 不知道这条消息来自定时任务还是真人用户。
9.3 LLM 自主调度
最有趣的是,Agent 可以通过 cron 工具自主创建定时任务。例如用户说"每天早上 9 点给我推送新闻",Agent 会调用:
json
{
"name": "daily_news",
"schedule": {"kind": "cron", "expr": "0 9 * * *", "tz": "Asia/Shanghai"},
"message": "请搜索今日科技新闻 Top 5 并以简洁格式汇总",
"deliver": true,
"channel": "feishu",
"to": "oc_xxx"
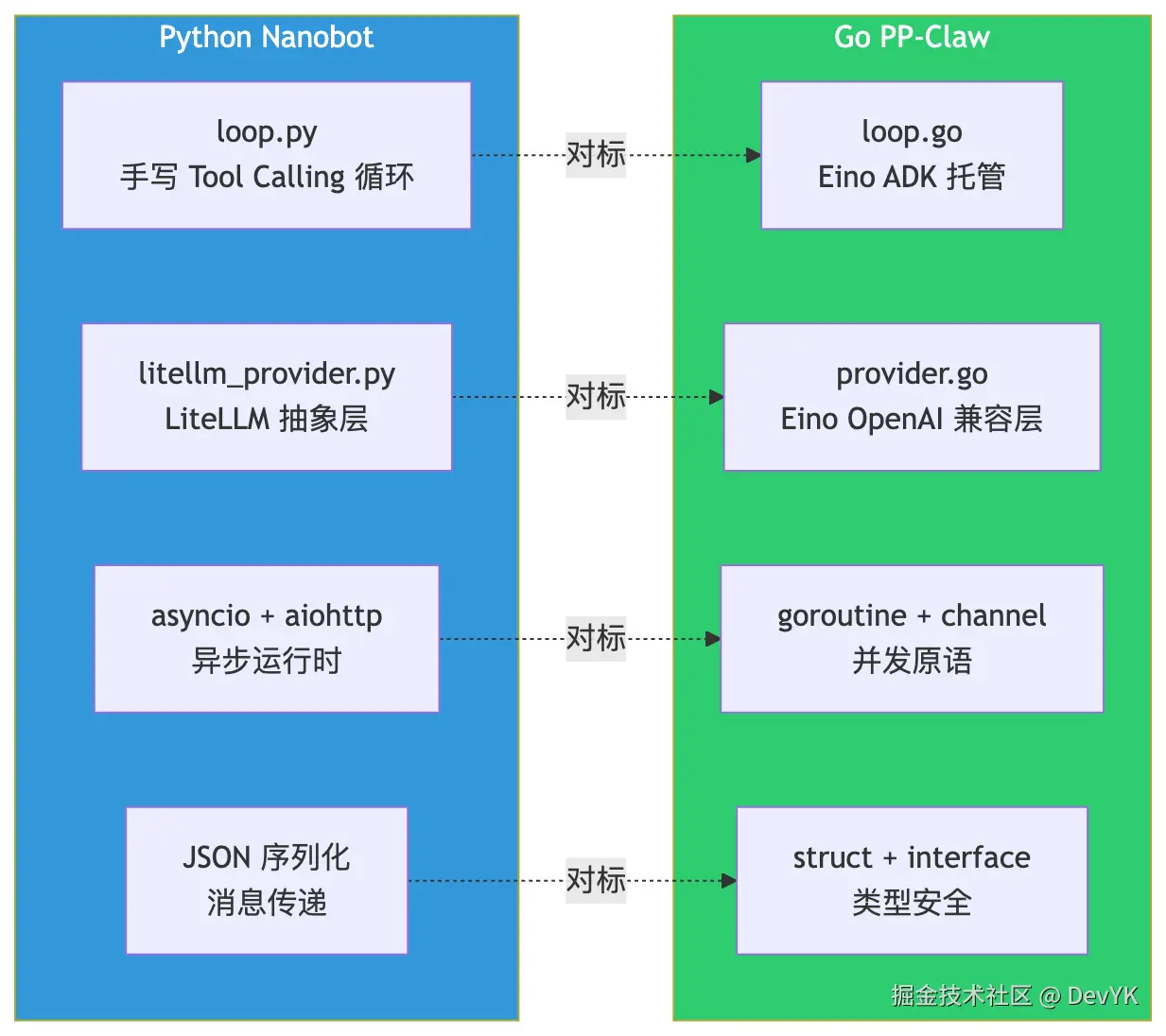
}🔄 十、与 Python 版 Nanobot 的深度对比
PP-Claw 是 Python 版 Nanobot 的 Go 语言重写。两者在功能上完全对齐,但在实现策略上有显著差异。
10.1 架构映射
10.2 关键差异对照表
| 维度 | Python Nanobot | Go PP-Claw |
|---|---|---|
| Tool Calling 编排 | 手写 while 循环 (~120行) | Eino ADK 托管 (~30行) |
| LLM 抽象 | LiteLLM (支持 100+ 模型) | Eino OpenAI 兼容 (统一协议) |
| 异步模型 | asyncio (单线程事件循环) | goroutine (真并发) |
| 类型系统 | 运行时检查 (Pydantic) | 编译期检查 (struct) |
| 消息总线 | asyncio.Queue | go channel + fan-out |
| 部署 | pip install + Python 运行时 | 单二进制文件 |
| 内存占用 | ~80MB 基线 | ~15MB 基线 |
| 启动速度 | ~3-5s | ~0.3s |
| MCP 客户端 | mcp (官方 Python SDK) | mcp-go (Go SDK) |
| 配置解析 | Pydantic + dotenv | yaml.v3 + struct tag |
10.3 Go 并发 vs Python 异步
这是最深层的架构差异。Python 版用 asyncio 实现异步,但受限于 GIL(全局解释器锁),所有代码仍然是单线程串行执行的------只是在 I/O 等待时可以切换到其他任务。
Go 版则天然支持真正的并行:
- Agent Loop 在一个 goroutine 中运行
- 每个渠道 独立 goroutine
- 记忆整合 在独立 goroutine 中异步执行 (
go l.consolidateMemory(...)) - Fan-Out 广播 在独立 goroutine 中运行
- 会话保存 在独立 goroutine 中异步写磁盘
这使得 PP-Claw 在同时处理多个渠道的高并发消息时,性能表现远优于 Python 版。
🚀 十一、快速开始
11.1 安装
bash
# 克隆代码
git clone https://github.com/yangkun19921001/PP-Claw.git
cd PP-Claw
# 编译(全平台交叉编译)
go build -o pp-claw .
# 或者直接运行
go run .11.2 初始化配置
bash
./pp-claw onboard交互式引导你选择 LLM 供应商、填写 API Key、配置模型名。配置会保存到 ~/.nanobot/nanobot.yaml。
11.3 三种使用模式
bash
# 1. 单次对话
./pp-claw agent -m "今天天气怎么样?"
# 2. 交互式聊天
./pp-claw agent
# 3. 全功能网关(多渠道 + 定时任务 + MCP)
./pp-claw gateway11.4 Docker 部署
dockerfile
FROM golang:1.23-alpine AS builder
WORKDIR /app
COPY . .
RUN go build -o nanobot .
FROM alpine:latest
COPY --from=builder /app/nanobot /usr/local/bin/
COPY --from=builder /app/skills /app/skills
COPY --from=builder /app/templates /app/templates
ENTRYPOINT ["nanobot"]
CMD ["gateway"]
# docker-compose.yml
services:
nanobot:
build: .
volumes:
- ~/.nanobot:/root/.nanobot
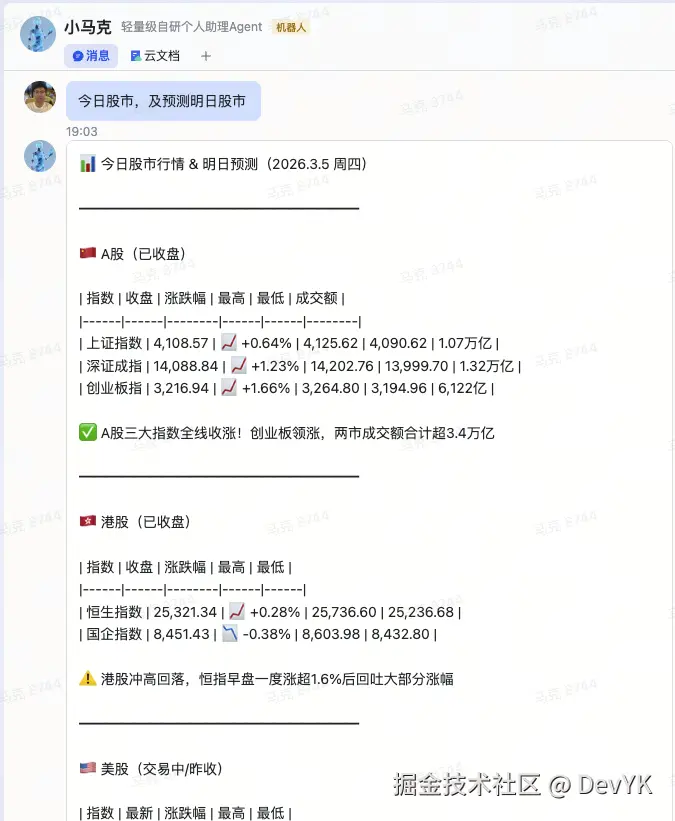
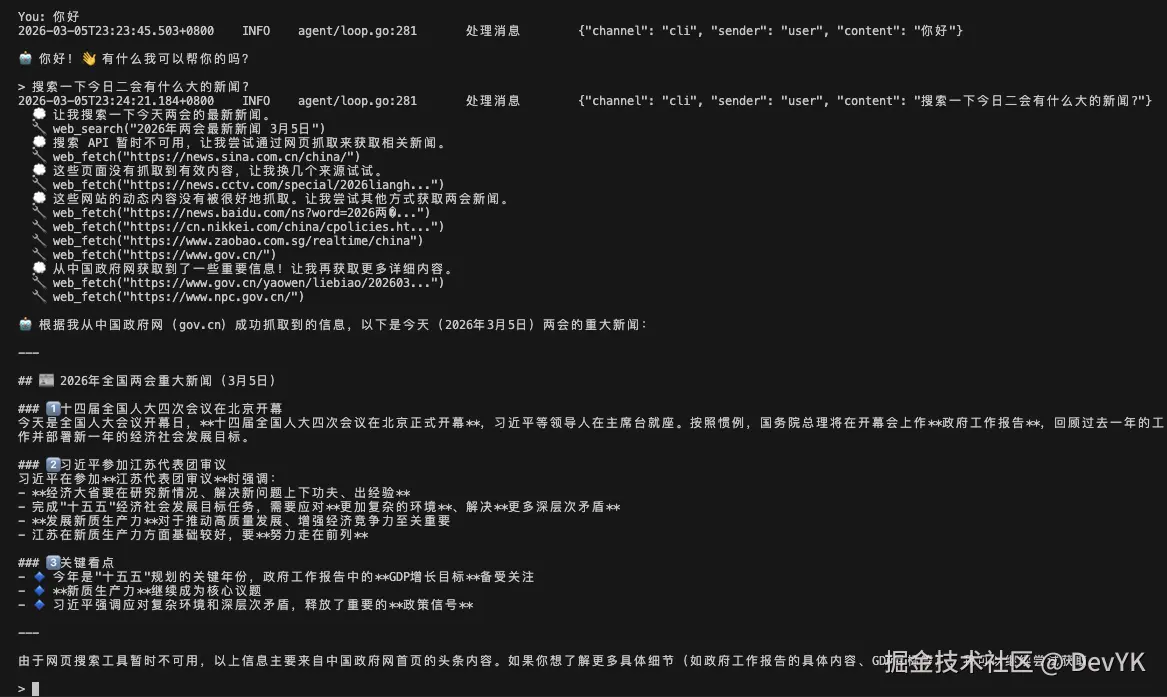
restart: unless-stopped🎬 十二、效果演示
🎯 总结
PP-Claw(皮皮虾)是 Python 版 Nanobot 的 Go 语言完整复刻版。它证明了一个观点:好的 AI Agent 不需要庞大的框架和复杂的抽象。用 Go 语言的工程美学------接口多态、goroutine 并发、channel 通信、组合继承------加上对 Eino ADK 的巧妙集成,~8,344 行代码就足以 1:1 复刻一个功能完备的生产级 AI Agent。
它的每一个设计决策都围绕一个核心目标:让 AI Agent 像一个 Unix 工具一样简单------编译、复制、运行,任何设备都可部署。 🦐
📦 项目地址 : github.com/openclaw/op...
🦞 OpenClaw: github.com/openclaw/op...
🐍 Python 原版 : github.com/HKUDS/nanob...
如果这篇文章对你有帮助,欢迎 Star ⭐ 和 Fork 🍴 项目,也欢迎在评论区交流你的想法!