

随着全球光伏累计装机规模突破2.2TW,单体电站已正式迈入GW级时代。作为资深运维架构师,我们必须正视物理层面的严峻挑战:根据国际能源署(IEA)测算,仅积灰损失在2023年就导致了全球40亿至70亿欧元的经济损失。
在如此规模的资产管理中,光伏清扫机器人(ARCS)已从可选插件进化为组件、支架、逆变器之外的"第四大核心件"。然而,实现真正的"无人值守"并非堆砌硬件,而是要在高盐雾、极端温差和复杂地形下,通过精准的电机驱动与通信架构实现系统性降本增效。本文将从硬件选型的专业维度,深度解析无刷与有刷两种主流方案的技术逻辑与业务权衡。


针对追求极低维护频率的大型地面电站,无刷电机硬件方案是高性能控制与5km长距离通讯的极致组合。

核心硬件与环境硬化。
- 智能控制器: 采用DC24V工业级供电,核心亮点在于自主姿态识别与掉电检测。作为硬件PM,我们为其集成了加热与散热模块,确保在沙漠或高寒地区作业时控制逻辑不宕机。
- 长距离组网优势: 搭载无线组网网关,在空旷场区可实现5km半径覆盖。通过ADR(自适应速率)技术,网关能根据信号强度动态优化传输带宽与能耗,配合LTE通讯实现基站的"免接线"快速部署。
针对玻璃膜层的高精度保护
- 驱动监测精度: 驱动板支持多路无刷电机,最大输出电流达10A。其核心竞争力在于电机电流监测精度优于1%。
- 材料科学应用: 依托高精度电流反馈,系统能实时调节改性PBT柔性刷丝(具备高熔点、低吸水率特性)的转速。这对于保护光伏玻璃至关重要:行业标准要求2.0mm钢化玻璃减反膜层需满足3H铅笔硬度(500g载荷),我们的方案通过毫秒级负载感知,严控摩擦力,确保膜层全生命周期无损。

对于地形破碎、需要频繁跨阵列摆渡的山地或渔光互补项目,有刷方案凭借其"三位一体"的模块化架构展现了极高的业务弹性。
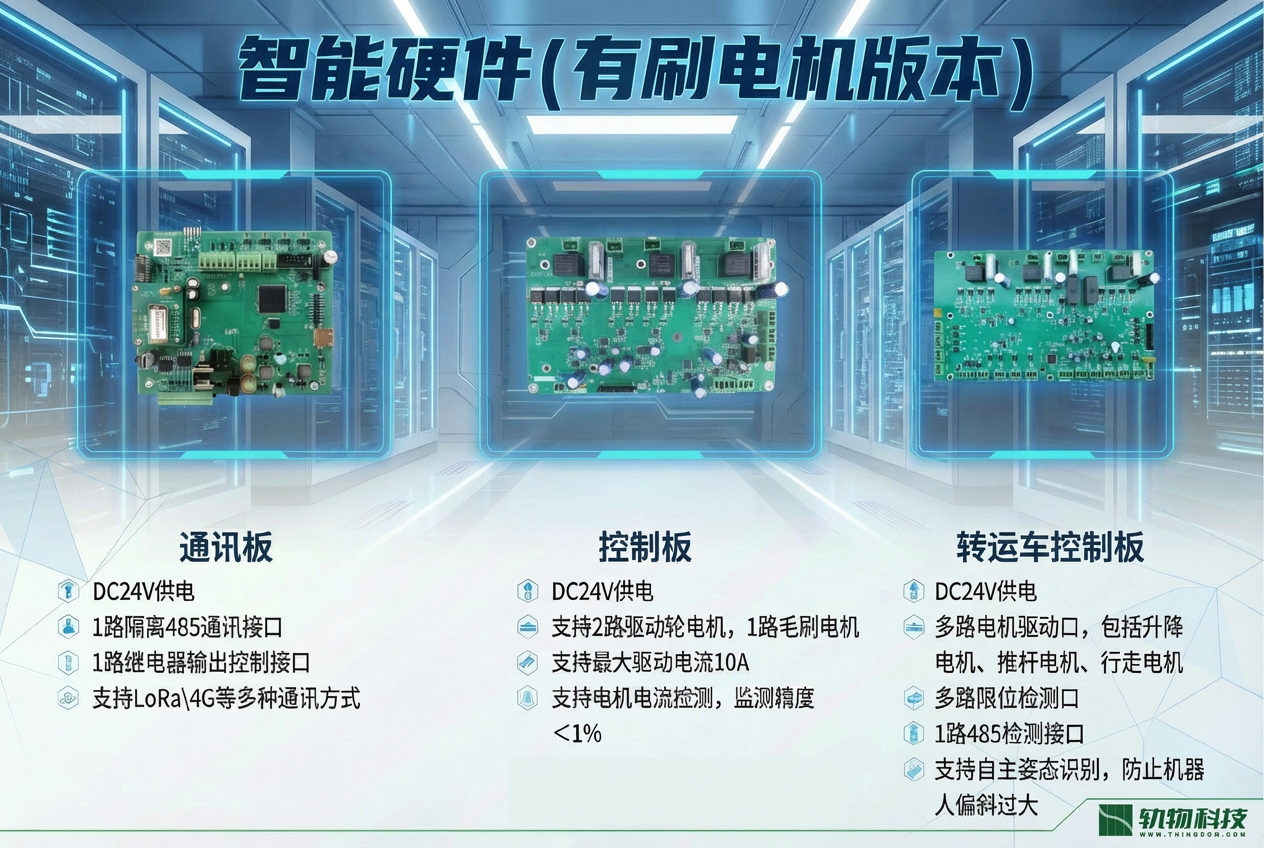
**模块化架构与电路安全,**该方案由通讯板、控制板和转运车控制板构成。
- 隔离保护: 通讯板特别配置了1路隔离的485接口。在大型电站动辄数公里的布线环境中,隔离设计是防止浪涌冲击烧毁主板的"最后防线"。
- 多维动力协同: 专用的"转运车控制板"集成了多路驱动接口,通过算法同步协调升降电机、推杆电机和行走电机,实现机器人从停机位到作业位的全自动"摆渡"。
**安全冗余设计:**支持多路限位检测口,并额外保留了遥控器直接控制权限。在复杂地形初次部署或异常掉电排障时,物理遥控的介入能力是保障资产安全的关键。

从架构师视角出发,我们需要在寿命、成本与业务逻辑间寻找平衡点:
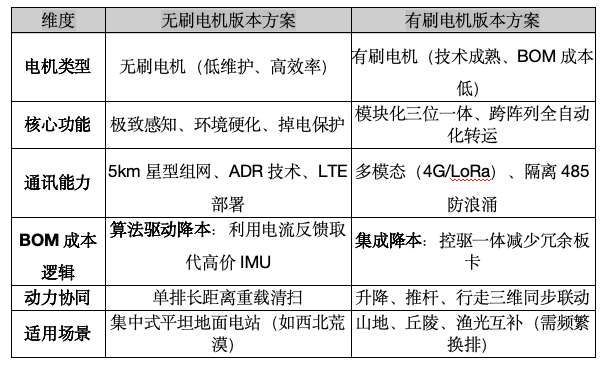
**算法赋能:**以电流反馈取代IMU,两款方案均内置了"基于电机电流反馈的姿态闭环控制算法"。这不仅能实现厘米级的实时纠偏,更核心的业务价值在于它替代了昂贵的IMU传感器,在保证性能的同时显著降低了整机的BOM支出。

硬件系统不应是孤岛,必须与组件及支架深度适配以避免次生损害:
- 组件力学兼容: 硬件通过轻量化设计,将运行过程中的组件变形量严控在20mm以内。同时,边框强度适配需满足5400Pa机械载荷不脱框要求。
- 支架结构协同: 针对跟踪支架,硬件方案必须能支撑±60°的停机角度偏差。在安装层面,要求支架檩条厚度不低于1.5mm,以确保桥架搭接的物理稳定性。
- 秒级避险同步: 机器人SCADA系统集成气象站数据,对于风速、温湿度等核心安全告警,实现秒级数据上报。一旦风速超过安全阈值,系统会立即触发紧急停机并通知支架回正,避免共振与碰撞。

作为资深架构师,轨物科技的专业选型建议如下:
- 大型集中式地面电站(西北/中东): 优先选择无刷电机方案。重点利用其5km超长通讯半径与无刷电机免维护特性,在恶劣环境下追求最高作业频次与全生命周期的LCOE最优。
- 破碎化/复杂地形电站(山地/渔光): 推荐有刷电机+转运车方案。利用"升降-推杆-行走"的高效协同实现单机覆盖多排组件,最大化摊销单台机器人的硬件投入成本。
轨物科技方案的客户价值:
- 研发加速: 控驱一体化设计,实测可缩短50%以上的研发周期。
- 合规背书: 深度参与起草国家标准《光伏组件清洁机器人通用技术条件》,设计完全符合行业规范。
- 降本增效: 算法取代高价传感器,高集成板卡降低30%以上的后期运维人力投入。


在光伏运维向"数智化"转型的浪潮中,我们正经历从"瓦特(功率)"到"比特(信息)"的深度融合。智能硬件不再只是单纯的清扫工具,而是电站运维的感知中枢。通过构建开放、标准且具备极高鲁棒性的硬件体系,我们将助力全球光伏资产在25年的全生命周期内实现真正的价值溢出。




