这里主要将colmap中Feature Matching部分的vocab_tree_matcher对应源码
图像matcher分如下步骤:

函数主体在feature_matching.cc中Run()函数中。
void Run() override {
LOG_HEADING1("Feature matching & geometric verification");
Timer run_timer;
run_timer.Start();
if (!matcher_.Setup()) {
return;
}
std::unique_ptr<PairGenerator> pair_generator =
THROW_CHECK_NOTNULL(pair_generator_factory_());
while (!pair_generator->HasFinished()) {
if (IsStopped()) {
run_timer.PrintMinutes();
return;
}
Timer timer;
timer.Start();
const std::vector<std::pair<image_t, image_t>> image_pairs =
pair_generator->Next();
matcher_.Match(image_pairs);
LOG(INFO) << StringPrintf("in %.3fs", timer.ElapsedSeconds());
}在IndexImages()函数中处理加载的db库中的数据。主要是keypoints, descriptors,然后放入到visual_index_->Add()中。
void VocabTreePairGenerator::IndexImages(
const std::vector<image_t>& image_ids) {
retrieval::VisualIndex::IndexOptions index_options;
// We only assign each feature to a single visual word in the indexing phase.
// During the query phase, we check for overlap in possibly multiple nearest
// neighbor visual words. We could do it symmetrically but experiments showed
// only marginal improvements that do not justify the memory/compute increase.
index_options.num_neighbors = 1;
index_options.num_checks = options_.num_checks;
index_options.num_threads = options_.num_threads;
for (size_t i = 0; i < image_ids.size(); ++i) {
Timer timer;
timer.Start();
LOG(INFO) << StringPrintf(
"Indexing image [%d/%d]", i + 1, image_ids.size());
auto keypoints = *cache_->GetKeypoints(image_ids[i]);
auto descriptors = *cache_->GetDescriptors(image_ids[i]);
if (visual_index_ == nullptr) {
visual_index_ = retrieval::VisualIndex::Read(
options_.vocab_tree_path.empty()
? GetVocabTreeUriForFeatureType(descriptors.type)
: options_.vocab_tree_path);
}
if (options_.max_num_features > 0 &&
descriptors.data.rows() > options_.max_num_features) {
ExtractTopScaleFeatures(
&keypoints, &descriptors, options_.max_num_features);
}
visual_index_->Add(
index_options, image_ids[i], keypoints, descriptors.ToFloat());
LOG(INFO) << StringPrintf(" in %.3fs", timer.ElapsedSeconds());
}
// Compute the TF-IDF weights, etc.
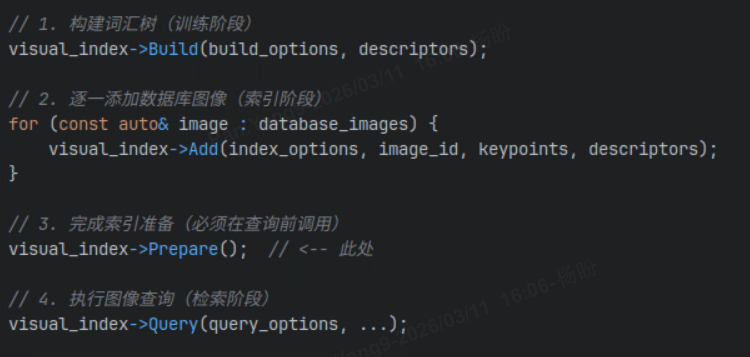
visual_index_->Prepare();
}visual_index_->Add()函数的主体在visual_index.cc文件中。该函数的主要作用是将单张图像的特征描述添加到视觉索引中,建立图像特征与视觉单词的映射关系。这是词汇树图像检索系统的索引过程。主要注意其中word_ids.
void Add(const IndexOptions& options,
int image_id,
const FeatureKeypoints& keypoints,
const FeatureDescriptorsFloat& descriptors) override {
THROW_CHECK_EQ(descriptors.data.cols(), kDescDim);
THROW_CHECK_EQ(keypoints.size(), descriptors.data.rows());
THROW_CHECK_EQ(descriptors.type, feature_type_)
<< "Feature type mismatch: index was built with "
<< FeatureExtractorTypeToString(feature_type_) << " but received "
<< FeatureExtractorTypeToString(descriptors.type);
// If the image is already indexed, do nothing.
if (IsImageIndexed(image_id)) {
return;
}
image_ids_.insert(image_id);
prepared_ = false;
if (descriptors.data.rows() == 0) {
return;
}
const WordIds word_ids = FindWordIds(descriptors.data,
options.num_neighbors,
options.num_checks,
options.num_threads);
for (Eigen::Index i = 0; i < descriptors.data.rows(); ++i) {
const auto& descriptor = descriptors.data.row(i);
typename InvertedIndexType::GeomType geometry;
geometry.x = keypoints[i].x;
geometry.y = keypoints[i].y;
geometry.scale = keypoints[i].ComputeScale();
geometry.orientation = keypoints[i].ComputeOrientation();
for (int n = 0; n < options.num_neighbors; ++n) {
const int word_id = word_ids(i, n);
if (word_id != InvertedIndexType::kInvalidWordId) {
inverted_index_.AddEntry(image_id, word_id, i, descriptor, geometry);
}
}
}
}AddEntry()的源码如下。
template <typename kDescType, int kDescDim, int kEmbeddingDim>
void InvertedIndex<kDescType, kDescDim, kEmbeddingDim>::AddEntry(
const int image_id,
const int64_t word_id,
typename DescType::Index feature_idx,
const DescType& descriptor,
const GeomType& geometry) {
THROW_CHECK_EQ(descriptor.size(), kDescDim);
const ProjDescType proj_desc =
proj_matrix_ * descriptor.transpose().template cast<float>();
inverted_files_.at(word_id).AddEntry(
image_id, feature_idx, proj_desc, geometry);
}
template <int kEmbeddingDim>
void InvertedFile<kEmbeddingDim>::AddEntry(const int image_id,
typename DescType::Index feature_idx,
const DescType& descriptor,
const GeomType& geometry) {
THROW_CHECK_GE(image_id, 0);
THROW_CHECK_EQ(descriptor.size(), kEmbeddingDim);
EntryType entry;
entry.image_id = image_id;
entry.feature_idx = feature_idx;
entry.geometry = geometry;
ConvertToBinaryDescriptor(descriptor, &entry.descriptor);
entries_.push_back(entry);
status_ &= ~kEntriesSorted;
}最后都放入到entries_中。entries_可以理解为集成了描述子+key+id的结构体。
std::vector<EntryType> entries_;
template <int kEmbeddingDim>
class InvertedFile {
public:
using DescType = Eigen::VectorXf;
using GeomType = FeatureGeometry;
using EntryType = InvertedFileEntry<kEmbeddingDim>;
enum Status : uint8_t {
kUnusable = 0x00,
kHasEmbedding = 0x01,
kEntriesSorted = 0x02,
kUsable = 0x03,
};
template <int N>
struct InvertedFileEntry {
void Read(std::istream* in);
void Write(std::ostream* out) const;
// The identifier of the image this entry is associated with.
int image_id = -1;
// The index of the feature within the image's keypoints list.
int feature_idx = -1;
// The geometry of the feature, used for spatial verification.
FeatureGeometry geometry;
// The binary signature in the Hamming embedding.
std::bitset<N> descriptor;
};