一、 系统概述与设计目标
1.1 系统定位
构建一个基于osgEarth的三维地理信息平台,实现多源异构态势数据 的一体化融合、三维可视化、实时动态推演与智能分析,服务于指挥控制、战场监视、应急响应、智慧城市等应用场景。
1.2 设计目标
- 全维度态势融合:支持陆、海、空、天、电、网多维态势一体化显示
- 实时动态推演:支持大规模实体(≥10万个)的实时运动仿真与轨迹预测
- 高保真可视化:实现地表、地貌、地物、气象、电磁环境的逼真渲染
- 智能分析决策:集成空间分析、威胁评估、路径规划等辅助决策功能
- 跨平台协同:支持C/S、B/S架构,实现多终端协同标绘与信息共享
- 高效稳定运行:支持大规模地理数据流畅渲染,帧率≥30FPS
二、 系统总体架构
┌─────────────────────────────────────────────────────────────┐
│ 应用层 - 综合态势应用 │
├─────────────────────────────────────────────────────────────┤
│ 指挥控制│战场监视│应急指挥│智慧城市│模拟训练│... │
├─────────────────────────────────────────────────────────────┤
│ 服务层 - 态势服务中间件 │
├──────────┬──────────┬──────────┬──────────┬──────────┤
│ 数据服务 │ 分析服务 │ 推演服务 │ 通信服务 │ 存储服务 │
├──────────┴──────────┴──────────┴──────────┴──────────┤
│ 核心层 - osgEarth引擎平台 │
├─────────────────────────────────────────────────────────────┤
│ 三维渲染│地形调度│数据驱动│特效系统│交互系统│插件框架│
├─────────────────────────────────────────────────────────────┤
│ 数据层 - 多源数据融合 │
├──────────┬──────────┬──────────┬──────────┬──────────┤
│ 基础地理│实时传感│情报信息│模型库│专题数据│ │
└──────────┴──────────┴──────────┴──────────┴──────────┘三、 核心模块详细设计
3.1 数据加载与预处理模块
3.1.1 地理数据加载引擎
c
class GeodataLoader {
public:
// 多源数据统一接口
bool loadTerrain(const std::string& source); // 地形数据
bool loadImagery(const std::string& source); // 影像数据
bool loadVector(const std::string& source); // 矢量数据
bool loadElevation(const std::string& source); // 高程数据
// 数据缓存与调度
void setupPagingLOD(); // 分页LOD调度
void setupCacheStrategy(size_t cacheSize); // 缓存策略
private:
// 支持的数据格式
enum DataFormat {
GDAL_TIFF, GDAL_IMG, WMS, TMS, WMTS,
OSGB, 3DTiles, SHP, KML, GeoJSON
};
// 数据预处理流水线
void preprocessPipeline(osg::Node* data);
};3.1.2 实时数据接入器
arduino
class RealTimeDataAdapter {
public:
// 多协议数据接入
bool connectSocket(const SocketConfig& config); // 网络Socket
bool connectDB(const DBConfig& config); // 数据库
bool parseMessage(const Message& msg); // 消息解析
// 数据格式转换
SituationEntity convertToEntity(const RawData& raw);
// 数据缓冲区
class DataBuffer {
CircularBuffer<SituationUpdate> buffer_;
std::mutex mutex_;
size_t maxSize_ = 10000;
};
};3.2 三维场景管理模块
3.2.1 场景图组织架构
scss
Root
├── EarthNode (osgEarth::MapNode)
│ ├── TerrainLayer
│ ├── ImageryLayer[0..N]
│ ├── ElevationLayer
│ └── ModelLayer
├── SituationNode
│ ├── EntityGroup (按类型/所属分组)
│ │ ├── AircraftGroup
│ │ ├── VehicleGroup
│ │ ├── ShipGroup
│ │ └── FacilityGroup
│ ├── OverlayGroup (叠加层)
│ │ ├── TrackLayer
│ │ ├── CoverageLayer
│ │ └── AnnotationLayer
│ └── EffectGroup (特效)
│ ├── ParticleSystem
│ └── LineEffects
├── SkyNode (天空、大气、光照)
└── UICamera (UI摄像机)3.2.2 实体管理系统
arduino
class EntityManager {
public:
// 实体生命周期管理
EntityID createEntity(const EntityTemplate& tpl);
bool updateEntity(EntityID id, const EntityState& state);
bool removeEntity(EntityID id);
// 空间索引加速查询
std::vector<EntityID> queryByRange(const osg::Vec3d& center,
double radius);
std::vector<EntityID> queryByFrustum(const osg::Camera* camera);
// 实体状态插值与预测
void predictStates(double deltaTime);
private:
// 四叉树空间索引
class QuadTreeIndex {
struct Node {
osg::BoundingBox bounds;
std::vector<EntityID> entities;
Node* children[4];
};
Node* root_;
int maxDepth_ = 8;
int maxEntitiesPerNode_ = 100;
};
// 实体池(对象池模式)
class EntityPool {
std::vector<Entity> pool_;
std::queue<size_t> freeList_;
Entity* allocate();
void deallocate(Entity* entity);
};
};3.3 渲染与特效模块
3.3.1 多级LOD渲染策略
arduino
class LODStrategy {
public:
// 距离LOD
struct DistanceLOD {
double nearDistance; // 切换到高模
double midDistance; // 中模
double farDistance; // 低模
double cullDistance; // 裁剪距离
};
// 屏幕空间LOD
struct ScreenSpaceLOD {
double pixelThreshold; // 像素阈值
double sizeRatio; // 屏幕占比
};
// 自适应LOD
void adaptiveLOD(double frameTime,
double gpuLoad,
double cpuLoad);
private:
// 基于视点的LOD计算
float computeLODLevel(const osg::Vec3d& position,
const osg::Camera* camera);
};3.3.2 高级特效系统
arduino
class EffectSystem {
public:
// 粒子特效
class ParticleEffect {
// 爆炸、烟雾、火焰、尾迹
void createExplosion(const osg::Vec3d& pos, float scale);
void createSmokeTrail(EntityID entity, float duration);
void createWaterWake(EntityID ship, float intensity);
};
// 着色器特效
class ShaderEffect {
// 高亮、描边、热力图、夜视
void applyHighlight(EntityID id, const osg::Vec4& color);
void applyOutline(osg::Node* node, float width);
void applyThermalMap(osg::Image* elevation);
};
// 几何特效
class GeometryEffect {
// 扫描线、雷达扇面、电子围栏
void createScanLine(const osg::Vec3d& center,
double radius,
double angle);
void createRadarCone(EntityID radar,
double range,
double azimuth,
double elevation);
};
};3.4 交互与标绘模块
3.4.1 交互处理器
arduino
class InteractionHandler : public osgGA::GUIEventHandler {
public:
bool handle(const osgGA::GUIEventAdapter& ea,
osgGA::GUIActionAdapter& aa) override;
// 鼠标交互
virtual void onLeftClick(const osg::Vec3d& worldPos);
virtual void onRightClick(const osg::Vec3d& worldPos);
virtual void onDrag(const osg::Vec3d& start,
const osg::Vec3d& end);
// 键盘控制
virtual void onKeyPress(int key);
// 多点触控
virtual void onPinchGesture(double scale,
const osg::Vec2d& center);
private:
// 拾取器
class Picker {
osgUtil::LineSegmentIntersector* createIntersector(
const osg::Vec2d& screenPos);
PickResult pick(const osgGA::GUIEventAdapter& ea);
};
};3.4.2 标绘系统
c
class AnnotationSystem {
public:
// 基本标绘元素
enum AnnotationType {
POINT, // 点
POLYLINE, // 折线
POLYGON, // 多边形
CIRCLE, // 圆
ELLIPSE, // 椭圆
RECTANGLE, // 矩形
ARROW, // 箭头
TEXT, // 文本
MEASURE // 测量
};
// 创建标绘
AnnotationID createAnnotation(AnnotationType type,
const std::vector<osg::Vec3d>& points,
const Style& style);
// 协同标绘
void syncAnnotation(AnnotationID id,
const std::string& userId);
private:
// 标绘渲染器
class AnnotationRenderer {
osg::Node* createPointNode(const osg::Vec3d& pos,
const PointStyle& style);
osg::Node* createLineNode(const std::vector<osg::Vec3d>& points,
const LineStyle& style);
osg::Node* createPolygonNode(const std::vector<osg::Vec3d>& points,
const PolygonStyle& style);
};
};3.5 态势分析与推演模块
3.5.1 空间分析引擎
php
class SpatialAnalyzer {
public:
// 通视分析
bool isLineOfSight(const osg::Vec3d& from,
const osg::Vec3d& to,
double earthRadius = 6371000.0);
// 地形剖面
std::vector<osg::Vec3d> getTerrainProfile(
const osg::Vec3d& start,
const osg::Vec3d& end,
int samples = 100);
// 可视域分析
osg::Image* calculateViewshed(
const osg::Vec3d& viewpoint,
double maxDistance,
double horizontalFOV,
double verticalFOV);
// 最佳路径规划
std::vector<osg::Vec3d> findOptimalPath(
const osg::Vec3d& start,
const osg::Vec3d& end,
const TerrainCostMap& costMap);
};3.5.2 推演引擎
arduino
class SimulationEngine {
public:
// 初始化推演
bool initialize(const Scenario& scenario);
// 运行控制
void start();
void pause();
void stop();
void stepForward(double deltaTime);
// 时间管理
class TimeManager {
enum TimeMode {
REAL_TIME, // 实时
SCALED_TIME, // 比例时间
FAST_FORWARD, // 快进
STEP_BY_STEP // 步进
};
double timeScale_ = 1.0;
TimeMode mode_ = REAL_TIME;
osg::Timer_t startTick_;
};
// 实体行为模型
class BehaviorModel {
virtual void update(Entity& entity, double deltaTime) = 0;
};
class AircraftBehavior : public BehaviorModel {
// 飞行力学模型
void update(Entity& entity, double deltaTime) override;
};
class CombatBehavior : public BehaviorModel {
// 交战规则
void update(Entity& entity, double deltaTime) override;
};
};四、 综合显示方案
4.1 多视图协同显示
4.1.1 视图布局配置
yaml
display_config:
layout_mode: "single|split|multi_monitor"
views:
- id: "3d_main"
type: "3d_perspective"
viewport: [0.0, 0.0, 0.7, 1.0]
camera:
position: [116.3, 39.9, 10000]
heading: 0.0
pitch: -60.0
- id: "2d_map"
type: "2d_orthographic"
viewport: [0.7, 0.5, 0.3, 0.5]
projection: "mercator"
- id: "sensor_view"
type: "first_person"
viewport: [0.7, 0.0, 0.3, 0.5]
attach_to: "selected_entity"4.1.2 主题与样式系统
c
class ThemeManager {
public:
// 加载主题配置
bool loadTheme(const std::string& themeFile);
// 获取样式
const EntityStyle& getEntityStyle(EntityType type,
ForceType force);
// 符号系统
class SymbolSystem {
// MIL-STD-2525/APP-6 标准符号
osg::Node* createTacticalSymbol(
const std::string& sidc,
const osg::Vec3d& position);
// 自定义符号
osg::Node* createCustomSymbol(
const SymbolTemplate& tpl);
};
};4.2 信息面板与HUD
c
class InformationDisplay {
public:
// 实体信息面板
class EntityInfoPanel {
void update(const Entity& entity);
void show();
void hide();
// 显示内容
struct Content {
std::string name;
std::string type;
GeoCoordinate position;
double speed;
double heading;
double altitude;
std::string status;
// ... 其他属性
};
};
// 态势概要面板
class SituationSummary {
void updateStatistics(const Statistics& stats);
struct Statistics {
int totalEntities;
int aircraftCount;
int shipCount;
int vehicleCount;
int activeSensors;
int engagements;
};
};
// 平视显示器 (HUD)
class HeadUpDisplay {
void drawCompass(double heading);
void drawAltimeter(double altitude);
void drawVelocityVector(double speed, double course);
void drawTargetReticle(const osg::Vec3d& targetPos);
};
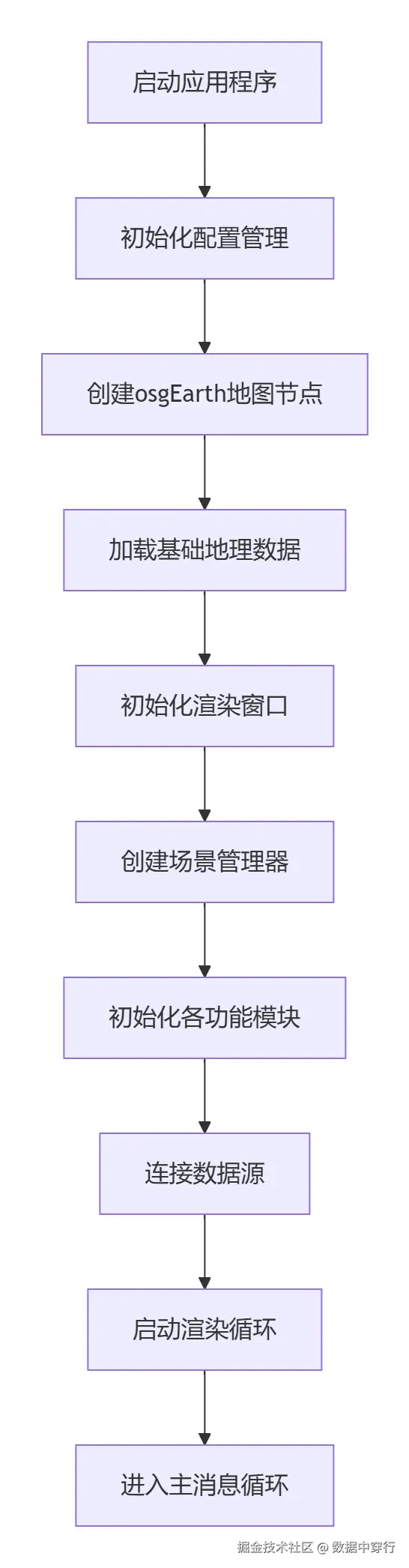
};五、 系统工作流程
5.1 系统启动与初始化流程
5.2 实时数据更新流程
markdown
1. 数据接收线程
↓
2. 原始数据解析与坐标转换
↓
3. 数据有效性校验与过滤
↓
4. 更新实体状态缓冲区
↓
5. 主线程同步(通过回调/消息队列)
↓
6. 应用状态插值/预测
↓
7. 更新场景图节点状态
↓
8. 触发相关事件(如:碰撞检测、规则触发)5.3 渲染帧循环优化流程
scss
// 主渲染循环优化结构
void RenderingThread::runFrame() {
// 阶段1:数据准备(并行)
parallel_for(entities, [&](Entity& e) {
e.predictState(frameInterval);
});
// 阶段2:可见性裁剪
cullTraversal();
// 阶段3:状态排序与批处理
stateSortAndBatching();
// 阶段4:GPU提交
drawImplementation();
// 阶段5:后处理特效
applyPostEffects();
}六、 性能优化方案
6.1 渲染优化技术
6.1.1 多层次细节优化
arduino
class OptimizationManager {
public:
// 1. 基于距离的LOD
void setupDistanceLOD(osg::Node* node,
const LODConfig& config);
// 2. 实例化渲染
void setupInstancing(const std::vector<osg::Matrix>& transforms,
osg::Node* prototype);
// 3. 遮挡裁剪
void enableOcclusionCulling(bool enable);
// 4. 层次Z缓冲
void enableHierarchicalZBuffer(bool enable);
// 5. 延迟着色
void setupDeferredShading(int gBufferWidth,
int gBufferHeight);
// 6. 帧率自适应
void adaptiveQualityControl(double targetFPS);
private:
// 性能监控
struct PerformanceMetrics {
double frameTime;
double cpuTime;
double gpuTime;
int triangleCount;
int drawCalls;
int textureMemory;
};
PerformanceMetrics metrics_;
};6.1.2 数据调度优化
c
class DataScheduler {
public:
// 异步数据加载
void asyncLoadData(const DataRequest& request,
DataCallback callback);
// 预测性预加载
void predictivePreload(const osg::Camera* camera);
// 智能缓存管理
class SmartCache {
LRUCache<std::string, osg::ref_ptr<osg::Node>> terrainCache_;
LFUCache<std::string, osg::ref_ptr<osg::Image>> textureCache_;
void cleanupUnused();
size_t calculateOptimalCacheSize();
};
private:
// 加载优先级队列
class PriorityQueue {
struct Task {
DataRequest request;
int priority; // 0-100, 越高越优先
osg::Timer_t submitTime;
};
std::priority_queue<Task> queue_;
};
};6.2 内存与计算优化
arduino
class MemoryOptimizer {
public:
// 1. 纹理压缩
void compressTextures(CompressionFormat format = DXT5);
// 2. 几何压缩
void compressGeometry(osg::Geometry* geom);
// 3. 顶点缓存对象优化
void optimizeVBO(osg::Geometry* geom);
// 4. 共享状态集
void shareStateSets(osg::Group* scene);
// 5. 内存池管理
template<typename T>
class MemoryPool {
std::vector<T*> pool_;
std::queue<T*> freeList_;
std::mutex mutex_;
T* allocate();
void deallocate(T* obj);
};
// 6. GPU内存管理
class GPUMemoryManager {
size_t usedVRAM_;
size_t totalVRAM_;
std::map<std::string, size_t> resourceSizes_;
bool canAllocate(size_t size);
void defragment();
};
};七、 系统改进与扩展
7.1 可扩展架构设计
7.1.1 插件框架
c
class PluginFramework {
public:
// 插件接口
class IPlugin {
public:
virtual std::string getName() = 0;
virtual bool initialize(PluginContext& ctx) = 0;
virtual void update(double deltaTime) = 0;
virtual void shutdown() = 0;
};
// 插件管理器
class PluginManager {
bool loadPlugin(const std::string& path);
bool unloadPlugin(const std::string& name);
// 插件热插拔支持
void enableHotSwap(bool enable);
private:
std::map<std::string, std::shared_ptr<IPlugin>> plugins_;
std::vector<std::string> searchPaths_;
};
};7.1.2 服务化架构
csharp
class ServiceArchitecture {
public:
// 微服务定义
class MicroService {
public:
virtual void start() = 0;
virtual void stop() = 0;
virtual Json::Value handleRequest(const Json::Value& req) = 0;
};
// 服务发现与注册
class ServiceRegistry {
void registerService(const std::string& name,
const ServiceInfo& info);
ServiceInfo discoverService(const std::string& name);
private:
// 基于gRPC/REST的服务通信
class ServiceClient {
bool connect(const std::string& endpoint);
Json::Value call(const std::string& method,
const Json::Value& params);
};
};
};7.2 AI与智能化增强
c
class AIEnhancement {
public:
// 1. 智能目标识别
class TargetRecognition {
bool identifyTarget(const osg::Image& sensorImage,
std::vector<Detection>& detections);
};
// 2. 行为预测
class BehaviorPrediction {
Trajectory predictTrajectory(const Entity& entity,
double timeHorizon);
};
// 3. 威胁评估
class ThreatAssessment {
ThreatLevel assessThreat(const Entity& target,
const std::vector<Entity>& friends);
};
// 4. 路径规划优化
class PathPlanner {
std::vector<osg::Vec3d> findOptimalPath(
const osg::Vec3d& start,
const osg::Vec3d& end,
const CostMap& costMap,
const Constraints& constraints);
};
// 5. 自然语言交互
class NLUInterface {
Command parseCommand(const std::string& text);
std::string generateReport(const Situation& situation);
};
};7.3 云渲染与分布式架构
c
class CloudRenderingSystem {
public:
// 云端渲染服务
class CloudRenderService {
ImageTile renderView(const ViewRequest& request);
VideoStream startStreaming(const StreamConfig& config);
};
// 边缘计算节点
class EdgeNode {
void processSensorData(const SensorData& data);
void preprocessTerrain(const GeoArea& area);
};
// 分布式同步
class DistributedSync {
void synchronizeState(const std::string& sessionId,
const SystemState& state);
// CRDT (无冲突复制数据类型) 用于协同标绘
class CRDTAnnotation {
void applyOperation(const Operation& op);
std::vector<Operation> getPendingOperations();
};
};
};八、 部署与运维方案
8.1 系统部署架构
scss
生产环境部署方案:
├── 前端显示层
│ ├── 指挥中心大屏 (多屏拼接)
│ ├── 操作员工作站 (Windows/Linux)
│ ├── 移动终端 (Android/iOS)
│ └── Web客户端 (WebGL)
│
├── 应用服务层
│ ├── 态势服务器 (主备)
│ ├── 数据服务器
│ ├── 推演服务器
│ └── 网关服务器
│
├── 数据存储层
│ ├── 地理数据库 (PostGIS)
│ ├── 实时数据库 (Redis/TDengine)
│ ├── 文件存储 (NAS/S3)
│ └── 备份系统
│
└── 网络基础设施
├── 内部高速网络 (10G/40G)
├── 安全隔离网闸
├── 负载均衡器
└── 防火墙/VPN8.2 监控与维护
yaml
monitoring_config:
metrics:
- name: "frame_rate"
threshold: 25.0
action: "reduce_quality"
- name: "memory_usage"
threshold: 80%
action: "cleanup_cache"
- name: "network_latency"
threshold: 100ms
action: "switch_source"
logging:
level: "INFO"
rotation: "daily"
retention: "30days"
alerting:
email: ["admin@example.com"]
sms: ["+8613800138000"]
webhook: "https://hook.example.com/alert"九、 关键技术指标
| 指标项 | 目标值 | 测量方法 |
|---|---|---|
| 最大实体数量 | ≥100,000 | 压力测试 |
| 帧率(FPS) | ≥30 | Fraps/内置计数器 |
| 首帧时间 | <3秒 | 秒表测量 |
| 数据更新延迟 | <100ms | 网络抓包 |
| 内存占用 | <4GB | 任务管理器 |
| CPU占用率 | <70% | 性能监视器 |
| 网络带宽 | <10Mbps | 流量监控 |
| 启动时间 | <15秒 | 秒表测量 |
十、 开发路线图
阶段一:基础平台 (3个月)
- osgEarth引擎集成与定制
- 基础地理数据加载
- 简单实体显示
- 基本交互功能
阶段二:核心功能 (6个月)
- 大规模实体管理
- 实时数据接入
- 高级标绘系统
- 基本空间分析
阶段三:高级特性 (6个月)
- 智能推演引擎
- 分布式协同
- AI增强功能
- 云渲染支持
阶段四:优化完善 (3个月)
- 性能深度优化
- 用户体验改进
- 系统稳定加固
- 文档与培训
总结
本方案设计了一个高性能、可扩展、智能化 的基于osgEarth的综合态势显示系统。通过模块化架构 实现功能解耦,多层次优化 保证性能表现,服务化设计 支持灵活部署。系统不仅满足当前态势显示需求,更为未来的AI集成、云边协同、元宇宙融合等发展方向预留了扩展接口。
成功实施本方案的关键在于:
- 性能优先:始终将渲染性能作为核心指标
- 数据驱动:构建统一的数据模型和接口标准
- 用户体验:注重交互设计和操作效率
- 可维护性:完善的文档、测试和监控体系
- 生态建设:建立插件开发生态,支持第三方扩展
本系统将为指挥决策、应急响应、城市管理等领域提供强大的三维可视化支撑平台。