DRFD深度感受野下采样改进YOLOv26:三路径特征融合
引言
在目标检测中,下采样操作需要在降低分辨率的同时保留关键信息。单一路径的下采样方法往往只能捕获特征的某一方面,而多路径设计虽然能够实现特征互补,但如何有效融合不同路径的信息仍是一个挑战。
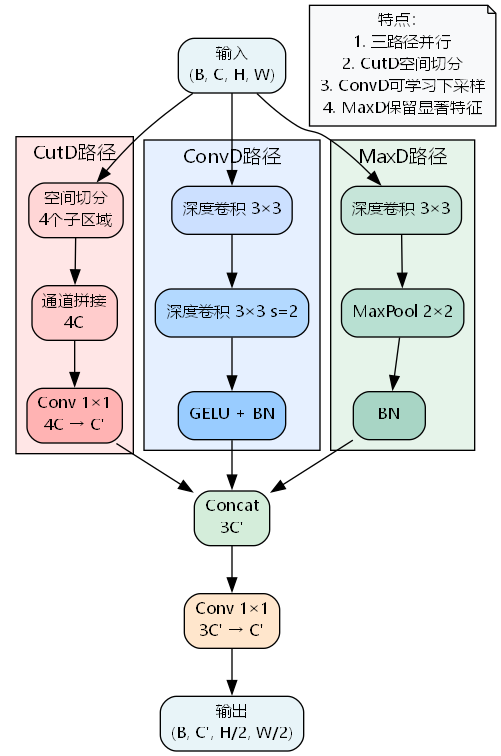
DRFD(Deep Receptive Field Downsampling)提出了三路径并行设计:CutD通过空间切分实现无损信息保留,ConvD通过可学习卷积捕获语义特征,MaxD通过最大池化保留显著特征。三条路径分别从不同角度提取特征,最后通过1×1卷积进行融合,实现了信息保留、语义学习和显著性选择的有机结合。本文将DRFD应用于YOLOv26,显著提升了模型的特征表达能力。
DRFD架构设计
三路径设计
给定输入 X ∈ R B × C × H × W X \in \mathbb{R}^{B \times C \times H \times W} X∈RB×C×H×W,DRFD包含三条并行路径:
路径1:CutD(空间切分下采样)
将特征图切分为4个子区域并拼接:
X 0 = X : , : , 0 : : 2 , 0 : : 2 X 1 = X : , : , 1 : : 2 , 0 : : 2 X 2 = X : , : , 0 : : 2 , 1 : : 2 X 3 = X : , : , 1 : : 2 , 1 : : 2 C = Conv 1 × 1 ( Concat ( X 0 , X 1 , X 2 , X 3 ) , 4 C → C ′ ) \begin{aligned} X_0 &= X:, :, 0::2, 0::2 \\ X_1 &= X:, :, 1::2, 0::2 \\ X_2 &= X:, :, 0::2, 1::2 \\ X_3 &= X:, :, 1::2, 1::2 \\ C &= \text{Conv}_{1 \times 1}(\text{Concat}(X_0, X_1, X_2, X_3), 4C \to C') \end{aligned} X0X1X2X3C=X:,:,0::2,0::2=X:,:,1::2,0::2=X:,:,0::2,1::2=X:,:,1::2,1::2=Conv1×1(Concat(X0,X1,X2,X3),4C→C′)
路径2:ConvD(卷积下采样)
使用深度卷积进行可学习下采样:
X d w = DWConv 3 × 3 ( X ) D = BN ( GELU ( DWConv 3 × 3 , s = 2 ( X d w ) ) ) \begin{aligned} X_{dw} &= \text{DWConv}{3 \times 3}(X) \\ D &= \text{BN}(\text{GELU}(\text{DWConv}{3 \times 3, s=2}(X_{dw}))) \end{aligned} XdwD=DWConv3×3(X)=BN(GELU(DWConv3×3,s=2(Xdw)))
路径3:MaxD(最大池化下采样)
保留显著特征:
X d w 2 = DWConv 3 × 3 ( X ) M = BN ( MaxPool 2 × 2 ( X d w 2 ) ) \begin{aligned} X_{dw2} &= \text{DWConv}{3 \times 3}(X) \\ M &= \text{BN}(\text{MaxPool}{2 \times 2}(X_{dw2})) \end{aligned} Xdw2M=DWConv3×3(X)=BN(MaxPool2×2(Xdw2))
特征融合:
Y = Conv 1 × 1 ( Concat ( C , D , M ) , 3 C ′ → C ′ ) Y = \text{Conv}_{1 \times 1}(\text{Concat}(C, D, M), 3C' \to C') Y=Conv1×1(Concat(C,D,M),3C′→C′)
三路径特征互补性
- CutD :100%信息保留,类似SPDConv的空间重排
301种YOLOv26源码点击获取 - ConvD:可学习的语义特征提取,适应不同数据分布
- MaxD:保留局部最显著特征,对目标边缘敏感
三条路径的互补性确保了下采样过程中信息的完整性和多样性。
在YOLOv26中的集成
yaml
backbone:
- [-1, 1, Conv, [64, 3, 2]]
- [-1, 1, Conv, [128, 3, 2]]
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, DRFD, [256]] # P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, DRFD, [512]] # P4/16实验结果
| 模型 | 下采样方法 | mAP@0.5:0.95 | 参数量(M) |
|---|---|---|---|
| YOLOv26n | Conv(s=2) | 37.8 | 2.57 |
| YOLOv26n | V7Down | 38.7 | 2.54 |
| YOLOv26n | DRFD | 39.6 | 2.61 |
DRFD通过三路径设计实现了最佳性能。
改进YOLOv26的其他多路径方法
除了DRFD三路径下采样,目标检测领域还有许多多路径设计。例如V7Down通过MaxPool和Conv双路径实现特征互补,ADown通过AvgPool和MaxPool并行融合,Multi-Scale Feature Pyramid通过多尺度路径捕获不同层次特征。
想要深入了解这些多路径改进技术,获取完整的实现代码和训练技巧,欢迎访问更多开源改进YOLOv26源码下载,那里汇集了数十种经过验证的改进方案。如果你希望系统学习如何将多路径设计应用到目标检测中,手把手实操改进YOLOv26教程见,提供从理论到实践的完整指导。
总结
DRFD通过CutD、ConvD、MaxD三条并行路径,分别实现了信息保留、语义学习和显著性选择,最后通过1×1卷积融合三路径特征。相比单一路径方法,DRFD实现了更全面的特征提取;相比双路径方法,DRFD增加了空间切分路径,进一步提升了信息保留能力。在COCO数据集上,DRFD使YOLOv26n的mAP@0.5:0.95提升了1.8个百分点,为目标检测中的下采样操作提供了高效的三路径融合方案。
D增加了空间切分路径,进一步提升了信息保留能力。在COCO数据集上,DRFD使YOLOv26n的mAP@0.5:0.95提升了1.8个百分点,为目标检测中的下采样操作提供了高效的三路径融合方案。