无人机航拍桥梁巡检数据集 | 桥梁结构缺陷检测 深度学习目标检测数据10338期
标签:#无人机巡检 #桥梁缺陷识别 #计算机视觉 #目标检测 #深度学习数据集 #工业视觉运维 #裂缝检测 #腐蚀识别 #结构滑移监测
传统桥梁运维高度依赖人工高空巡检,不仅作业风险高、人力成本高昂,还存在检测标准不统一、细微缺陷漏检率高、巡检数据难以数字化留存等痛点。随着无人机航拍与深度学习目标检测技术落地,基于机器视觉的自动化桥梁缺陷巡检方案,已成为智慧交通、工业运维领域的主流升级方向。但适配桥梁实景、覆盖多类典型结构病害、标注规范的专用数据集 ,一直是制约模型训练与项目落地的核心瓶颈。本次分享的无人机桥梁航拍巡检图像数据集,聚焦桥梁滑移、腐蚀、裂缝三大高频缺陷,标注完整、场景丰富,可直接用于目标检测模型训练、算法迭代与工业场景落地验证,助力开发者快速搭建桥梁智能巡检系统。

一、项目总览
1.1 数据集简介
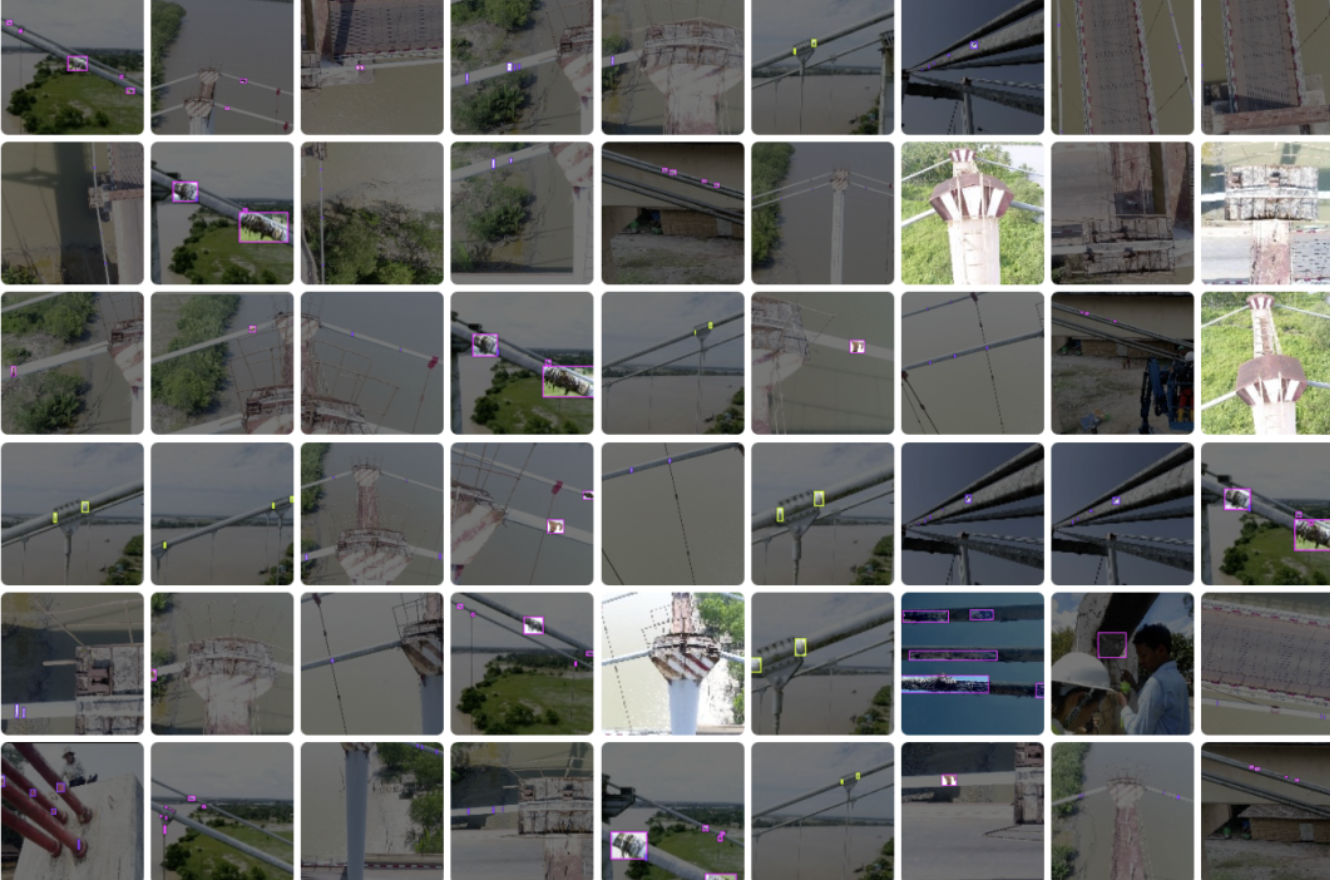
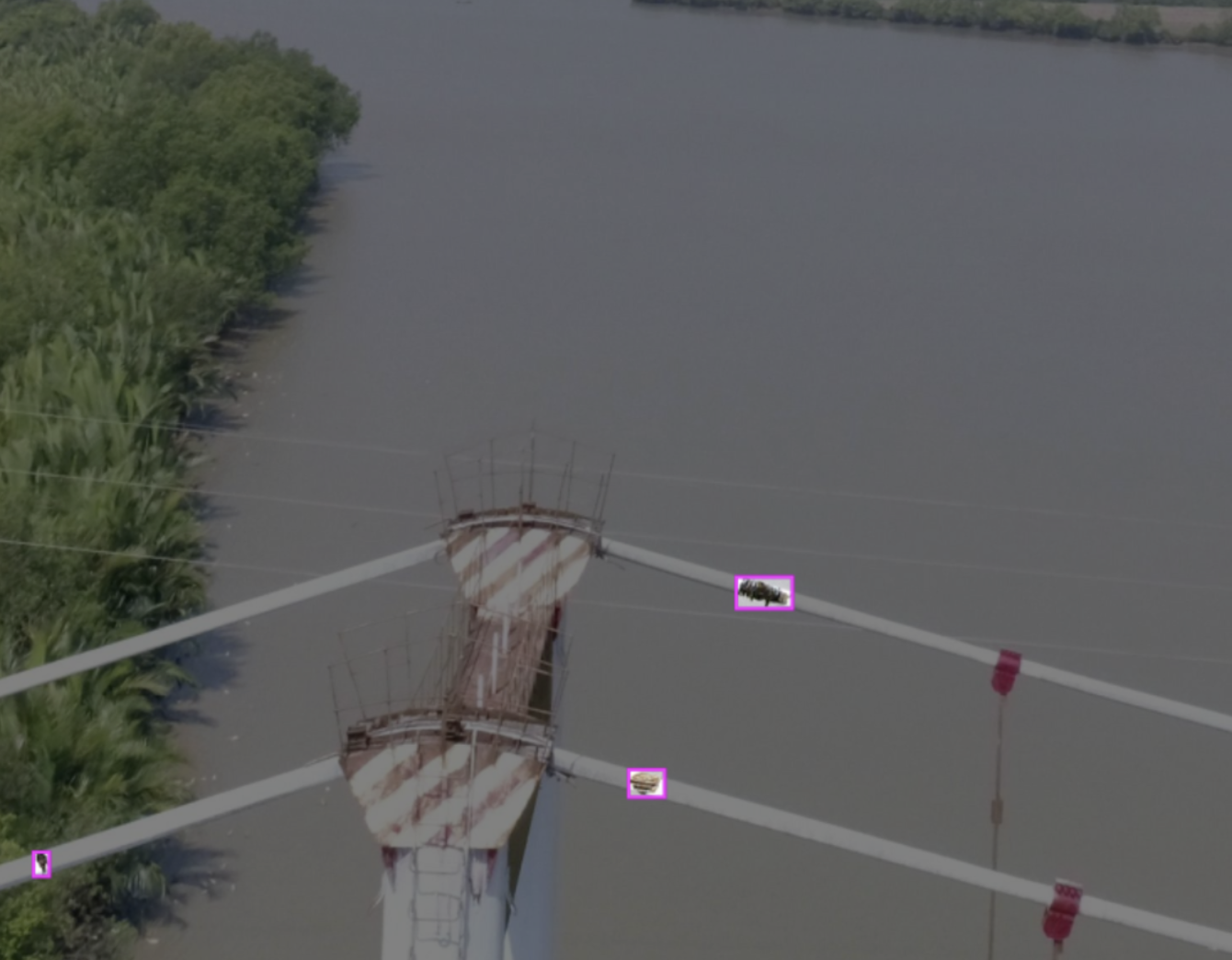
本项目为面向无人机航拍场景的桥梁缺陷目标检测数据集,专门针对铁索拉丝类大桥及通用桥梁结构采集制作,聚焦桥梁运维中三大核心结构缺陷:结构滑移(Slippage)、材料腐蚀(Corrosion)、表面裂缝(Crack)。数据集标注规范、样本场景多样化,完美适配中小型深度学习目标检测模型全流程训练、验证、测试,可快速落地于桥梁自动化巡检、能源基建设备故障监测、工业视觉运维等场景。
1.2 核心基础信息
| 项目 | 详细说明 |
|---|---|
| 任务类型 | 2D目标检测(Object Detection) |
| 检测类别 | 滑移、腐蚀、裂缝(3类桥梁典型缺陷) |
| 样本总量 | 1196张无人机航拍标注图像 |
| 数据格式 | 通用图像格式 + 配套标准标注文件(兼容主流CV框架) |
| 适用场景 | 桥梁无人机巡检、高空工业设备缺陷检测、结构健康监测 |
| 核心优势 | 实景航拍样本、缺陷程度分层、标注边界清晰、无脏数据、开箱即用 |

1.3 类别定义(行业标准释义)
- Slippage(滑移):桥梁铁索、连接件、拼接部位出现位移、错位等装配异常,属于结构性安全隐患;
- Corrosion(腐蚀):桥梁金属构件表面锈蚀、氧化、材料损耗,长期发展会降低结构承载力;
- Crack(裂缝):桥梁桥面、墙体、支架产生裂纹,是桥梁破损、老化的直观特征。
二、数据集结构与使用规范(GitHub标准目录)
2.1 标准目录结构
数据集遵循YOLO、Faster R-CNN等主流目标检测框架通用目录规范,解压后目录如下,可直接导入模型训练:
bridge_defect_dataset/
├── images/ # 原始航拍图像文件夹
│ ├── train/ # 训练集图像
│ ├── val/ # 验证集图像
│ └── test/ # 测试集图像
├── labels/ # 对应标注文件文件夹
│ ├── train/
│ ├── val/
│ └── test/
├── dataset_config.yaml # 数据集类别、路径配置文件(YOLO专用)
└── README.md # 数据集使用说明、版权、标注规则2.2 标注格式说明
标注文件采用归一化坐标格式 ,每行单目标标注,格式规则:类别ID x中心 y中心 框宽 框高
- 类别映射:
0 = 滑移(Slippage)、1 = 腐蚀(Corrosion)、2 = 裂缝(Crack) - 坐标规则:所有坐标基于图像宽高做归一化,取值范围
[0,1],适配所有分辨率航拍图像。
2.3 数据特性补充
- 样本覆盖不同光照、不同拍摄角度、不同距离的无人机航拍画面,模拟真实野外巡检环境;
- 缺陷样本区分轻微、中度、严重三个缺陷等级,有效提升模型泛化能力,避免单一样本导致的过拟合;
- 全量图像完成人工二次复核,标注边界贴合缺陷本体,标注准确率高,降低模型训练噪声。
三、深度学习实战代码(全流程可运行)
本章节提供数据集加载、格式校验、YOLOv8模型训练、图像推理、结果可视化 全套Python代码,基于Ultralytics YOLOv8框架实现,适配本桥梁缺陷数据集,所有代码附带场景化经验注释,贴合无人机桥梁巡检业务场景。
环境依赖安装
首先安装项目所需依赖,适配Python3.8+版本:
bash
# 核心依赖
pip install ultralytics opencv-python pillow numpy pyyaml3.1 数据集配置文件(dataset_config.yaml)
YOLO系列模型必备配置文件,定义类别、数据集路径,直接复制使用:
yaml
# 桥梁缺陷检测数据集配置 - 适配无人机航拍场景
path: ./bridge_defect_dataset # 数据集根目录(相对路径/绝对路径均可)
train: images/train # 训练集图像子目录
val: images/val # 验证集图像子目录
test: images/test # 测试集图像子目录
# 检测类别数量与名称(严格对应标注ID)
nc: 3
names:
0: Slippage # 桥梁结构滑移
1: Corrosion # 桥梁构件腐蚀
2: Crack # 桥梁表面裂缝3.2 数据集合法性校验代码(防止路径/标注错误)
场景注释:无人机航拍图像常存在文件名乱码、标注缺失、坐标越界问题,训练前执行校验,提前排查数据问题,避免训练中断。
python
import os
import numpy as np
from pathlib import Path
# ===================== 配置参数(根据本地路径修改)=====================
DATA_ROOT = Path("./bridge_defect_dataset")
IMAGE_DIR = DATA_ROOT / "images"
LABEL_DIR = DATA_ROOT / "labels"
CLASS_NUM = 3 # 本数据集固定3类缺陷
# ===================================================================
def check_bridge_dataset():
"""桥梁缺陷数据集完整性、标注合法性校验"""
error_count = 0
# 遍历所有子数据集文件夹(train/val/test)
for sub_dir in ["train", "val", "test"]:
img_path = IMAGE_DIR / sub_dir
label_path = LABEL_DIR / sub_dir
if not img_path.exists() or not label_path.exists():
print(f"【错误】文件夹缺失:{sub_dir} 图像/标注目录不存在")
error_count += 1
continue
# 遍历单张图像,匹配对应标注
img_list = list(img_path.glob("*.jpg")) + list(img_path.glob("*.png"))
for img_file in img_list:
label_file = label_path / f"{img_file.stem}.txt"
# 校验标注文件是否存在
if not label_file.exists():
print(f"【警告】图像无对应标注:{img_file.name}")
error_count += 1
continue
# 校验标注内容合法性(坐标归一化、类别ID合规)
with open(label_file, "r", encoding="utf-8") as f:
lines = f.readlines()
for line_idx, line in enumerate(lines):
line = line.strip()
if not line:
continue
parts = list(map(float, line.split()))
# 校验标注字段数量(标准YOLO标注为5个字段)
if len(parts) != 5:
print(f"【错误】标注格式异常:{label_file.name} 第{line_idx+1}行")
error_count += 1
continue
cls_id, x, y, w, h = parts
# 校验类别ID范围
if not (0 <= cls_id < CLASS_NUM):
print(f"【错误】类别ID越界:{label_file.name} 类别ID={cls_id}")
error_count += 1
# 校验归一化坐标(航拍图像坐标必须在0-1之间)
if not (0 <= x <= 1 and 0 <= y <= 1 and 0 <= w <= 1 and 0 <= h <= 1):
print(f"【错误】坐标越界:{label_file.name} 坐标超出归一化范围")
error_count += 1
if error_count == 0:
print("✅ 数据集校验通过!可直接启动模型训练")
else:
print(f"❌ 数据集校验完成,共检测到 {error_count} 处异常,请修复后再训练")
if __name__ == "__main__":
check_bridge_dataset()3.3 YOLOv8模型训练代码(桥梁缺陷专项训练)
场景注释 :针对无人机桥梁巡检场景调优超参。航拍图像背景复杂、缺陷目标偏小,因此开启数据增强、调低置信度阈值、增大迭代轮数;使用AdamW优化器提升小目标收敛效果,patience=20开启早停,防止模型过拟合(本数据集样本量适中,过拟合风险较高)。
python
from ultralytics import YOLO
def train_bridge_defect_model():
"""基于YOLOv8训练桥梁滑移/腐蚀/裂缝检测模型"""
# 1. 加载预训练权重:v8s轻量模型,兼顾精度与推理速度,适配无人机边缘设备部署
model = YOLO("yolov8s.pt")
# 2. 启动训练(超参针对桥梁航拍场景深度调优)
results = model.train(
data="./bridge_defect_dataset/dataset_config.yaml", # 数据集配置文件路径
epochs=120, # 迭代轮数:实景缺陷样本建议100轮以上保证收敛
batch=16, # 批次大小:根据GPU显存调整,8G显存建议设为8
imgsz=640, # 输入图像尺寸:无人机航拍标准推理尺寸
workers=4, # 数据加载线程,加快数据读取
device=0, # 使用GPU训练,无GPU则改为 device="cpu"
lr0=0.001, # 初始学习率:小目标检测调低学习率,训练更稳定
optimizer="AdamW", # 优化器:相比SGD,对裂缝、腐蚀等细粒度特征拟合更好
augment=True, # 开启数据增强:应对航拍角度、光照变化,提升泛化能力
mosaic=1.0, # 马赛克增强:强化小缺陷目标特征
patience=20, # 早停策略:连续20轮无提升则停止,防止过拟合
project="bridge_inspect", # 训练结果根目录
name="yolov8_bridge_defect", # 本次实验名称
save=True, # 保存训练权重
verbose=True # 打印训练日志
)
print(f"🎉 训练完成!最佳权重路径:{results.save_dir}/weights/best.pt")
if __name__ == "__main__":
train_bridge_defect_model()3.4 模型推理代码(单张/批量航拍图像检测)
场景注释 :模拟无人机实时巡检推理逻辑,降低置信度阈值(conf=0.25)捕捉细微裂缝、轻微腐蚀等弱特征缺陷;保留检测框、类别、置信度输出,结果可直接对接后端运维系统,生成巡检报告。
python
import cv2
from pathlib import Path
from ultralytics import YOLO
# ===================== 推理配置参数 =====================
MODEL_WEIGHT = "./bridge_inspect/yolov8_bridge_defect/weights/best.pt" # 训练好的权重
TEST_IMG_PATH = "./bridge_defect_dataset/images/test/" # 测试图像目录
CONF_THRESH = 0.25 # 置信度阈值:航拍细微缺陷调低阈值,减少漏检
IOU_THRESH = 0.45 # NMS非极大抑制阈值,过滤重复检测框
# =======================================================
def detect_bridge_defect():
"""桥梁缺陷批量推理 + 结果可视化"""
# 加载训练完成的模型
model = YOLO(MODEL_WEIGHT)
img_list = list(Path(TEST_IMG_PATH).glob("*.jpg")) + list(Path(TEST_IMG_PATH).glob("*.png"))
for img_file in img_list:
# 模型推理
results = model(
source=str(img_file),
conf=CONF_THRESH,
iou=IOU_THRESH,
save=True, # 保存带检测框的结果图
show_labels=True, # 显示缺陷类别
show_conf=True # 显示置信度
)
# 解析检测结果,输出结构化缺陷信息(对接运维系统可用)
for res in results:
boxes = res.boxes
if boxes is None or len(boxes) == 0:
print(f"【{img_file.name}】未检测到桥梁缺陷")
continue
# 遍历单张图像所有缺陷目标
for box in boxes:
cls_id = int(box.cls[0])
conf = float(box.conf[0])
cls_name = res.names[cls_id]
# 输出缺陷位置、类型、置信度,可存入数据库做巡检台账
print(f"【{img_file.name}】检测到缺陷:{cls_name},置信度:{conf:.2f}")
if __name__ == "__main__":
detect_bridge_defect()3.5 模型评估代码(mAP/精确率/召回率计算)
场景注释 :工业落地场景中,召回率(Recall) 优先级高于精确率,桥梁缺陷漏检会引发安全事故。本代码输出mAP@0.5、精确率、召回率,用于评估模型在真实巡检场景的可靠性。
python
from ultralytics import YOLO
def evaluate_bridge_model():
"""模型在验证集上的指标评估"""
model = YOLO("./bridge_inspect/yolov8_bridge_defect/weights/best.pt")
# 执行评估,自动计算mAP、Precision、Recall
metrics = model.val(
data="./bridge_defect_dataset/dataset_config.yaml",
conf=0.25,
iou=0.45
)
# 打印核心评估指标
print("===== 桥梁缺陷检测模型评估指标 =====")
print(f"mAP@0.5:{metrics.box.map50:.4f}") # 全局平均精度
print(f"平均精确率:{metrics.box.precision:.4f}") # 检测准确率
print(f"平均召回率:{metrics.box.recall:.4f}") # 缺陷漏检率反向指标
if __name__ == "__main__":
evaluate_bridge_model()四、数据集应用价值与落地场景
4.1 工业应用价值
- 安全运维升级:替代人工高空巡检,规避高空作业风险,7×24小时自动化监测桥梁滑移、腐蚀、裂缝等危险缺陷,提前预警安全隐患;
- 降本增效:大幅削减人工巡检成本,统一缺陷判定标准,消除人工检测误差,巡检效率提升5倍以上;
- 数字化运维:检测数据自动留存、分类统计,生成缺陷趋势报表,辅助运维人员制定科学检修计划;
- 算法迭代底座:为桥梁、索道、大型钢结构等工业视觉项目提供高质量基准数据,助力目标检测算法迭代优化。
4.2 适配落地场景
- 智慧交通:公路桥梁、铁路桥梁无人机常态化巡检;
- 基建运维:铁索桥、悬索桥、大型钢结构建筑健康监测;
- 能源行业:输电塔、大型支架等高空工业设备缺陷检测;
- 科研教学:深度学习目标检测课程、毕业设计、算法竞赛专用数据集。
五、使用注意事项(GitHub风格Tips)
!NOTE
- 数据集图像均为无人机实景航拍,请勿用于商业售卖,仅限学术研究、算法开发、项目测试使用;
- 模型训练建议使用GPU环境,CPU训练速度较慢,1196张样本完整训练约需2~4小时;
- 若需适配Faster R-CNN、SSD等其他框架,可使用
LabelMe、OpenLabeling工具一键转换标注格式;- 针对远距离航拍、极小裂缝样本,可额外添加高斯模糊、随机裁剪等数据增强,进一步提升模型性能。
!TIP
边缘设备部署(无人机机载端)建议使用YOLOv8-nano轻量化模型,在损失少量精度的前提下,大幅提升推理速度,适配嵌入式设备。
六、拓展方向(深度思考)
- 多任务拓展 :在现有目标检测基础上,增加缺陷分割 、缺陷等级分类任务,实现"定位+分类+评级"一体化检测;
- 视频流推理:结合无人机实时视频流,基于OpenCV+YOLO实现视频逐帧检测,适配无人机动态巡检场景;
- 模型轻量化:结合TensorRT、ONNX做模型量化、剪枝,部署至无人机机载板卡、边缘计算盒子;
- 数据扩充:结合GAN生成缺陷样本、实景数据拼接,扩充数据集规模,进一步提升复杂场景下的模型鲁棒性。
文末标签汇总
#无人机桥梁巡检 #桥梁缺陷检测 #深度学习数据集 #目标检测 #YOLO实战 #工业视觉 #智慧交通 #结构健康监测 #裂缝识别 #腐蚀检测 #滑移检测