有需要本项目的代码、文档、完整资源,或者需要部署调试的朋友,可以私信博主。
1 项目简介
最近整理了一个红外图像行人检测方向的完整项目,核心内容是基于 YOLOv8 和 Faster R-CNN 完成低照度、夜间或复杂监控场景下的行人目标检测,并进一步开发了一个可以直接演示的 PyQt5 图形化检测系统。整个项目不是只停留在模型训练层面,而是从数据准备、标注格式转换、模型训练、模型对比、结果可视化到桌面端界面展示都做了完整串联。
项目主要面向红外图像中的行人识别任务。红外图像与普通可见光图像不同,目标轮廓相对明显,但纹理细节弱、背景层次少,在远距离小目标、遮挡、热源干扰等情况下容易出现漏检或误检。因此,项目中同时引入了单阶段检测模型 YOLOv8 和两阶段检测模型 Faster R-CNN,用同一类红外行人数据进行训练和评估,最后结合指标和运行速度选择 YOLOv8 作为界面端主要检测模型。
系统端支持图片检测、视频检测、摄像头实时检测和检测日志记录。用户可以在界面中导入红外图像或视频,系统会自动完成行人框选、置信度显示、目标数量统计、坐标展示和结果保存。检测到目标后还可以触发声音提示,比较适合做安全监控、夜间巡检、园区通行预警等场景的原型展示。
2 项目背景与应用场景
在实际监控场景中,很多行人检测任务并不发生在光照条件理想的白天。比如夜间道路、厂区门岗、停车场、乡村路口、低照度园区通道等环境,可见光摄像头容易受到光照不足、逆光、雾霾、阴影和噪声干扰。红外成像能够利用热辐射信息获取人体目标轮廓,在弱光甚至无光环境下仍然具备较好的感知能力。
这个项目围绕红外行人检测展开,重点解决的是"看得见"和"识别准"的问题。前者依赖红外图像本身对人体热源的成像优势,后者依赖深度学习目标检测模型对行人区域的定位能力。项目中使用的检测模型可以在红外图像中自动输出目标边界框,并给出类别、置信度和空间坐标,为后续报警、统计、跟踪或联动控制提供基础。
从应用角度看,这类项目可以延伸到智慧安防、夜间巡逻、无人值守监控、道路交通感知、工地安全管理、养老院夜间看护等方向。对于课程设计和毕业设计来说,它也比较适合展示深度学习模型训练、目标检测算法对比、桌面端系统开发和可视化交互等综合能力。
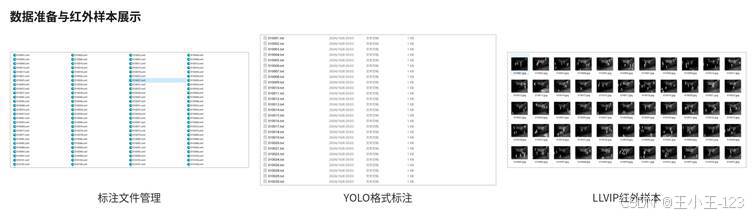
图 1 数据准备与红外样本展示
3 项目整体功能介绍
整个系统可以理解为"算法训练 + 检测应用 + 可视化展示"的组合。算法侧完成红外图像数据处理、模型训练、模型评估和结果对比;应用侧通过 PyQt5 封装检测功能,让用户可以用更直观的方式调用模型,而不需要直接操作命令行或训练脚本。
• 数据准备:完成红外图像整理、LabelImg 标注、VOC XML 与 YOLO TXT 格式转换,保证不同检测框架能够使用同一批数据。
• 模型训练:分别训练 YOLOv8 和 Faster R-CNN,观察训练损失、精确率、召回率、mAP 等指标变化。
• 模型预测:支持对单张图片、视频文件和摄像头画面进行行人检测,输出检测框、类别、置信度和坐标。
• 结果展示:通过曲线图、混淆矩阵、PR 曲线、检测效果图等形式展示模型训练和预测效果。
• 桌面界面:提供图像导入、视频导入、摄像头启动、检测结果表格、日志记录、保存与退出等常用功能。
• 报警提示:当系统识别到行人目标时,可以触发声音提醒,增强项目的实际应用感。
功能设计上没有把项目做成单纯的论文实验,而是尽量接近一个可运行、可演示、可扩展的小型智能检测系统。前期模型负责"检测能力",后期界面负责"使用体验",两部分结合后更适合答辩展示和项目宣传。
4 技术路线与开发环境
项目整体技术路线比较清晰,主要由数据处理、模型训练、模型评估、界面调用和结果记录五个环节组成。红外图像先经过标注和格式转换,随后分别适配 YOLOv8 与 Faster R-CNN 的训练流程。训练完成后,根据模型指标、推理速度和模型体积进行综合对比,再将效果更适合实时展示的模型接入 PyQt5 界面。
|---------|----------------------------------------|
| 技术类别 | 主要内容 |
| 开发语言 | Python |
| 深度学习框架 | PyTorch、TorchVision、Ultralytics YOLOv8 |
| 图像处理工具 | OpenCV、PIL、NumPy、Matplotlib |
| 检测模型 | YOLOv8、Faster R-CNN(ResNet50 + FPN) |
| 标注与数据处理 | LabelImg、VOC XML、YOLO TXT、标注格式转换脚本 |
| 系统界面 | PyQt5、QSS 样式、QTableWidget 日志表格 |
| 可视化内容 | 混淆矩阵、F1 曲线、PR 曲线、训练损失曲线、检测效果图 |
表 1 项目核心技术栈概览
这里没有把完整环境依赖和部署命令全部展开,实际项目中只需要根据显卡、CUDA、PyTorch 版本进行适配即可。对于普通课程设计或毕业设计场景,重点是保证模型可以训练、界面可以启动、检测结果可以稳定展示。
5 系统功能模块展示
5.1 数据标注与格式转换模块
目标检测任务离不开高质量标注。项目中先使用 LabelImg 对红外行人目标进行标注,基础标注格式采用 VOC XML,随后通过脚本转换为 YOLO 所需的 TXT 格式。这样做的好处是同一批数据可以同时适配 YOLOv8 和 Faster R-CNN,便于后续横向对比。
在转换过程中,边界框坐标需要完成绝对像素坐标与归一化中心点坐标之间的转换,同时还要处理越界框、空框、无效宽高等问题。文章展示中只保留了整体处理思路,完整脚本和数据组织方式不直接展开,避免把项目资源一次性全部公开。
5.2 YOLOv8 检测模块
YOLOv8 是项目中的主力检测模型。它采用单阶段检测思路,可以直接在特征图上完成目标类别和边界框预测,相比两阶段模型更适合实时检测场景。项目中使用轻量版本作为基础权重,在红外行人数据上进行迁移训练,兼顾速度和检测效果。
从结构上看,YOLOv8 使用 C2f 模块增强特征流动,通过 PANet 结构进行多尺度特征融合,并采用解耦检测头分别处理分类和回归任务。红外图像中的行人目标尺度差异较大,既有近距离大目标,也有远距离小目标,多尺度特征融合对提高检测稳定性比较关键。
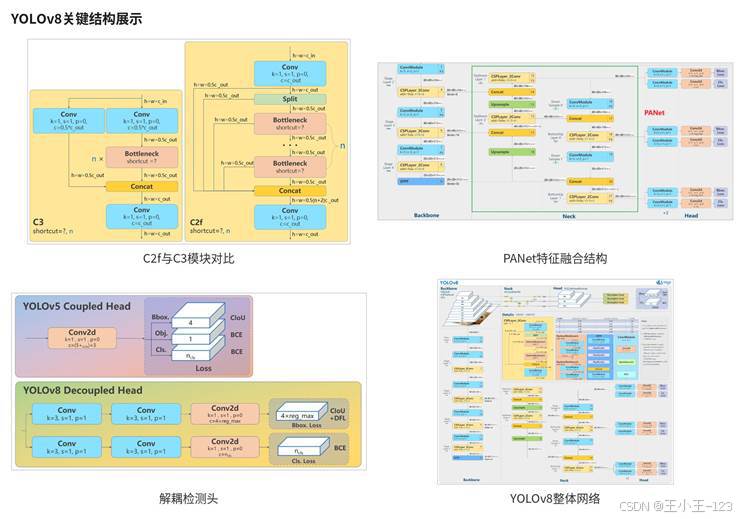
图 2 YOLOv8关键结构展示
5.3 Faster R-CNN 对比模块
为了让项目结果更有说服力,除了 YOLOv8 之外,还引入了 Faster R-CNN 作为对比模型。Faster R-CNN 属于典型两阶段目标检测框架,先通过区域提议网络生成候选框,再通过检测头进行分类和边界框精修。它在定位任务中有较强的表达能力,但推理速度和模型体积通常不如轻量化单阶段模型。
项目中使用相同数据来源完成训练和测试,重点比较 mAP、Precision、Recall、F1、推理耗时和模型大小等指标。对比后可以更直观地说明为什么在桌面端演示和实时检测场景中更倾向于选择 YOLOv8。
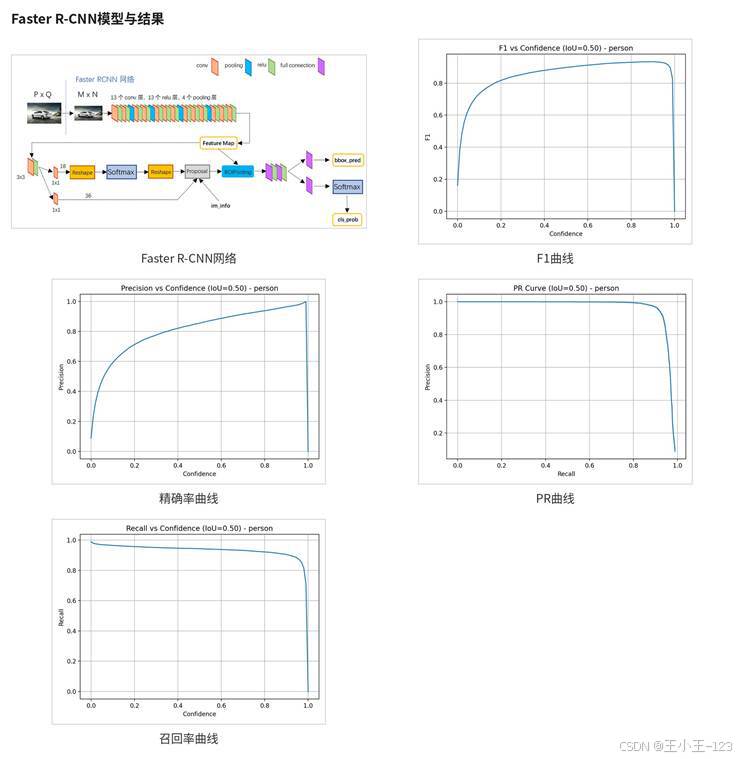
图 3 Faster R-CNN模型结构与评估曲线
5.4 图像、视频与摄像头检测模块
界面端提供了多种输入方式。用户可以导入单张红外图片进行快速检测,也可以导入视频文件观察连续帧检测效果,还可以打开摄像头进行实时画面检测。对于演示场景来说,多输入方式能够明显提升项目完整度,不会给人一种"只能跑一张测试图"的感觉。
检测结果会直接绘制在图像区域中,行人目标以矩形框标注,旁边显示类别和置信度。右侧信息面板同步显示检测耗时、目标数量、目标类别、置信度和坐标位置,用户切换下拉框后还能查看不同目标的具体信息。
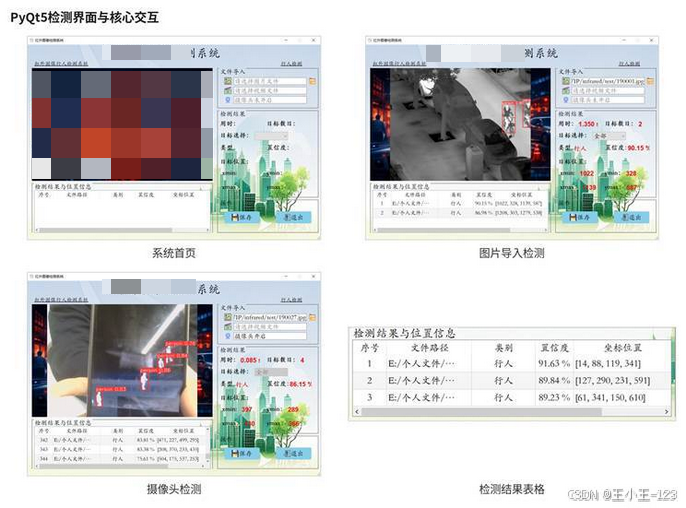
图 4 PyQt5检测界面与核心交互
5.5 检测结果与日志管理模块
为了方便结果追溯,系统设计了检测结果表格和日志记录功能。每次检测完成后,表格会记录序号、文件路径、类别、置信度和坐标信息。批量检测或视频检测时,最新结果会持续追加到表格中,便于后续查看。
日志记录在实际应用中很有价值。比如夜间监控场景下,只要系统检测到行人,就可以把时间、文件、置信度和位置信息记录下来,后续可以结合报警、截图保存、视频片段截取等功能继续扩展。

图 5 检测结果与日志记录展示
6 核心算法与实现思路
项目整体算法流程可以概括为:红外图像采集与整理 → 数据标注 → 格式转换 → 数据增强 → 模型训练 → 模型评估 → 模型推理 → 结果可视化与界面展示。这个流程比较适合初学者理解目标检测项目的完整闭环,也便于后期替换模型或扩展新的检测类别。
在 YOLOv8 训练中,模型会对输入图像进行尺寸统一、归一化和在线数据增强。训练过程中重点关注边界框损失、分类损失和定位相关损失的变化,同时通过 Precision、Recall、F1 和 mAP 等指标判断模型是否稳定收敛。红外图像虽然颜色信息较少,但行人轮廓和热源特征比较明显,经过迁移训练后模型能够较快学习到有效特征。
Faster R-CNN 的实现思路与 YOLOv8 不同,它会先生成大量候选区域,再对候选区域进行分类和回归。这个过程在理论上更加细致,但在推理阶段会带来额外计算开销。实验结果也能看到,Faster R-CNN 的精确率表现不错,但召回率、速度和模型体积方面不如 YOLOv8 均衡。
综合模型效果后,项目最终将 YOLOv8 作为界面端主要检测模型。这样的选择更贴近实际应用:桌面端系统需要用户导入图片、视频或摄像头后迅速看到结果,如果模型响应过慢,会影响演示体验和实时预警效果。
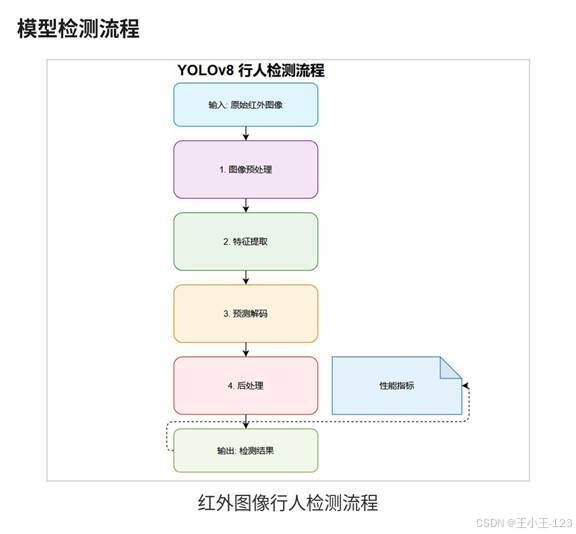
图 6 红外图像行人检测流程
7 项目运行效果展示
从训练过程来看,YOLOv8 的损失曲线整体下降比较平稳,验证指标逐渐提升,说明模型能够稳定学习红外行人目标特征。训练后生成的混淆矩阵、F1 曲线、Precision-Recall 曲线和 Recall-Confidence 曲线可以较好反映模型在不同置信度阈值下的表现。
在独立测试和验证图像上,模型能够对大多数行人目标完成框选,近距离目标和中等尺度目标检测效果比较直观,小目标和遮挡目标也有一定识别能力。对于极端小目标、严重遮挡、运动模糊等情况,仍然存在继续优化空间,这也是红外行人检测任务本身的难点。
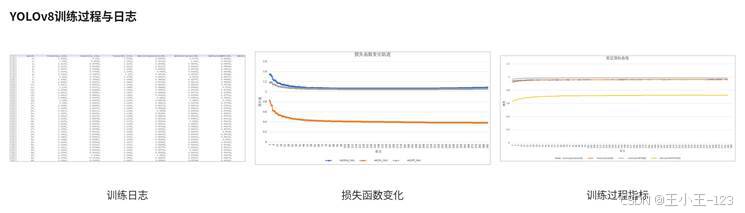
图 7 YOLOv8训练过程与日志展示
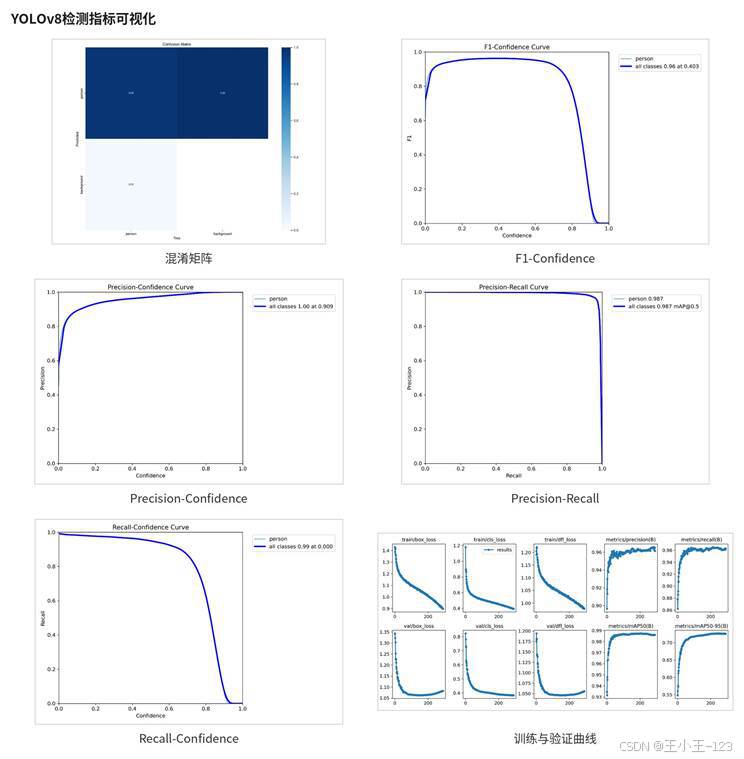
图 8 YOLOv8综合指标曲线展示
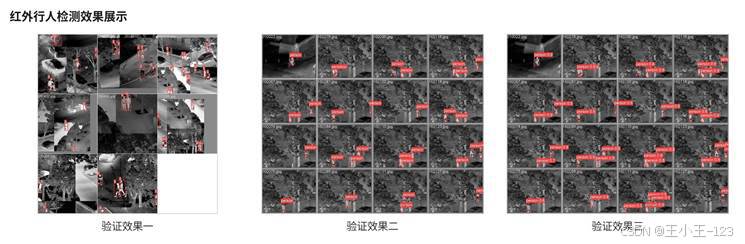
图 9 红外行人检测验证效果展示
界面端运行效果比较适合展示。左侧是检测画面,右侧是输入控制和检测信息,下方是结果表格。导入图片后,系统会自动完成检测并把结果写入表格;开启摄像头后,系统可以持续处理画面帧;如果检测到行人,界面中的目标数量、置信度、坐标和日志会同步更新。
8 项目亮点
• 项目链路完整:覆盖数据标注、模型训练、指标评估、结果展示和界面调用,不是单一脚本演示。
• 模型对比清晰:同时实现 YOLOv8 与 Faster R-CNN,能够展示不同检测框架在红外行人任务中的差异。
• 检测效果直观:提供混淆矩阵、PR 曲线、F1 曲线、训练曲线和检测效果图,适合答辩或项目汇报。
• 界面功能完整:支持图片、视频、摄像头输入,能够显示目标数、类别、置信度、坐标和耗时信息。
• 具备报警思路:检测到行人后可触发声音提示,便于扩展为夜间通行提醒或无人值守监控系统。
• 扩展空间较大:后续可以继续接入目标跟踪、多摄像头管理、Web端展示、数据库存储和模型压缩部署。
9 项目适用方向
这个项目比较适合作为人工智能、计算机视觉、软件工程、物联网感知、智能安防等方向的课程设计或毕业设计参考。它既有算法训练内容,也有系统界面展示内容,能够覆盖"模型怎么来、结果怎么看、系统怎么用"这几个关键问题。
• 计算机视觉课程设计:适合展示目标检测、红外图像处理和模型评估流程。
• 人工智能毕业设计:适合围绕 YOLO、Faster R-CNN、深度学习检测系统展开。
• 软件工程综合实训:可以重点展示 PyQt5界面、模块化调用、日志管理和用户交互。
• 智慧安防项目展示:可扩展为夜间行人检测、园区监控、通道预警等场景原型。
• 算法模型应用实践:适合学习数据标注、模型训练、指标分析和检测结果可视化。
每文一语
真正有价值的项目,不只是在代码里跑通一次,而是能把数据、模型和应用场景连成一个完整闭环。