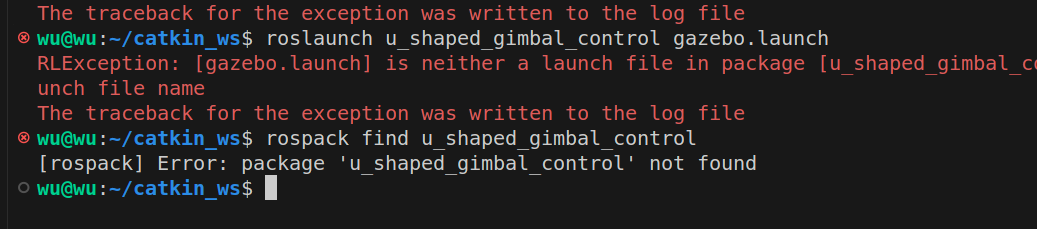
如题,你在bashrc中写了source xxx.bash,但是你打开新的终端后,提示报错,并且找不到这个package
 即使你在bashrc中写了
即使你在bashrc中写了
不知道原因之前,总是觉得怪怪的,知道原因后,其实很简单。
这里其实就是ROS工作空间source的核心机制 ------每个工作空间的setup.bash不是简单"追加"路径,而是基于该工作空间编译时的依赖关系,重新构建ROS_PACKAGE_PATH。
一、核心机制
每个ROS工作空间编译(catkin_make/catkin build)时,会在devel/setup.bash中记录:
- 该工作空间编译时,生效的「父工作空间」(也就是当时
ROS_PACKAGE_PATH里的路径); - 当你
source这个setup.bash时,ROS会:- 把当前工作空间的路径放到最前面(最高优先级);
- 然后拼接上编译时记录的「父工作空间」路径;
- 最后只保留系统ROS路径(
/opt/ros/noetic/share); - 不会保留之前手动
source过的、但和当前工作空间无关的路径。
简单说:source一个工作空间的setup.bash,相当于"重置"ROS_PACKAGE_PATH,只保留「当前工作空间 + 它编译时依赖的工作空间 + 系统ROS」。
二、我这边做了测试
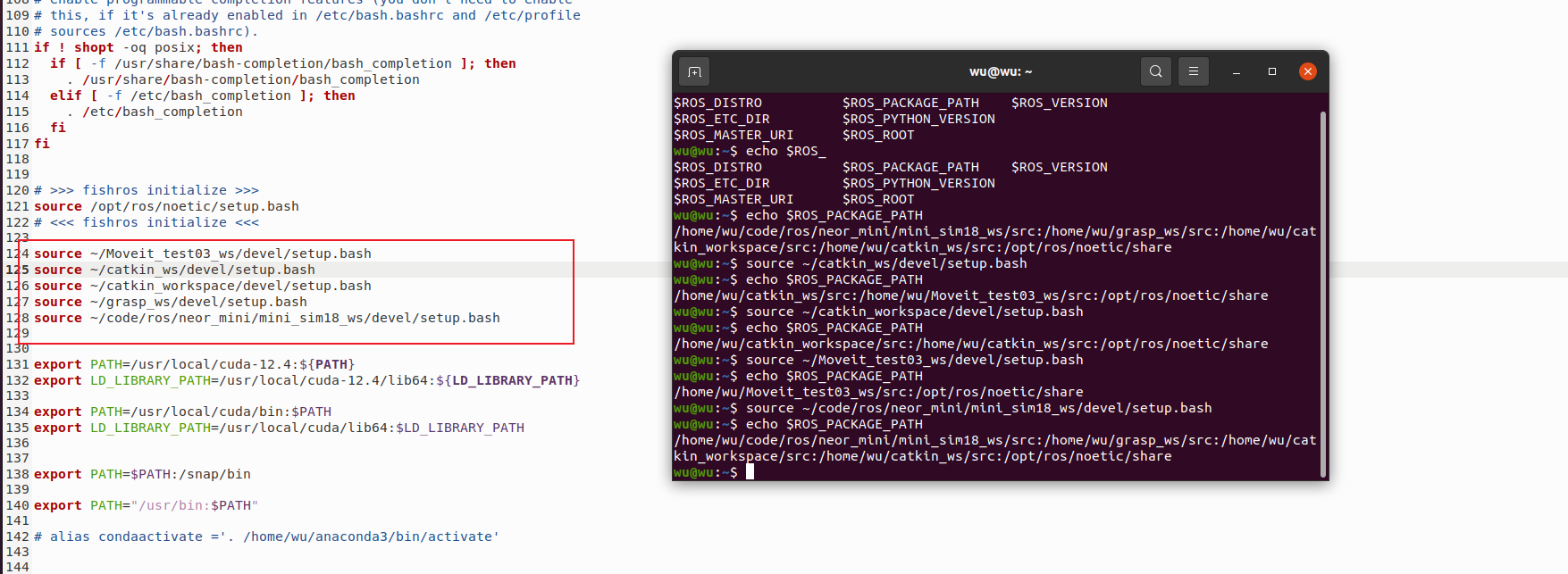
1. 初始状态(.bashrc加载后的默认值)
bash
echo $ROS_PACKAGE_PATH
/home/wu/code/ros/neor_mini/mini_sim18_ws/src:/home/wu/grasp_ws/src:/home/wu/catkin_workspace/src:/home/wu/catkin_ws/src:/opt/ros/noetic/share- 原因:
.bashrc里最后source的是mini_sim18_ws,且mini_sim18_ws编译时依赖了grasp_ws、catkin_workspace、catkin_ws,所以初始路径包含这些。
2. source catkin_ws后
bash
echo $ROS_PACKAGE_PATH
/home/wu/catkin_ws/src:/home/wu/Moveit_test03_ws/src:/opt/ros/noetic/share- 原因:
catkin_ws编译时只依赖Moveit_test03_ws和系统ROS,所以source它时,ROS会"重置"路径,只保留catkin_ws(当前) +Moveit_test03_ws(父) + 系统ROS,删掉了mini_sim18_ws、grasp_ws等无关路径。
3. source catkin_workspace后
bash
echo $ROS_PACKAGE_PATH
/home/wu/catkin_workspace/src:/home/wu/catkin_ws/src:/opt/ros/noetic/share- 原因:
catkin_workspace编译时依赖catkin_ws和系统ROS,所以source后路径变成:catkin_workspace(当前) +catkin_ws(父) + 系统ROS,删掉了Moveit_test03_ws。
4. source Moveit_test03_ws后
bash
echo $ROS_PACKAGE_PATH
/home/wu/Moveit_test03_ws/src:/opt/ros/noetic/share- 原因:
Moveit_test03_ws编译时没有依赖任何自定义工作空间 ,只依赖系统ROS,所以source后路径只有它自己 + 系统ROS,其他自定义工作空间路径全被删掉。
5. source mini_sim18_ws后
bash
echo $ROS_PACKAGE_PATH
/home/wu/code/ros/neor_mini/mini_sim18_ws/src:/home/wu/grasp_ws/src:/home/wu/catkin_workspace/src:/home/wu/catkin_ws/src:/opt/ros/noetic/share- 原因:回到初始状态,因为
mini_sim18_ws编译时依赖了grasp_ws、catkin_workspace、catkin_ws,所以source后这些路径又被加回来。
每个ROS工作空间的setup.bash就像一个"预设清单":
- 编译时:你告诉它"我依赖A、B、C工作空间",它就把A、B、C记到清单里;
source时:它会清空当前所有路径,只按清单加载"自己 + 依赖的A/B/C + 系统ROS"。- 不同工作空间的"清单"不同,所以
source后ROS_PACKAGE_PATH就不一样。
总结
- 核心原因 :
source工作空间的setup.bash会"重置"ROS_PACKAGE_PATH,只保留「当前工作空间 + 它编译时依赖的工作空间 + 系统ROS」,而非简单追加; - 关键现象 :不同工作空间编译时的依赖不同,导致
source后路径组成不同;
最后
这就是我最开始存在的困惑:为啥我bashrc中source路径放置的顺序不同,最后有些能直接跑起来,有些就是需要重新source指定bash。