《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
从灵长类动物进化到直立行走以来,双手被解放出来得以参与高度复杂的控制任务。在人类工作场景中,大量体力劳动都涉及需要双手高度同步协作的动作(同步条件),,比如搬运重物。在皮划艇运动中,需要运动员自身双手的同步配合,以及不同运动员之间双手动作的协同一致,任何一方(任何一只手)的不协调都可能影响艇的速度和方向。而在一些情况下,双手需要发挥更细化的作用和分工(不同步条件),例如开瓶时一只手开瓶,另一只手扶住瓶身;端托盘时一只手端托盘,另一只手拿杯子。
一.限制:动作偏好
在双手协调运动中,会出现一些天生的、自发的默认模式或动作偏好,这些动作偏好是双手协调的限制。其中,双手的时间匹配和空间匹配是是双手协调中最基本的倾向。
1.时间因素
双手相位差是指手部动作的节奏协调,如图1。双手的两根手指同时向内或向外摆动时,相位差为0°(同相位模式),两根手指平行摆动时相位差为180°(反相位模式),而90度处于两种运动模式之间;还如双手拍桌子的例子,当双手同时拍桌子及同时抬起时,双手相位差为0°。而一个手拍桌子另外一个手抬起时,双手相位差为180°。研究显示,当双手协调模式为同相位模式时,双手协调动作的稳定性最高;反相位模式时稳定性比同相位模式稍差。其他相位差(如90°、135°等)的稳定性更差,它们在未经训练的情况下很难保持稳定。例如,以较低的速度作出反相位模式的动作时(如两只手指不断平行摆动),动作能得到较好的维持,但是当速度加快时反相模式会不自觉的转变为同相模式,其他相位差如90 度或 135°的就更容易变为同相模式了。(Lee,Swinnen和Verschueren,1995)
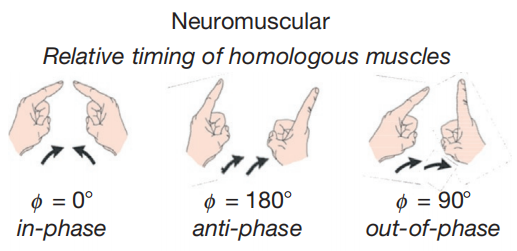
图1
在动作频率方面,当双手频率相同时稳定性高,反之如果双手频率差异越大,则稳定性越低。对于不熟练的表演者,当提高演奏速度时,可以观察到频率向更简单比例的回归(例如从5:3 回退到2:1)(Peper,Beek和Van Wieringen,1995 年)。另外,当双手频率的关系为整数倍(如1:2)时,其动作比双手频率关系为非整数倍(如3:5)时更稳定(Summers,Rosenbaum,Burns和Ford,1993)。
2.空间因素
运动幅度和方向等空间编码的限制也会影响复杂的双臂运动。在空间因素上,在同时用双臂/双手进行不同幅度的运动时,运动幅度会相互趋近(Sherwood,1994 年)。在同时进行不同方向的运动时,也产生了类似的现象,可以观察到双臂/双手向同方向发展(Swinnen,Dounskaia,Levin和Duysens,2001)。
当同时绘制不同方向的线条时,这种现象很容易被体验到(无法同时绘制不同方向的线条),同时也能观察到顶叶-额叶通路的激活增强,且增加强度与方向不兼容的程度成正比,这表明大脑正在努力协调。另外,即使只是想象这种动作,方向干扰效应也会出现,这表明干扰不仅出现在动作执行阶段,还出现在动作规划阶段(Garbarini,D'Agata,Piedimonte和Sacco等,2013)。
3.生理因素
时间因素和空间因素只是双手动作偏好的一种外在表现。有研究认为,根据不同肌肉分组的激活情况(如14-4:协同理论),可以解释双手相位差所造成的稳定性降低。如相位差为0°的双手动作往往是同源肌肉的同时激活,而相位差为180°或其他一些情况的往往是非同源肌肉的同时激活。(Serrien和Swinnen,1997)
影响双手协调的因素有很多,当一种双手协调模式所满足的条件越多,它就越稳定。比如,某个双手动作是同相位的、同频率的,那么就比同相位不同频率的或同频率不同相位的双手动作更稳定(邢佑川和张智君,2011)。
二.克服协调的限制
尽管影响双手协调的因素繁杂,但人们总能克服干扰,顺利完成双手协调任务。比如开车时,右手换挡、左手把控方向盘,需高度配合;系鞋带时,双手一静一动,默契打结;而左手抓钢笔,右手开抽屉也需协调。要实现这样的协调,有时候需投入大量时间精力,反复练习,让肌肉形成记忆,让大脑在双手间建立高效的神经传导通路。在练习的过程中,注意、身体感觉和胼胝体等起到重要作用。有时候,可以利用一定的策略来克服双手的干扰。如使用合适的知觉刺激和任务概念化。
1.胼胝体(原洪吉,2008)
在双手协调运动中,只有在胼胝体的密切参与下才能够实现。胼胝体连接左右脑的运动前区和运动区,保证两半球能进行大量的信息沟通,从而共同控制双手达到协同的状态。有研究显示,裂脑患者在协调和学习双手运动模式方面存在困难,但这些患者在同时做出双手完全不同的动作时遇到的困难却比正常人少得多(每只孤立的手的运动程序被保存下来且互不干扰)(14-5:运动控制的生态学理论)。
2.注意(原洪吉,2008)
手的随意运动与注意是不可分割的。注意具有选择性与集中性两个特点,注意的选择性是指将心理活动的资源朝向众多对象或信息中的一个。当双手同时进行操作时(尤其是不相似的复杂操作),左右手的操作信息会同时进入大脑,大脑势必会选取其一进行注意。也就是说,即在某个特定时间上,大脑一次只能只能控制一只手的运动。而在双手协调操作的状态时,很可能是由于大脑不断地将注意轮番在两只手间分配,且在瞬间内完成对单只手运动的调节和控制而迅速转向另外一只手。
注意资源是有限的,而且刺激或加工任务越复杂,占用的资源也越多。当认知资源完全被占用时,新的刺激将得不到进一步加工,也即未被注意(17-1:注意)。基于这一理论,当手进行操作时势必会占用注意资源,如果操作越复杂,则越需要注意力。当双手运动占用的注意资源不能满足时,大脑分配到手的注意力就会不足。这解释了日常生活中,双手能同时进行简单动作的现象,例如大脑在收到刺激信号后,双手同时握拳鼓掌等。而像一手画圆、一手画方的复杂动作,则不能同时完成,这很可能是因为注意资源不够,不能满足同时对右手和左手进行准确地、实时地调控。
3.身体感觉
研究表明,对目标双手协同操作时双手间存在有效的感知觉连接,来自一侧肢体的运动会对另一侧肢体的动力学产生影响。当感觉信息沿神经通路传入大脑后,左右脑半球依据各自功能分工,开始进行信息加工并通过胼胝体进行信息交流,依据对加工信息的判断再次通过神经通路向效应器发出运动指令。例如,左脑控制右手运动时,首先对左手及手臂的肌肉感受器的传入信息进行加工,分析肌肉的长度、张力及其变化;然后结合右脑对空间方位、距离、形象等信息(通过胼胝体传入)的加工结果,综合分析、推理和计划,例如计划前后动作的时空关系、动作的速度与力量等,并对右手发出运动指令。(原洪吉,2008)
4.知觉
研究者发现了一些知觉策略(如视觉)可以减少双手协调时的限制,使双手协调动作更加稳定。Mechsner等(Mechsner,Kerzel,Knoblich和Prinz,2001)设置了不同条件下两个食指的摆动实验,包括手指方向(图2(a)和图(b))两种*手腕是否翻转(图(c)-图(d))四种,共8种实验条件。实验结果显示,不管手腕的翻转情况如何,双手对称动作(图a)的稳定性高于平行动作的(图b)。另外一个例子是,通常很难产生90度的异相手指敲击模式,但是如果被试将其与马蹄声联系起来时可能会找到窍门。因此Mechsner等人认为,双手动作的对称趋势不是肌肉和动作系统造成的,而纯粹是知觉的对称倾向在起作用。对于这种极端的结论,有不少其他研究者的反对意见,如Amazeen,DaSilva和Amazeen(2008)认为,视觉/空间因素和生理解剖因素在双手动态协调中存在交互作用。

图2
5.概念化
还有研究发现,使用任务概念化策略,使双手动作在空间上整合成一个单独的图形,可以减少双手干扰,提高双手协调的稳定性。Franz等人(Franz,Zelaznik,Swinnen,Walter,2001)让被试在空中用双手同时画半圆,一只手在上方画上半圆或下半圆,另外一只手在下方同样画上半圆或下半圆,共四种组合,如图3。结果发现,如果上下两个半圆可组成一个完整的圆时(图(c)),任务很容易完成;而如果上下两个半圆的弧顶对弧顶(图(d)),则任务变得非常困难。该结果支持概念化加工对动作协调的作用。这些不同组合的区别在于所形成的表征不同,对不同的表征其熟悉度不同(一个是人们常见的圆形,另一个则很难让人想到什么),从而造成成绩的差异。
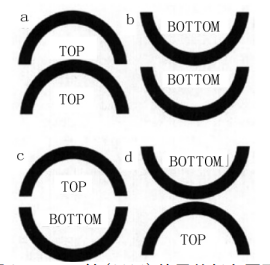
图3
三.模型(Cardoso de Oliveira,2002)
1.一般运动程序
一般运动程序基于这样一个假设,即运动在中枢神经系统中由运动程序及其相关参数来表示。该理论认为,运动程序在运动开始执行之前就规定了整个动作的"形态"。为了实现具体的动作,必须明确运动程序的参数(例如力量或时间参数)。研究人员(Schmidt,Zelaznik,Hawkins和Frank等人,1979)提出,这一概念同样适用于双臂动作,即一个一般运动程序可以控制双臂的协调动作。这一概念的主要优势在于,仅指定运动程序的参数,可使独立控制的自由度数量减少,从而使系统运行更高效。另外,通过改变肢体运动参数,就能得到该运动的一些变异,使运动控制更灵活。例如,图4中的F(t)是一个一般运动程序,通过设置时间缩放b和幅度缩放a,可以得到具体的手部动作H(t)。相关的行为研究表明,时间方面由更高级的中枢制定,即时间参数由两只手共享(两只手的时间参数相同),而力参数则由不同的手部进行特异性编码(不同手的力量参数不同)。
那一般运动程序它又是从何而来的?长期以来一直有将特定功能分配给不同脑区的传统,这一观点在早期的双侧手协调研究中也占据主导地位。尽管辅助运动区(SMA)传统上一直被认为与双侧手运动有独特关联,但关于动作观察的fMRI研究却未能证实SMA或任何其他脑区是双侧手协调的专属控制中心。相反,将这一复杂功能分配给一个脑区网络而非单一区域可能会更适合。而对非人灵长类动物的单细胞记录技术表明,运动区(SMA和初级运动皮层)中有一部分神经元在双侧肢体运动产生时会被独特激活(Donchin 等人,1998 年)。这表明在没有专门脑区的情况下,与双侧肢体运动相关的某些神经元具有一定程度的特异性。
另外,根据不同因素,包括内部因素(专业水平、年龄和病理状况)和外部因素(环境信息以及任务的难度和复杂性),激活可能会扩展到(前)额叶、顶枕叶、颞叶以及岛叶皮质等脑区。例如,就外部因素而言,可通过提高运动速度或频率来增加任务难度。提高频率主要会导致运动区(辅助运动区、前运动区和初级运动皮层)以及皮质下结构的激活调节。除此之外,同相和反相双侧手部模式的比较表明,在较低的频率(最高1赫兹)时,辅助运动区的脑激活增加,并延伸至扣带回运动皮层,而在较高频率(> 1赫兹)时,前运动区、初级运动皮层和小脑也会出现额外的激活,偶尔还会在布罗卡区;就内部因素而言,与年轻人相比,老年人在执行同相和反相任务时,大脑顶叶-额叶通路的激活增强,尤其是额叶区域的激活显著增加。总之,双手协调网络是一个高度动态的实体,会随着各种内部和外部因素的变化而变化。(Swinnen和Gooijers,2015)
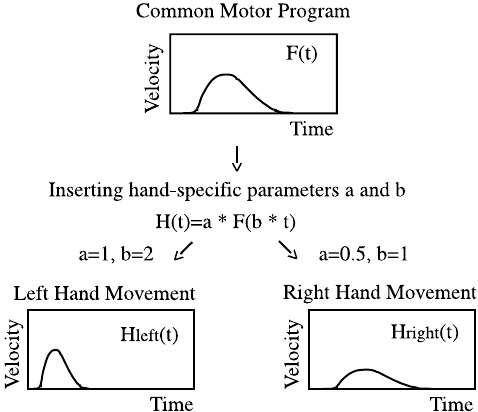
图4
尽管一般运动程模型能够解释一些观察(双手的高度协调),但它并不能完全解释所有的行为现象。例如,一些研究发现两只手的时间参数并非完全相关,即时间编码并非完全相同,两只手的距离误差也并非完全独立。
2.双手交互模型
(1)模型介绍
如图5,与一般运动程序模型不同,双手交互模型认为存在两个独立的运动计划,每只手各一个(Marteniuk 和 MacKenzie,1980 年)。双手运动之间的相互作用(限制或默认模式)被认为是由控制双手的信号在多个(至少两个)层面的部分混合(交互作用)所导致的。
在最底层,这种交互作用推测发生在运动参数指定之后(在执行层面),具体的神经组织部位可能是皮质脊髓束。大多数皮质脊髓纤维在锥体交叉处交叉到对侧(如图中粗线),形成外侧皮质脊髓束,而约10%的皮质脊髓纤维没有发生交叉(如图中细线),并沿内侧皮质脊髓束下行。这种排列方式表明,尽管每只手主要由对侧大脑半球控制,但也有同侧的影响(例如对两侧通路进行平均,如图中标有"Avg"的圆圈所示)。这种影响的结果是,每只手臂执行的动作会略微类似于对侧手臂的动作,从而导致动作的同化(例如两只手倾向于同相或同频率)。
在更高层次上也可能存在交叉的影响,且认为存在于参数指定的层面上(如图中的双头箭头所示)(Heuer,Kleinsorge,Spijkers和Steglich,2001 年)。一般认为,指定运动参数的部位在运动皮质,而胼胝体可以连接两侧大脑半球之间的相互作用。人类明显具备克服双臂之间动作偏好的能力并且双手之间的协调具有任务依赖性(如根据任务学习双手协调,如系鞋带或演奏乐器)和可塑性,因此双手协调的强度能以某种方式加以改变。在不同任务中,胼胝体的动态相互作用使不同程序之间实现灵活的耦合(形成协调)和解耦,如在同相的拍桌任务中,对双手同步运动中进行耦合,而对异步运动解耦;相反,在反相的拍桌任务中,对异步双手运动进行耦合,而对同步运动解偶。
总的来说,与执行相关的交互(低层次)可能是静态的(固定不变的),而参数交互(高层次)则可能具有动态的灵活的交互作用,这可以解释通过练习可以调节双手之间的耦合现象。
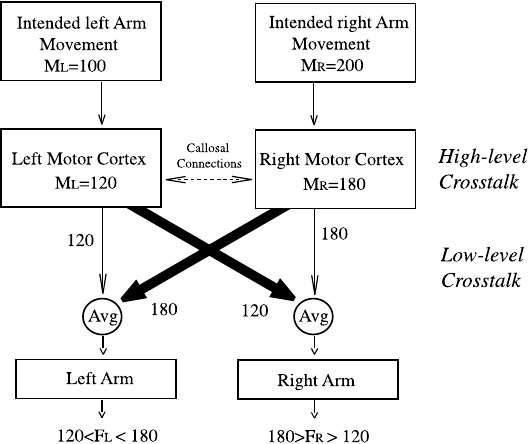
图5
(2)与一般运动程序的关系
从通常一般运动程序和交互模型的介绍方式来看,人们可能会认为这两种模型是相互排斥的。然而,事实未必如此。这两种模型关注的是运动控制的不同层面。一般运动程序更侧重于选择运动类型这一高级认知过程,而交互模型则更强调所选运动类型的参数化过程以及运动指令向下传递的过程。单独来看,这两种模型都无法解释所有的行为现象。交互模型无法解释某些运动的耦合关系(如在非常熟悉的双手协调运动中,它可能仅由一个运动程序控制),而且由于交互模型必须分别指定两个独立的运动计划,它需要的自由度数量更多。另一方面,一般运动程序模型也无法解释双臂运动之间的交互作用(限制或默认模式)。如果将一般运动程序和交叉模型结合起来,将可以克服这些局限性。在这种组合模型中,一般运动程序可以在比双手交互模型更高的层次上创建。而双手交互模型中的两个独立的运动计划就可以被解释为一般运动程序的低一层级,即一般运动程序的手部特异性的实现。
在极端情况下,高层次的交互作用在功能上可能与一般运动程序非常相似。强烈的高层次交互作用可能会使两个运动计划彼此融合,以至于可以将其解释为一个一般运动程序的变体。在这种情况下,就不需要单独表示一般运动程序。而当高层次交互作用较弱时,可能存在两个相对独立但有微弱交互作用的运动计划。
3.协同理论(14-4:协同理论)
一般运动程序并非唯一提出"多组织(肢体或肌肉)运动受共同控制机制支配"的理论,协同理论也具有这一特点。在协同理论这一框架中,"协调结构"(如肌肉协同结构矩阵和肌肉激活系数矩阵)可以使不同肌肉集中在一起受控于同一协同模块。与一般运动程序类似,协调结构通过减少自由度数量来提高编码效率,并且也被用来解释双臂运动同步的趋势(如双手的同源肌肉)。