Part II 7-8
-
- [7. 统一几何处理视角](#7. 统一几何处理视角)
-
- [7.1 从"方法并列"到"约束分层":为什么必须建立统一几何处理视角](#7.1 从“方法并列”到“约束分层”:为什么必须建立统一几何处理视角)
- [7.2 一个统一目标:从渲染一致到拓扑合法的四层约束分解](#7.2 一个统一目标:从渲染一致到拓扑合法的四层约束分解)
- [7.3 第一层:渲染一致性 L render \mathcal{L}{\text{render}} Lrender ------ 观测可解释,但天然存在核空间](#7.3 第一层:渲染一致性 L render \mathcal{L}{\text{render}} Lrender —— 观测可解释,但天然存在核空间)
- [7.4 第二层:几何一致性 L geom \mathcal{L}{\text{geom}} Lgeom ------ 从"像"到"有曲面微分结构"](#7.4 第二层:几何一致性 L geom \mathcal{L}{\text{geom}} Lgeom —— 从“像”到“有曲面微分结构”)
- [7.5 第三层:结构一致性 L struct \mathcal{L}{\text{struct}} Lstruct ------ 从连续几何到低维可解释结构元](#7.5 第三层:结构一致性 L struct \mathcal{L}{\text{struct}} Lstruct —— 从连续几何到低维可解释结构元)
- [7.6 第四层:拓扑合法性 L topo \mathcal{L}{\text{topo}} Ltopo ------ 结构存在,不代表关系合法](#7.6 第四层:拓扑合法性 L topo \mathcal{L}{\text{topo}} Ltopo —— 结构存在,不代表关系合法)
- [7.7 四层并非并列,而是条件数逐层恶化的依赖链](#7.7 四层并非并列,而是条件数逐层恶化的依赖链)
- [7.8 四类代表方法在统一能力地图中的定位](#7.8 四类代表方法在统一能力地图中的定位)
- [7.9 面向下一阶段的优化路线图:从"补约束"到"重构求解范式"](#7.9 面向下一阶段的优化路线图:从“补约束”到“重构求解范式”)
-
- [7.9.1 表示层优化:从单一表示转向双/三重表示耦合](#7.9.1 表示层优化:从单一表示转向双/三重表示耦合)
- [7.9.2 损失层优化:从单层误差转向层间一致性](#7.9.2 损失层优化:从单层误差转向层间一致性)
- [7.9.3 求解层优化:从纯梯度下降转向连续-离散混合求解](#7.9.3 求解层优化:从纯梯度下降转向连续-离散混合求解)
- [7.9.4 数据与评估层优化:从表面误差转向结构/拓扑指标](#7.9.4 数据与评估层优化:从表面误差转向结构/拓扑指标)
- [8. Part II 结语](#8. Part II 结语)
-
- [8.1 本 Part 真正完成的,不是"论文罗列",而是问题解剖](#8.1 本 Part 真正完成的,不是“论文罗列”,而是问题解剖)
- [8.2 最关键的结论:补几何与补结构元,都只是前奏](#8.2 最关键的结论:补几何与补结构元,都只是前奏)
- [8.3 3DGS 已经发生角色迁移:它正在从"画师"变成"几何中间层"](#8.3 3DGS 已经发生角色迁移:它正在从“画师”变成“几何中间层”)
- [8.4 BrepGaussian的拓扑装配与合法性修复](#8.4 BrepGaussian的拓扑装配与合法性修复)
- [8.5 面向后续研究的明确优化方向(本文综合建议)](#8.5 面向后续研究的明确优化方向(本文综合建议))
-
- [方向 A:双/三重表示协同,而非单表示一统天下](#方向 A:双/三重表示协同,而非单表示一统天下)
- [方向 B:在参数域而不是 3D 末端补 trim](#方向 B:在参数域而不是 3D 末端补 trim)
- [方向 C:把拓扑看作约束系统,而不是结果注释](#方向 C:把拓扑看作约束系统,而不是结果注释)
- [方向 D:评价体系升级](#方向 D:评价体系升级)
- [8.6 Part II 讨论了什么](#8.6 Part II 讨论了什么)
7. 统一几何处理视角
7.1 从"方法并列"到"约束分层":为什么必须建立统一几何处理视角
走到 Part II 这一位置,如果仍把 SurfaceSplat、Curve-Aware GS、GaussianCAD、Point2CAD 视为彼此独立的"方法条目",就仍然停留在论文综述层,而没有真正进入问题的数学内核。它们真正重要的,不是各自指标高低,而是分别触碰了 从可微统计表示走向工程几何对象 的不同层级:3DGS 解决的是可见性感知的高效显式渲染,SurfaceSplat 补的是全局曲面一致性,Curve-Aware Gaussian Splatting 把参数曲线变成主优化变量,GaussianCAD 把输入域推进到三视图工程草图,Point2CAD 则系统性暴露了从解析曲面到 B-rep 的重型逆向链路。
因此,本节的目标不是继续"介绍方法",而是完成一次问题坐标系变换。
在经典 NVS / 可微渲染叙事中,我们关心的是:
Given { I k , Π k } , find Θ such that R ( Θ ; Π k ) ≈ I k . (57) \text{Given } \{I_k,\Pi_k\},\ \text{find } \Theta \text{ such that } \mathcal{R}(\Theta;\Pi_k)\approx I_k. \tag{57} Given {Ik,Πk}, find Θ such that R(Θ;Πk)≈Ik.(57)
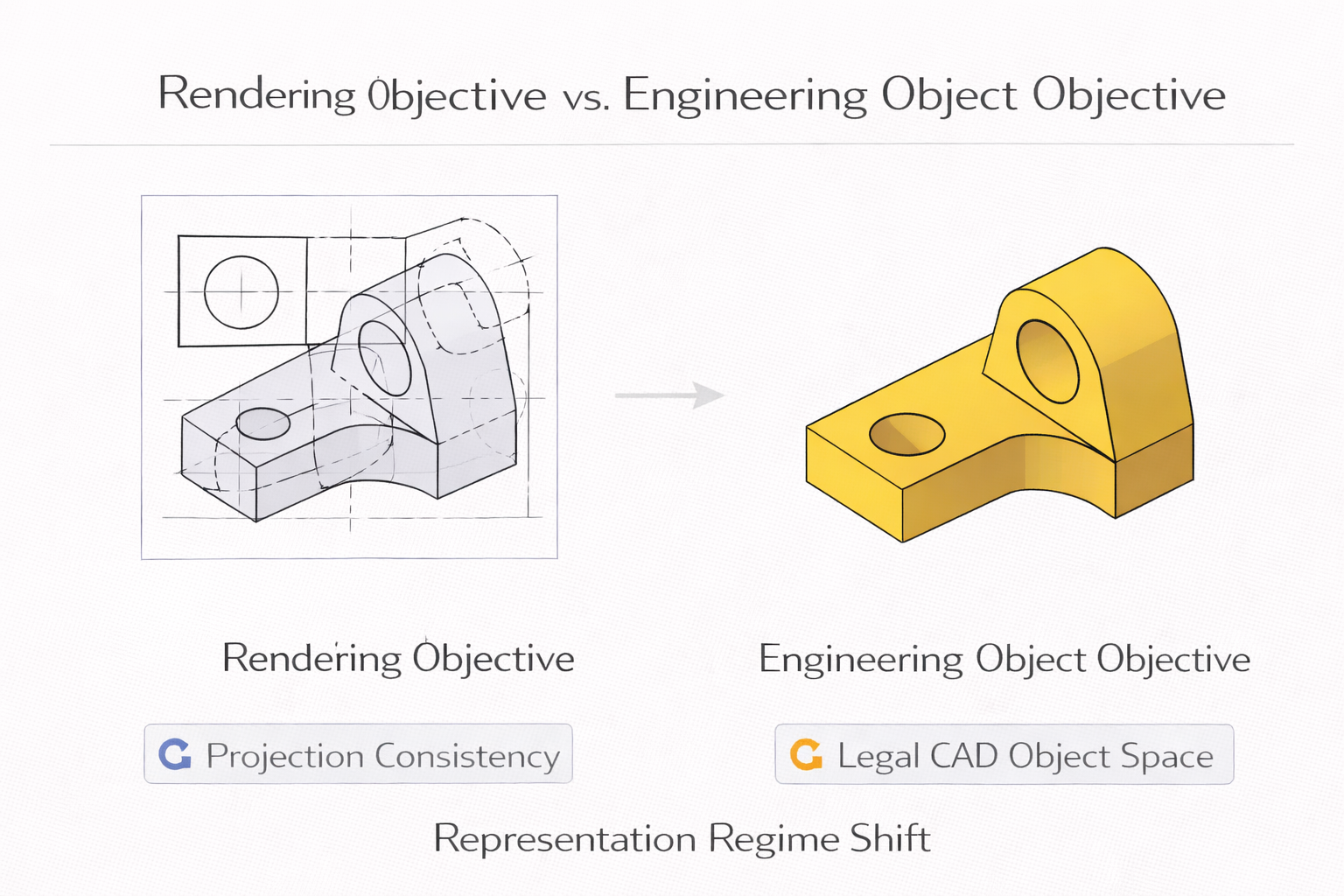
而在工程几何叙事中,我们关心的是:
Given { I k , Π k } , recover B ∈ C CAD such that Π ( B ) ≈ I . (58) \text{Given } \{I_k,\Pi_k\},\ \text{recover } \mathcal{B}\in \mathfrak{C}_{\text{CAD}} \text{ such that } \Pi(\mathcal{B})\approx I. \tag{58} Given {Ik,Πk}, recover B∈CCAD such that Π(B)≈I.(58)
其中 C CAD \mathfrak{C}_{\text{CAD}} CCAD 不是任意形状集合,而是满足参数化、裁切、邻接、流形性、边界合法性、交换标准兼容性的工程对象空间;OpenCascade 对 B-rep 的定义正是"geometry within topology ",即几何对象被拓扑数据结构绑定起来,OpenCascade Modeling Data 与 OpenCascade Topology Guide 都明确体现了这一点。
这两个问题看起来只差了一个 C CAD \mathfrak{C}_{\text{CAD}} CCAD,但本质上却是两个完全不同的优化问题:前者只要求"找到一个能解释观测的表示",后者要求"找到一个既能解释观测、又属于合法工程对象空间的表示"。前者的可行域巨大,后者的可行域则被强几何、强结构、强拓扑约束剧烈压缩。
如果借一个克制但准确的比喻:
前者更像"根据影子雕一个像样的石膏像",后者则更像"给出一份可被机械加工、几何内核、仿真器和装配系统同时接受的结构化蓝图"。石膏像只需要像,蓝图则需要合法。
7.2 一个统一目标:从渲染一致到拓扑合法的四层约束分解
将 Part II 涉及的几条路线放到统一框架下,可把整个问题抽象写成:
min Θ L render + λ g L geom + λ s L struct + λ t L topo . (59) \min_{\Theta}\ \mathcal{L}{\text{render}} +\lambda_g \mathcal{L}{\text{geom}} +\lambda_s \mathcal{L}{\text{struct}} +\lambda_t \mathcal{L}{\text{topo}}. \tag{59} Θmin Lrender+λgLgeom+λsLstruct+λtLtopo.(59)
其中 Θ \Theta Θ 可以同时包含:
- 可微显式表示参数:如 Gaussian centers、covariances、opacity、radiance / SH;
- 连续场参数:如 SDF / occupancy / neural field;
- 结构元参数:如曲线控制点、primitive 参数、patch 参数、节点向量;
- 拓扑变量:如 incidence、adjacency、trim loops、cell complex、face-edge-vertex graph。
意义是:工程语义恢复不是单一欧氏空间中的普通最优化,而是横跨了 观测空间、嵌入几何空间、低维结构元空间、离散组合空间 的混合问题。这四类损失分别作用在四种不同对象空间上:
- L render \mathcal{L}_{\text{render}} Lrender 约束 观测一致性;
- L geom \mathcal{L}_{\text{geom}} Lgeom 约束 连续几何的一阶/二阶微分结构;
- L struct \mathcal{L}_{\text{struct}} Lstruct 约束 低维可解释结构元;
- L topo \mathcal{L}_{\text{topo}} Ltopo 约束 离散连接关系与合法性。
也就是说,这不是"同一个对象的四个视角",而是"同一个问题被投影到四种不同数学语言中的四个子问题"。很多系统之所以在前半段表现优秀、后半段突然崩塌,不是因为某一项 loss 没调好,而是因为它试图用低层语言替代高层对象。比如:
- 想用渲染误差替代结构元语义;
- 想用平滑曲面替代 trim 合法性;
- 想用点云距离替代 B-rep 邻接一致性。
这些替代在数学上都不成立,因为它们根本不活在同一个对象空间里。
7.3 第一层:渲染一致性 L render \mathcal{L}_{\text{render}} Lrender ------ 观测可解释,但天然存在核空间
这一层约束模型必须在观测域上自洽,典型项包括:
- RGB / color residual;
- silhouette / mask residual;
- edge map residual;
- depth / normal rendering consistency;
- multi-view reprojection consistency。
更一般地,可写为:
L render = ∑ k = 1 K d ( R ( Θ ; Π k ) , I k ) . (60) \mathcal{L}{\text{render}}= \sum{k=1}^{K} d\!\left( \mathcal{R}(\Theta;\Pi_k), I_k \right). \tag{60} Lrender=k=1∑Kd(R(Θ;Πk),Ik).(60)
若进一步写成概率形式,则可理解为观测似然的负对数:
L render ∝ − ∑ k = 1 K log p ( I k ∣ Θ , Π k ) . (61) \mathcal{L}{\text{render}} \propto -\sum{k=1}^{K}\log p(I_k\mid \Theta,\Pi_k). \tag{61} Lrender∝−k=1∑Klogp(Ik∣Θ,Πk).(61)
3DGS 的重要贡献就在这一层:它以显式 3D Gaussian primitives 取代传统 NeRF 式的 ray marching 表示,并通过 visibility-aware rasterization、各向异性协方差优化和 interleaved density control,把可微渲染的计算主轴从体积分迁移到高效 splatting 上。这个迁移极其重要,因为它让"优化速度"和"显示显式几何中间态"同时成立。
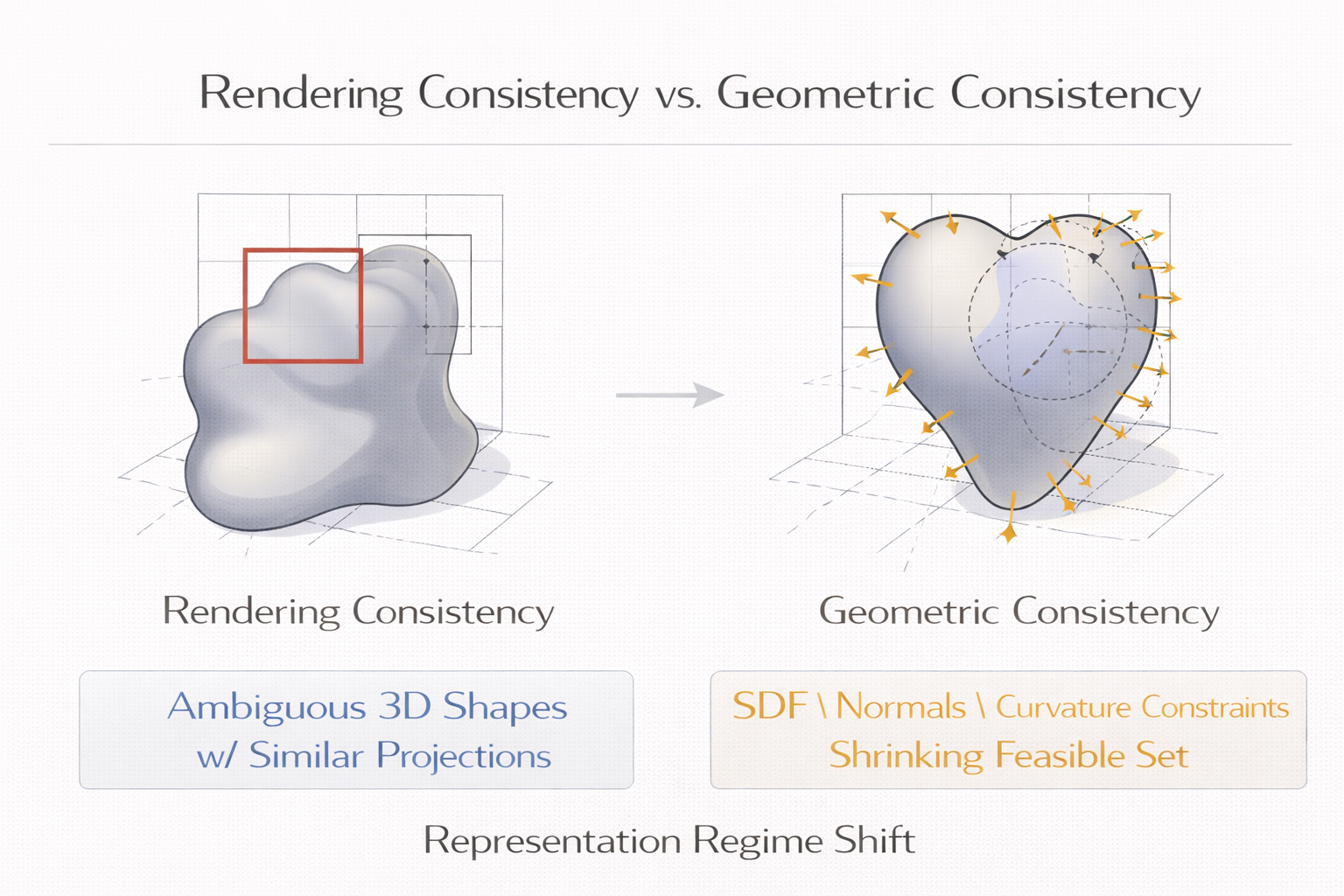
但这一层的数学极限同样必须说清楚:投影是降维算子,因而天然存在核空间。
设三维对象状态为 x ∈ X \mathbf{x}\in\mathcal{X} x∈X,观测为 y ∈ Y \mathbf{y}\in\mathcal{Y} y∈Y,投影/渲染算子记为 Π \Pi Π 或 R \mathcal{R} R,则局部线性化后有:
δ y = J Π ( x ) δ x , (62) \delta \mathbf{y} = J_{\Pi}(\mathbf{x})\,\delta \mathbf{x}, \tag{62} δy=JΠ(x)δx,(62)
其中 J Π J_{\Pi} JΠ 为雅可比矩阵。只要 dim X > dim Y \dim \mathcal{X} > \dim \mathcal{Y} dimX>dimY 或观测不充分,就会存在非零方向 δ x ≠ 0 \delta \mathbf{x}\neq 0 δx=0 满足:
J Π ( x ) δ x = 0. (63) J_{\Pi}(\mathbf{x})\,\delta \mathbf{x}=0. \tag{63} JΠ(x)δx=0.(63)
这意味着对象可以沿着某些方向发生变化,而观测几乎不变------这正是 inverse problem 的本质。
对于自然图像,多视角、纹理、阴影、遮挡等因素会在一定程度上削弱这种不适定性;但对于三视图正交草图,某些自由度反而更容易掉进投影核空间中,因为正交投影去掉了透视缩放这一强线索,GaussianCAD 之所以要借助 orthographic pose prior 和 visual hull 初始化,本质上就是在减少这种核空间的不良自由度。
因此, L render \mathcal{L}_{\text{render}} Lrender 能回答的是:"这个结果看起来像不像观测?"
但它回答不了:
- 它是否对应唯一几何;
- 它是否具有稳定法向和曲率;
- 它是否有可解释结构元;
- 它是否可进入工程拓扑对象空间。
如果借一个直观比喻:
L render \mathcal{L}_{\text{render}} Lrender 更像在看剪影------轮廓可能已经很像,但剪影并不告诉你关节怎么连、骨骼如何支撑、内部边界属于谁。
7.4 第二层:几何一致性 L geom \mathcal{L}_{\text{geom}} Lgeom ------ 从"像"到"有曲面微分结构"
这一层约束模型必须形成可解释、可微分、全局一致的几何对象。典型项包括:
- Eikonal regularization;
- normal consistency;
- curvature / fairness;
- local planarity / canonical surface residual;
- point-to-surface / surface-to-point distance;
- patch smoothness and compatibility。
对 SDF 而言,NeuS 与 VolSDF 是这一层的两条关键基线。NeuS 强调以 SDF 的 zero-level set 作为表面,并给出一阶无偏的体渲染表述;VolSDF 则把密度定义为 SDF 经 Laplace CDF 变换后的结果,从而让几何主导密度,而不是由密度反推几何。
典型几何项可写为:
L eik = E x ( ∥ ∇ f ( x ) ∥ − 1 ) 2 , (64) \mathcal{L}{\text{eik}}= \mathbb{E}{\mathbf{x}} \left( \|\nabla f(\mathbf{x})\|-1 \right)^2, \tag{64} Leik=Ex(∥∇f(x)∥−1)2,(64)
L surf = ∑ n = 1 N d i s t 2 ( x n , S ( u n , v n ) ) , (65) \mathcal{L}{\text{surf}}= \sum{n=1}^{N} \mathrm{dist}^2\!\left(\mathbf{x}_n, S(u_n,v_n)\right), \tag{65} Lsurf=n=1∑Ndist2(xn,S(un,vn)),(65)
L fair = ∫ Ω ( ∥ S u u ∥ 2 + 2 ∥ S u v ∥ 2 + ∥ S v v ∥ 2 ) d u d v . (66) \mathcal{L}{\text{fair}}= \int{\Omega} \left( \|S_{uu}\|^2+2\|S_{uv}\|^2+\|S_{vv}\|^2 \right)\,du\,dv. \tag{66} Lfair=∫Ω(∥Suu∥2+2∥Suv∥2+∥Svv∥2)dudv.(66)
几何一致性的本质是:恢复对象必须在局部具备稳定的一阶和二阶微分结构 。以参数曲面 S ( u , v ) S(u,v) S(u,v) 为例,其第一基本形式和第二基本形式分别为:
I = E F F G = ⟨ S u , S u ⟩ ⟨ S u , S v ⟩ ⟨ S u , S v ⟩ ⟨ S v , S v ⟩ , (67) I= \begin{bmatrix} E & F\\ F & G \end{bmatrix}= \begin{bmatrix} \langle S_u,S_u\rangle & \langle S_u,S_v\rangle\\ \langle S_u,S_v\rangle & \langle S_v,S_v\rangle \end{bmatrix}, \tag{67} I=EFFG=⟨Su,Su⟩⟨Su,Sv⟩⟨Su,Sv⟩⟨Sv,Sv⟩,(67)
I I = e f f g = ⟨ S u u , n ⟩ ⟨ S u v , n ⟩ ⟨ S u v , n ⟩ ⟨ S v v , n ⟩ . (68) II= \begin{bmatrix} e & f\\ f & g \end{bmatrix}= \begin{bmatrix} \langle S_{uu},\mathbf{n}\rangle & \langle S_{uv},\mathbf{n}\rangle\\ \langle S_{uv},\mathbf{n}\rangle & \langle S_{vv},\mathbf{n}\rangle \end{bmatrix}. \tag{68} II=effg=⟨Suu,n⟩⟨Suv,n⟩⟨Suv,n⟩⟨Svv,n⟩.(68)
由此可构造 shape operator、主曲率、平均曲率、高斯曲率。
也就是说,几何一致性不是"看起来像一张平滑表面"这么浅,而是要求:
- 法向场有意义;
- 曲率场可解释;
- 局部面元不退化;
- 曲面不会在微分意义上无约束漂移。
SurfaceSplat 的价值在这一层:它先用 SDF/mesh 给 3DGS 一个全局几何锚点,再通过 Gaussian 渲染回流细节监督。换言之,它先解决"有没有稳定骨架",再去追求"皮肤细节漂亮"。
优化方向,这一层值得推进的就不是再堆一个平滑项啥的,而是做 二阶几何感知优化:
-
曲率自适应权重
在高曲率区弱化过强 fairness,在低曲率区加强光顺约束,可写成:
L fair-adapt = ∫ Ω w ( κ 1 , κ 2 ) ( ∥ S u u ∥ 2 + 2 ∥ S u v ∥ 2 + ∥ S v v ∥ 2 ) d u d v . (69) \mathcal{L}{\text{fair-adapt}}= \int{\Omega} w(\kappa_1,\kappa_2) \left( \|S_{uu}\|^2+2\|S_{uv}\|^2+\|S_{vv}\|^2 \right)\,du\,dv. \tag{69} Lfair-adapt=∫Ωw(κ1,κ2)(∥Suu∥2+2∥Suv∥2+∥Svv∥2)dudv.(69) -
不确定性驱动的 Eikonal
对稀疏视角或弱监督区域,引入置信度 c ( x ) c(\mathbf{x}) c(x):
L eik-conf = E x c ( x ) ( ∥ ∇ f ( x ) ∥ − 1 ) 2 . (70) \mathcal{L}{\text{eik-conf}}= \mathbb{E}{\mathbf{x}} c(\mathbf{x}) \left( \|\nabla f(\mathbf{x})\|-1 \right)^2. \tag{70} Leik-conf=Exc(x)(∥∇f(x)∥−1)2.(70)这样可避免把不可靠区域硬性推成"伪距离场"。
-
SDF--Gaussian 双向一致性项
不只让 SDF 初始化 Gaussian,还让 Gaussian 的局部主方向反哺 SDF 的法向与局部曲率估计。
这比单向 initialization 更接近真正的双模态几何耦合。
7.5 第三层:结构一致性 L struct \mathcal{L}_{\text{struct}} Lstruct ------ 从连续几何到低维可解释结构元
这一层约束系统中的几何不再只是"连续表面"或"密度场",而是开始显式承认 结构元 的存在。典型结构元包括:
- 参数曲线;
- 参数曲面 patch;
- planes / cylinders / cones / spheres 等 canonical primitives;
- trim boundary candidates;
- curve network / wireframe;
- patch adjacency hints。
例如,对参数曲线 c ( t ) \mathbf{c}(t) c(t),可加入曲率平滑与稀疏项:
L curve = ∫ 0 1 ∥ c ′ ′ ( t ) ∥ 2 d t + β R sparsity ( P ) , (71) \mathcal{L}{\text{curve}}= \int_0^1 \|\mathbf{c}''(t)\|^2\,dt +\beta\,\mathcal{R}{\text{sparsity}}(\mathbf{P}), \tag{71} Lcurve=∫01∥c′′(t)∥2dt+βRsparsity(P),(71)
其中 P \mathbf{P} P 为控制点集。
对 patch coherence,可有:
L patch = ∑ k ∑ x n ∈ X k d i s t 2 ( x n , S k ( u n , v n ) ) + γ R compat ( { S k } ) . (72) \mathcal{L}{\text{patch}}= \sum{k}\sum_{\mathbf{x}_n\in\mathcal{X}_k} \mathrm{dist}^2\!\left(\mathbf{x}n,S_k(u_n,v_n)\right) +\gamma\,\mathcal{R}{\text{compat}}(\{S_k\}). \tag{72} Lpatch=k∑xn∈Xk∑dist2(xn,Sk(un,vn))+γRcompat({Sk}).(72)
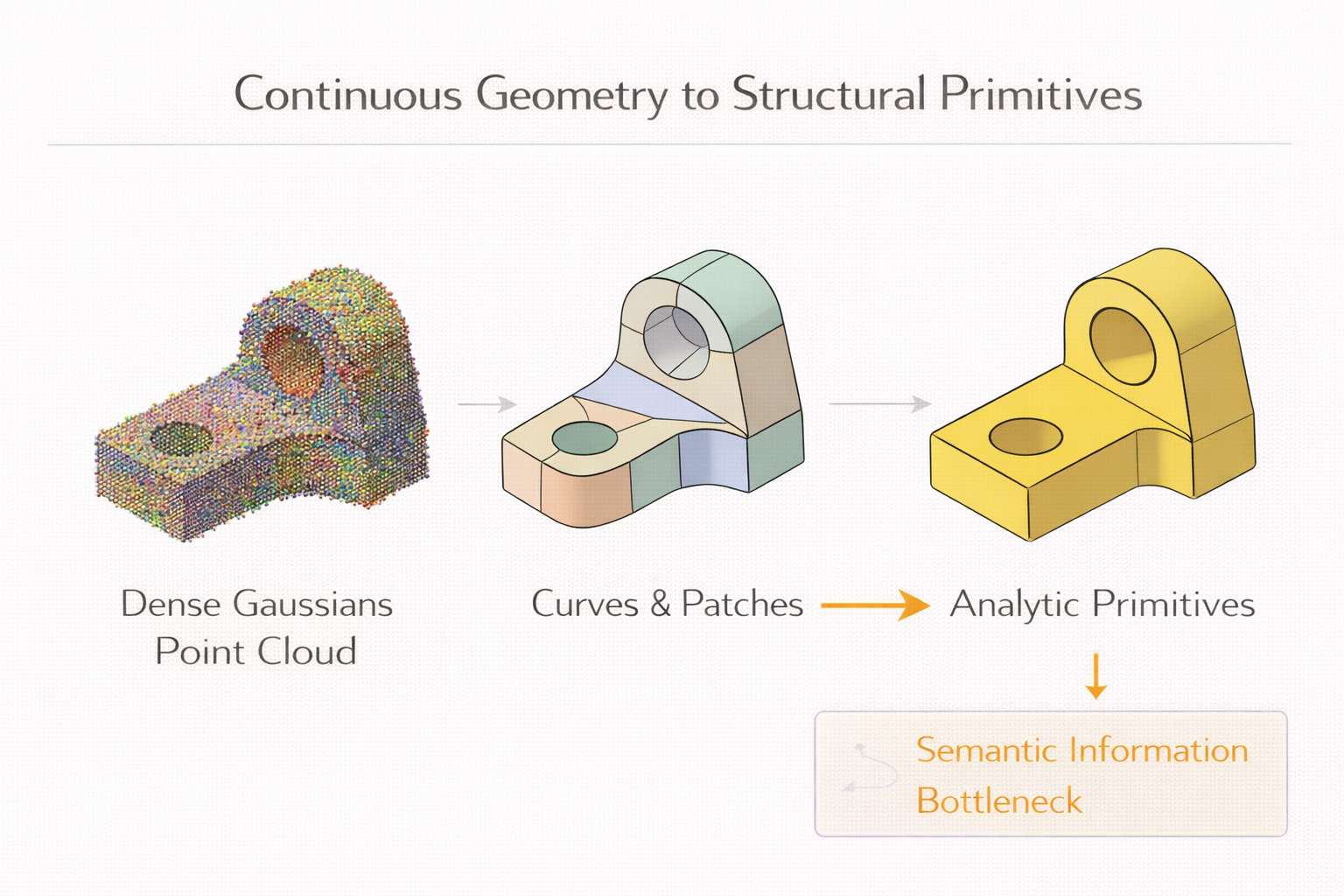
但结构层的底层算法要点,不在于"又多了几个参数对象",而在于:结构元把高维连续观测压缩成了低维但可解释的变量集合。
例如:
c ( t ) = ∑ i = 0 3 B i 3 ( t ) P i , (73) \mathbf{c}(t)=\sum_{i=0}^{3}B_i^3(t)\mathbf{P}_i, \tag{73} c(t)=i=0∑3Bi3(t)Pi,(73)
只需 4 个控制点就能描述一整个连续对象;而一条 edge point cloud 可能有几百上千个离散点。
因此, L struct \mathcal{L}_{\text{struct}} Lstruct 的作用,本质上是一个 semantics-aware information bottleneck:它不是单纯"简化模型",而是在迫使系统把自由度收缩到人类工程语义可命名的低维对象上。
Curve-Aware Gaussian Splatting 的革命性就在这里:它通过曲线参数到 edge-oriented Gaussian 的双向耦合,使得渲染梯度可以直接回流到曲线控制点。这意味着"边"不再是 edge cloud 后处理提取物,而是主变量。
如果把第 k k k 个高斯均值写为曲线采样点:
μ k = c ( t k ) , (74) \mu_k=\mathbf{c}(t_k), \tag{74} μk=c(tk),(74)
并用 Frenet / 局部正交标架来定义协方差方向,那么高斯就不再是自由粒子,而是曲线几何在渲染空间中的代理。
这一步的数学意义,是把 "点云拟合曲线" 的两阶段断裂,变成 "曲线参数直接进入可微渲染闭环" 的一阶段系统。
优化方向,这一层可以做做 分层结构路由与类型竞争:
-
Mixture-of-Primitives 路由机制
对局部区域同时假设 plane / quadric / spline patch / ruled surface 等候选模型,通过软分配或 EM 风格更新做类型选择:
L struct-mix = ∑ k π k L k + τ K L ( π ∥ π 0 ) . (75) \mathcal{L}{\text{struct-mix}}= \sum{k}\pi_k\,\mathcal{L}_k +\tau\,\mathrm{KL}(\pi\|\pi_0). \tag{75} Lstruct-mix=k∑πkLk+τKL(π∥π0).(75)这样系统可在"解析 primitive"与"freeform patch"之间自适应切换。
-
曲线--曲面联合一致性
让候选 edge 不只解释 2D edge map,还要满足其为相邻面交线或边界线:
L edge-face = ∑ e = ( i , j ) ∫ d i s t 2 ( c e ( t ) , S i ∩ S j ) d t . (76) \mathcal{L}{\text{edge-face}}= \sum{e=(i,j)} \int \mathrm{dist}^2\!\left(\mathbf{c}_e(t),\ S_i\cap S_j\right)\,dt. \tag{76} Ledge-face=e=(i,j)∑∫dist2(ce(t), Si∩Sj)dt.(76)这能把"视觉边"推进为"工程边"。
-
参数化先验嵌入
对曲面 patch 直接引入 chart regularization,避免结构元阶段才发现参数域崩坏。
这一步尤其重要,因为后续 trimmed NURBS 的成败,往往在结构层就已经注定。
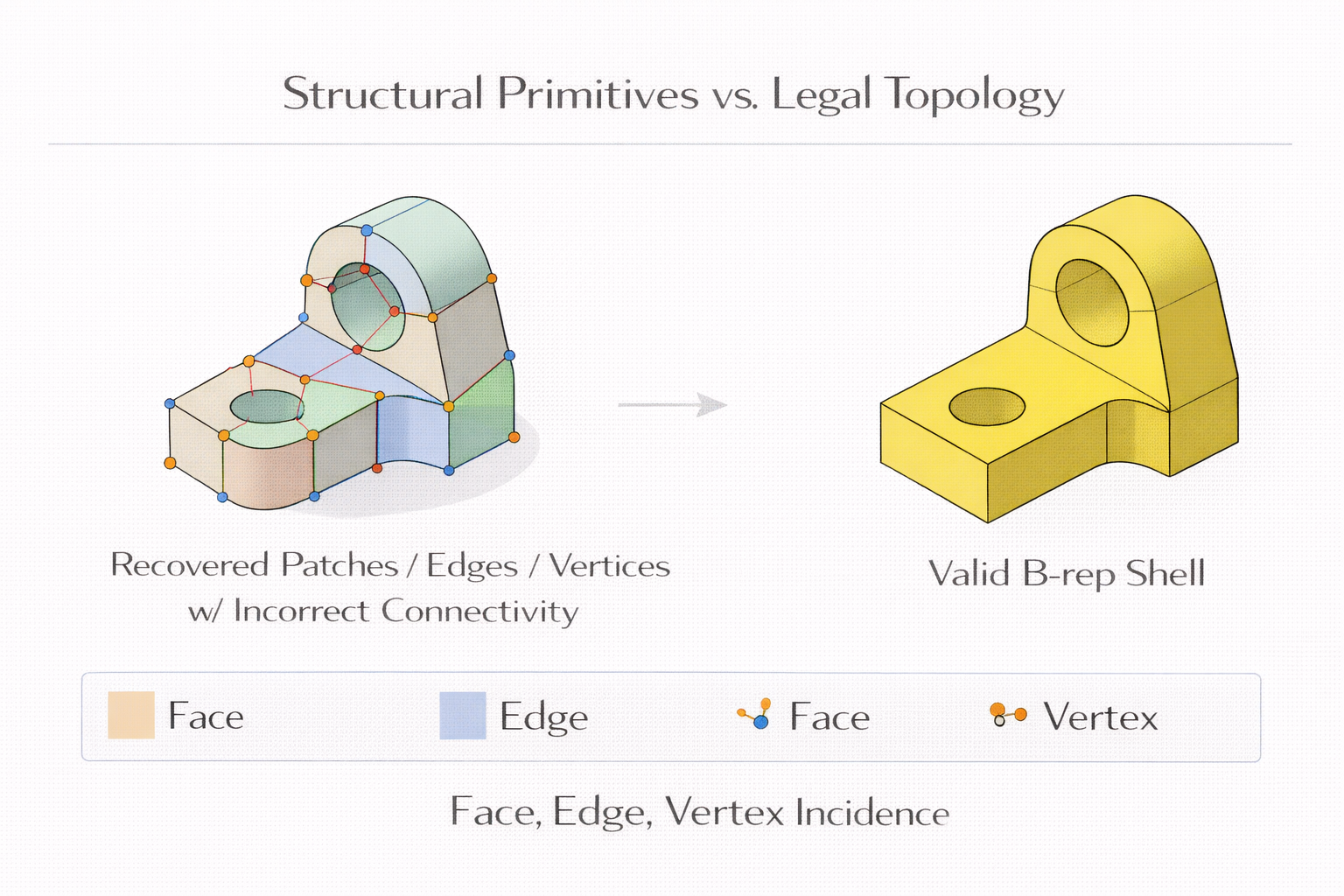
7.6 第四层:拓扑合法性 L topo \mathcal{L}_{\text{topo}} Ltopo ------ 结构存在,不代表关系合法
这一层约束系统最终输出必须满足工程几何资产真正关心的组合与合法性条件,包括:
- incidence consistency;
- adjacency correctness;
- trim loop closure;
- manifold / watertight / non-self-intersection constraints;
- face--edge--vertex compatibility;
- shell / solid validity;
- Hasse graph / cell complex legality。
设一个 B-rep 对象表示为:
B = ( V , E , F , I , A , T ) , (77) \mathcal{B}=(V,E,F,\mathcal{I},\mathcal{A},\mathcal{T}), \tag{77} B=(V,E,F,I,A,T),(77)
其中:
- V V V:顶点集合;
- E E E:边集合;
- F F F:面集合;
- I \mathcal{I} I:incidence;
- A \mathcal{A} A:adjacency;
- T \mathcal{T} T:trim 信息。
则拓扑合法性不是单个元素拟合得好不好,而是整个 tuple 是否落在合法集合:
L B-rep ⊂ P ( V ) × P ( E ) × P ( F ) × ⋯ (78) \mathfrak{L}_{\text{B-rep}} \subset \mathfrak{P}(V)\times \mathfrak{P}(E)\times \mathfrak{P}(F)\times \cdots \tag{78} LB-rep⊂P(V)×P(E)×P(F)×⋯(78)
中。
这意味着,拓扑层面对的问题已经不是"数值误差多大",而是"连接关系是否可能"。
例如,对 face-edge incidence matrix I F E \mathcal{I}{FE} IFE 与 edge-vertex incidence matrix I E V \mathcal{I}{EV} IEV,可抽象定义一致性项:
L inc = Φ ( I F E , I E V , A ) , (79) \mathcal{L}{\text{inc}}= \Phi(\mathcal{I}{FE},\mathcal{I}_{EV},\mathcal{A}), \tag{79} Linc=Φ(IFE,IEV,A),(79)
其中 Φ \Phi Φ 用于惩罚悬挂边、非法环、重复连接、孤立面等结构。
若 trim loop 为参数域中的闭合曲线 γ l \gamma_l γl,还必须满足:
γ l ( 0 ) = γ l ( 1 ) , S e l f I n t e r s e c t ( γ l ) = 0 , (80) \gamma_l(0)=\gamma_l(1), \qquad \mathrm{SelfIntersect}(\gamma_l)=0, \tag{80} γl(0)=γl(1),SelfIntersect(γl)=0,(80)
并正确处理其方向、嵌套关系与内外区域。
Point2CAD 的关键价值就在于:它完整展示了 surface fitting → extension → pairwise intersection → edge extraction → corner extraction → trimming → adjacency assembly 这条链。论文明确强调,由于 analytic surfaces 可被延展并相交,topology 才会"emerge"。 拓扑不是从渲染质量里自然长出来的,而是从几何对象之间的合法关系里长出来的。
更进一步地说,拓扑层的困难有两个根源:
-
离散性 :
某条边要么属于某个面,要么不属于,不存在"0.63 属于"这种最终语义。
-
全局耦合性 :
某一条边接错,往往会破坏整个 shell 的合法性,不是局部补丁能修好的。
如何往下做?可以考虑 连续松弛 + 离散修复的双阶段策略:
-
软邻接预测 + 图修复
前端预测软 incidence / adjacency 概率矩阵:
P F E ∈ 0 , 1 ∣ F ∣ × ∣ E ∣ , P E V ∈ 0 , 1 ∣ E ∣ × ∣ V ∣ , (81) P_{FE}\in0,1^{|F|\times|E|},\qquad P_{EV}\in0,1^{|E|\times|V|}, \tag{81} PFE∈0,1∣F∣×∣E∣,PEV∈0,1∣E∣×∣V∣,(81)后端再用 ILP / matching / graph repair 生成合法离散拓扑。
不要强求所有拓扑变量都在前端端到端完成。
-
Euler 特征与局部合法性联合约束
对封闭壳体可引入
χ = ∣ V ∣ − ∣ E ∣ + ∣ F ∣ , (82) \chi = |V|-|E|+|F|, \tag{82} χ=∣V∣−∣E∣+∣F∣,(82)配合"每条内部边被两个面共享"等局部规则,共同筛掉明显非法的候选解。
-
参数域中做 trim,而不是在 3D 中"贴边"
真正工业可交付的 trim 恢复,必须优先在 chart / uv 域中建模,再映射到 3D。这是后续 BrepGaussian 路线是否能真正进入工业语义层的关键分水岭。
7.7 四层并非并列,而是条件数逐层恶化的依赖链
最容易犯的错误,是把 L render \mathcal{L}{\text{render}} Lrender、 L geom \mathcal{L}{\text{geom}} Lgeom、 L struct \mathcal{L}{\text{struct}} Lstruct、 L topo \mathcal{L}{\text{topo}} Ltopo 看成四个可任意加权拼装的正则项。实际上,它们更接近一个 层层收缩可行域、且条件数逐层恶化 的依赖链:
L render ⇒ L geom ⇒ L struct ⇒ L topo . (83) \mathcal{L}{\text{render}} \Rightarrow \mathcal{L}{\text{geom}} \Rightarrow \mathcal{L}{\text{struct}} \Rightarrow \mathcal{L}{\text{topo}}. \tag{83} Lrender⇒Lgeom⇒Lstruct⇒Ltopo.(83)
更准确地说,这不是逻辑蕴含,而是工程上的"前一层是后一层的必要前置条件":
- 没有足够稳定的观测一致性,很难恢复可信几何;
- 没有稳定几何,结构元提取将极度脆弱;
- 没有结构元,拓扑装配就无从谈起。
从误差传播角度,可把系统视为复合映射:
B ^ = T ∘ S ∘ G ∘ R − 1 ( I ) , (84) \hat{\mathcal{B}}= \mathcal{T}\circ \mathcal{S}\circ \mathcal{G}\circ \mathcal{R}^{-1}(I), \tag{84} B^=T∘S∘G∘R−1(I),(84)
其中:
- R − 1 \mathcal{R}^{-1} R−1:从观测恢复中间可微表示;
- G \mathcal{G} G:从中间表示恢复连续几何;
- S \mathcal{S} S:从几何恢复结构元;
- T \mathcal{T} T:从结构元装配合法拓扑。
由于后续算子往往更非线性、更离散、更全局耦合,因此前层小误差常会在后层被放大。尤其一旦某条边被接错面,或某个 patch 被错分类型,系统往往直接跨入另一个组合分支,这不是局部微调能回来的"平滑误差",而是类似相变的结构错误。
最现实的求解策略不是"单次端到端做到底",而是 分层交替优化 + 层间反馈:
Θ G ( k + 1 ) ← arg min Θ G L render + λ g L geom , (85) \Theta_G^{(k+1)} \leftarrow \arg\min_{\Theta_G} \mathcal{L}{\text{render}}+\lambda_g \mathcal{L}{\text{geom}}, \tag{85} ΘG(k+1)←argΘGminLrender+λgLgeom,(85)
Θ S ( k + 1 ) ← arg min Θ S L geom + λ s L struct , (86) \Theta_S^{(k+1)} \leftarrow \arg\min_{\Theta_S} \mathcal{L}{\text{geom}}+\lambda_s \mathcal{L}{\text{struct}}, \tag{86} ΘS(k+1)←argΘSminLgeom+λsLstruct,(86)
Θ T ( k + 1 ) ← arg min Θ T L struct + λ t L topo . (87) \Theta_T^{(k+1)} \leftarrow \arg\min_{\Theta_T} \mathcal{L}{\text{struct}}+\lambda_t \mathcal{L}{\text{topo}}. \tag{87} ΘT(k+1)←argΘTminLstruct+λtLtopo.(87)
然后再把拓扑修复得到的结构约束,反向投给几何层和渲染层。
这比盲目坚持"一次性全可微端到端"更符合真实工程系统的数值性质。
7.8 四类代表方法在统一能力地图中的定位
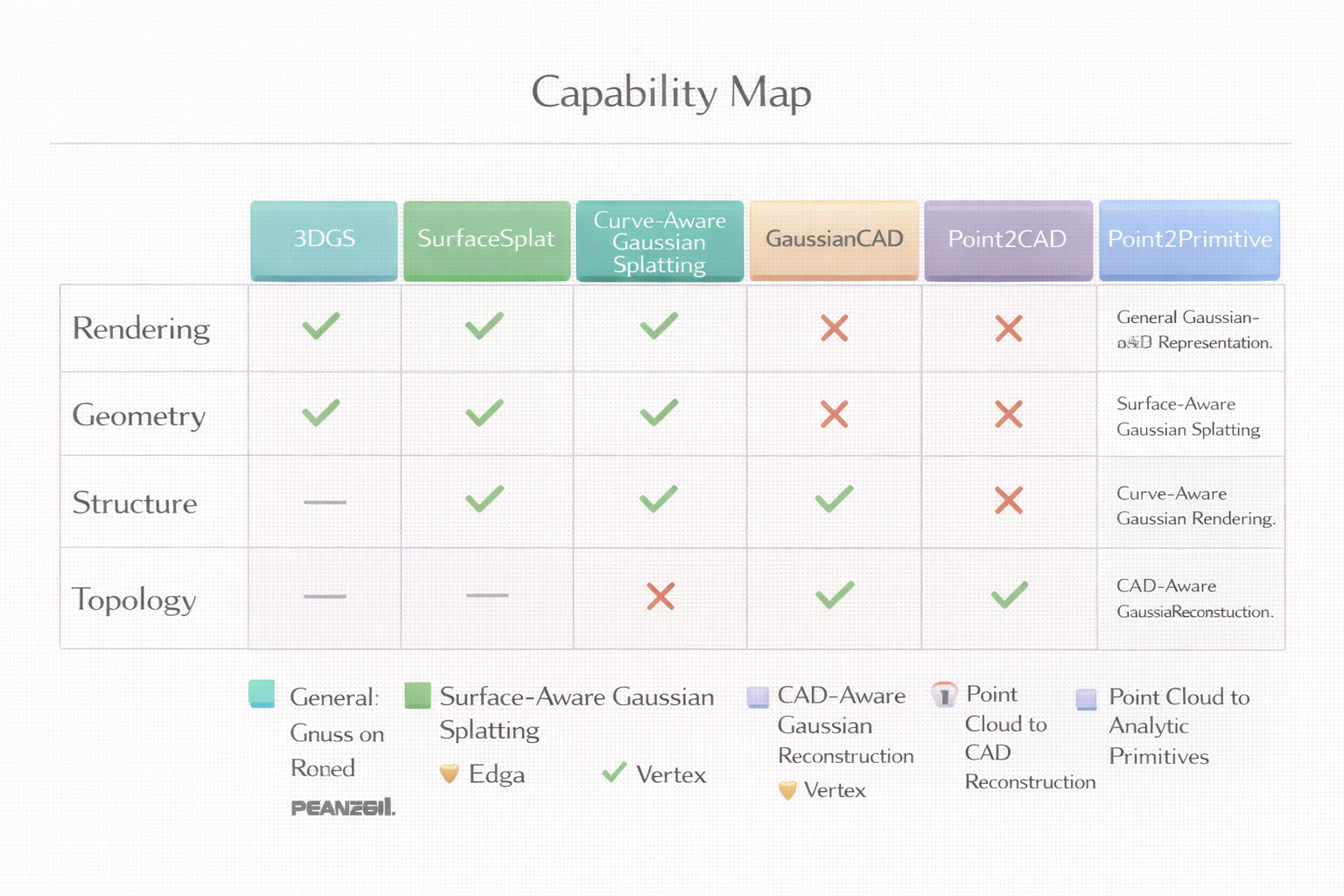
一旦采用式 ( 59 ) (59) (59) 的统一框架,就可以把本文涉及的路线放到一张真正有解释力的能力地图中:
- 3DGS:以高效显式可微渲染为核心,主要位于 L render \mathcal{L}_{\text{render}} Lrender;
- SurfaceSplat:通过 SDF / mesh 耦合显著补强 L geom \mathcal{L}_{\text{geom}} Lgeom;
- Curve-Aware Gaussian Splatting:将参数曲线变为主优化变量,显著补强 L struct \mathcal{L}_{\text{struct}} Lstruct;
- GaussianCAD:重写输入域与投影域,横跨 L render \mathcal{L}{\text{render}} Lrender 与 L geom \mathcal{L}{\text{geom}} Lgeom 的问题设定;
- Point2CAD:暴露从解析曲面到 B-rep 的硬约束链条,真正触碰 L topo \mathcal{L}_{\text{topo}} Ltopo;
- Point2Primitive 则提示了一条很重要的分支:对于以草图-拉伸为主的 CAD 类别,直接预测 extrusion primitives 可能比 generic freeform reverse engineering 更高效。
它们处在同一条能力上升链的不同层,不是替代关系,而是制度互补。
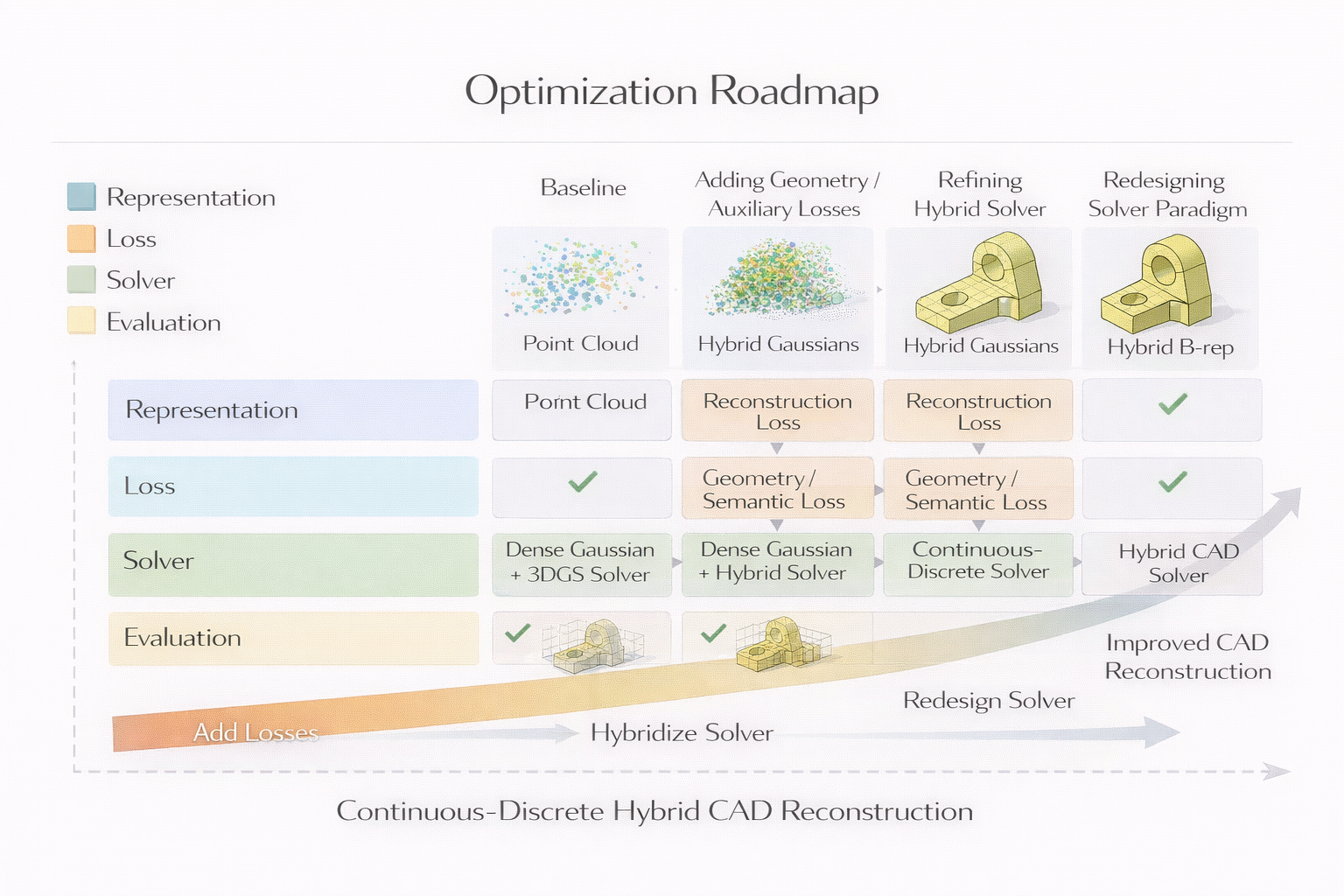
7.9 面向下一阶段的优化路线图:从"补约束"到"重构求解范式"
在统一视角下,下一阶段真正有价值的优化,不应再停留于"再加一个 loss",而应分为四类:
7.9.1 表示层优化:从单一表示转向双/三重表示耦合
建议路线:
- Gaussian + SDF:解决全局曲面与局部细节张力;
- Gaussian + Curves/Patches:让结构元进入主变量;
- Gaussian + SDF + Patch/Primitive:形成渲染、连续几何、低维结构元的三层协同。
这一路线的底层理由很简单:单一表示通常只在某一层表现最好,很难同时兼顾渲染效率、几何精度、结构可解释性和拓扑合法性。
7.9.2 损失层优化:从单层误差转向层间一致性
建议重点不是独立设计 L render \mathcal{L}{\text{render}} Lrender、 L geom \mathcal{L}{\text{geom}} Lgeom 等,而是设计 层间耦合损失,例如:
- Gaussian 主方向与 SDF 法向一致;
- 曲线代理高斯与相邻 patch 交线一致;
- 拓扑修复后的 incidence 反约束回 patch 边界;
- 参数域 trim 与三维边界曲线双向一致。
也就是说,未来更有价值的是 cross-level consistency,而不是单层 regularization 内卷。
7.9.3 求解层优化:从纯梯度下降转向连续-离散混合求解
这是最关键的一点。
只要目标中真实包含 trim legality、incidence legality、patch type switching、primitive routing,就不应再幻想"纯 SGD 一路打通"。更现实的范式是:
- 前端:连续可微优化;
- 中端:结构元拟合、EM / graph optimization / routing;
- 后端:离散拓扑修复、合法性检查、几何内核验证。
这是问题本性决定的。
7.9.4 数据与评估层优化:从表面误差转向结构/拓扑指标
仅用 Chamfer / normal / PSNR / SSIM 评价系统,不够,需要补:
- edge correctness;
- patch segmentation consistency;
- trim loop validity;
- face-edge-vertex incidence accuracy;
- shell / solid validity rate;
- STEP / B-rep export success rate。
只有评价体系升级,方法才不会一直停留在"高质量假几何"阶段。
8. Part II 结语
8.1 本 Part 真正完成的,不是"论文罗列",而是问题解剖
到这一部分为止,问题已经足够清楚。
如果 Part I 主要想讲一下"3DGS 为什么天然适合做可微中间表示", Part II 主要讨论的是这个中间表示一步步推向工程几何语义,并明确指出每向前走一层,新增的约束到底是什么。
这一部分我们已经看到:
- SurfaceSplat 通过 SDF / mesh 与 3DGS 的循环耦合,补的是全局几何一致性;
- Curve-Aware Gaussian Splatting 通过曲线与 Gaussian 的双向耦合,把参数曲线拉进主优化变量,补的是结构元层;
- GaussianCAD 通过 orthographic pose prior、sketch augmentation 与 visual hull 初始化,把 3DGS 推进到设计表达输入域;
- Point2CAD 则用一条完整的点云到 B-rep 逆向链路,暴露了 surface--edge--corner--trim--topology 的不可绕过性。
这几条路线并非互相替代,而是在共同让我们看清,3DGS 离工程 CAD 还差的,并不是一个"更强 backbone",而是一整套逐层补齐的约束制度。
8.2 最关键的结论:补几何与补结构元,都只是前奏
如果把 Part II 的全部论证压缩成一句的话,那就是:
补几何与补结构元都只是前奏。真正艰难的,是把这些局部结构组织成合法、可编辑、可交付的 B-rep。
因为工程语义关心的不是:
- 表面是否足够平滑;
- 点云距离是否够低;
- 渲染是否足够逼真;
而是:
- 哪条边属于哪两个面;
- 哪个 trim loop 在哪个参数域闭合;
- 哪些 patch 共同组成合法 shell;
- 哪个 shell 能否闭合为实体;
- 这些对象能否进入 STEP / B-rep / CAD kernel 的合法数据结构。
更抽象地说,最终目标不是只寻找一个三维几何集合 M ⊂ R 3 \mathcal{M}\subset\mathbb{R}^3 M⊂R3,而是要寻找满足
B ∈ L B-rep ∩ C edit ∩ C exchange ∩ C manufacture (88) \mathcal{B}\in \mathfrak{L}{\text{B-rep}} \cap \mathfrak{C}{\text{edit}} \cap \mathfrak{C}{\text{exchange}} \cap \mathfrak{C}{\text{manufacture}} \tag{88} B∈LB-rep∩Cedit∩Cexchange∩Cmanufacture(88)
也就是说,真正工业可交付的对象,活在多个合法性集合的交集中:
几何上可解释,拓扑上合法,编辑上稳定,交换上规范,制造上可消费。
任何只满足其中一个子集的结果,都还不算真正穿透工业几何链路。
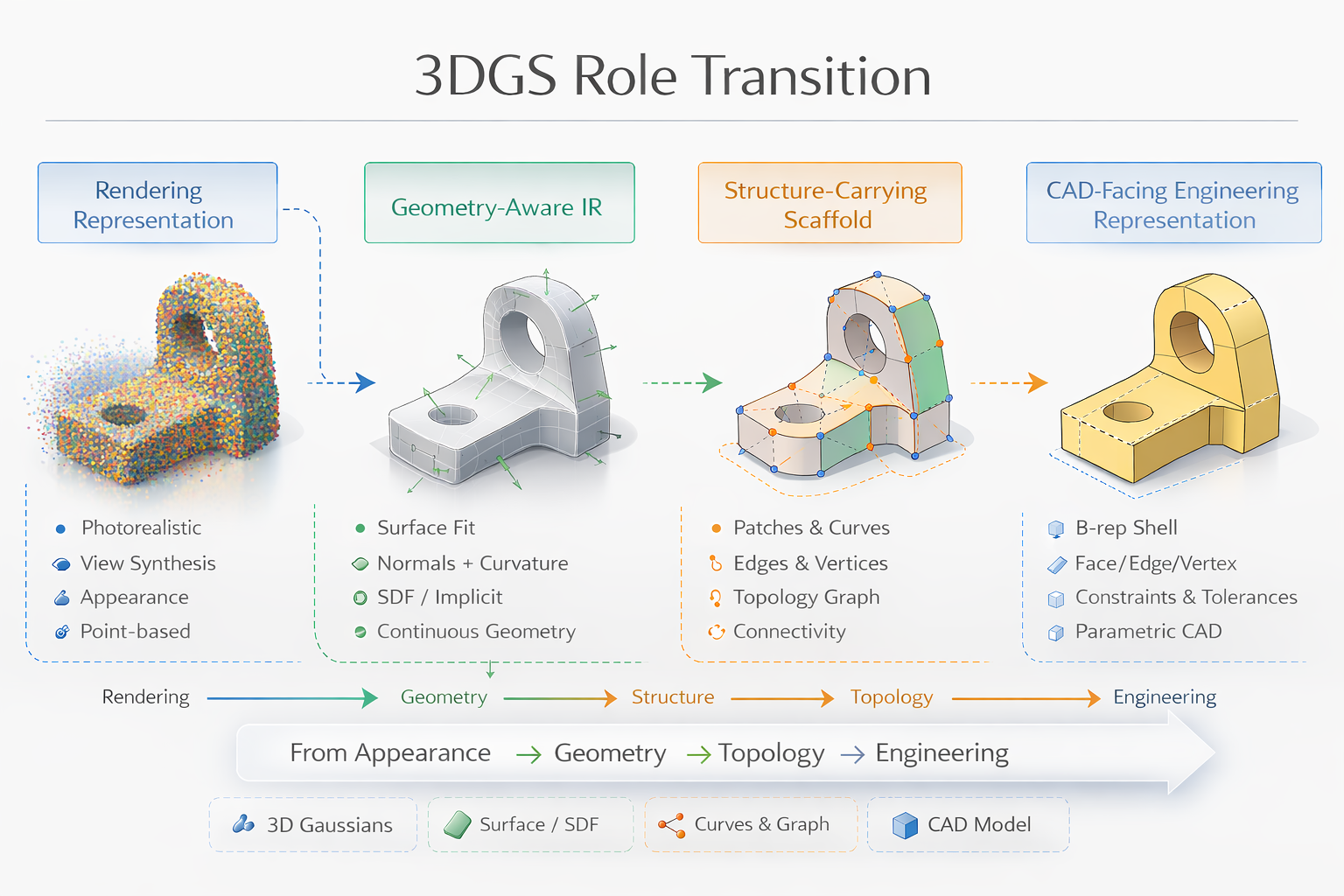
8.3 3DGS 已经发生角色迁移:它正在从"画师"变成"几何中间层"
Part II 的另一个结论,是 3DGS 的角色已经悄悄发生迁移。
最初的 3DGS 主要被理解为:
- 一种高效的新视图合成表示;
- 一种替代 NeRF 的显式 radiance field 近似;
- 一种适合实时渲染的各向异性高斯体元系统。
但走到 Part II 这里,它的角色已经开始变化:
- 它不再只是 appearance model,而是 geometry-aware intermediate representation。
- 它不再只是 scene fitting tool,而是 structure-carrying optimization scaffold。
- 它不再只接受照片输入,而开始尝试消费工程草图、设计表达与结构先验。
这意味着,3DGS 未来最有潜力的身份,未必是"更快的 NeRF",而更可能是:
连接图像证据、可微几何、结构元优化与拓扑推理的中间表示层。
早期 3DGS 更像一位画师;现在它开始被要求兼任测绘员、几何书记员、结构工程助理。画得像已经不够,还得量得准、记得清、关系对。
8.4 BrepGaussian的拓扑装配与合法性修复
上述所有工作都还没有真正穿透 topology layer,我将会在Part III讨论他。
从逻辑上说,Part II 已经完成了全部必要铺垫:
- 我们已经知道 Gaussian 原生擅长什么、不擅长什么;
- 我们已经知道 NeuS / VolSDF 式几何锚点为什么关键;
- 我们已经知道参数曲线与结构元为什么必须直接进入优化变量;
- 我们已经知道 design-expression input 会如何重写问题设定;
- 我们也已经知道 Point2CAD 式后端逆向链路为什么不能被轻视。
于是,下一步问题会不可避免地收敛到:
- 如何把 patch、edge、corner、trim、adjacency 组织成合法 B-rep?
- 哪些拓扑变量可以学习,哪些必须交给离散求解与几何内核?
- BrepGaussian 到底是在"直接输出 B-rep",还是在"把 B-rep 链条前移到图像/Gaussian 域"?
- 若几何拟合正确但拓扑不合法,系统应如何修复?
- 合法性、可编辑性、可交换性与可制造性如何统一到同一框架中?
8.5 面向后续研究的明确优化方向(本文综合建议)
基于本 Part 的统一视角,面向下一阶段的研究与系统构建,我给出以下明确优化方向:
方向 A:双/三重表示协同,而非单表示一统天下
推荐优先级最高的路线是:
- Gaussian 负责渲染与局部细节;
- SDF / mesh 负责全局曲面锚定;
- Curves / patches / primitives 负责低维结构语义;
- 拓扑对象交给离散后端与几何内核验证。
这比单纯坚持"一套表示包打天下"更符合问题本性。
方向 B:在参数域而不是 3D 末端补 trim
trim legality 的真正战场在 uv / chart 域,而不是 3D 里最后"贴边修补"。
谁能率先把参数化与 trim 恢复前移到结构层,谁就更接近真正工业 B-rep。
方向 C:把拓扑看作约束系统,而不是结果注释
未来系统不应在最后"顺便导出拓扑",而应从结构层开始就引入:
- incidence prior;
- adjacency prior;
- edge-face compatibility;
- shell validity checks。
也就是说,拓扑应成为求解器的一部分,而不是结果导出脚本的一部分。
方向 D:评价体系升级
未来如果还只看 PSNR、Chamfer、normal consistency,很多"高质量假几何"会继续被误判为进步。
必须补上:
- edge correctness;
- patch correctness;
- trim validity;
- face-edge-vertex incidence accuracy;
- shell/solid validity rate;
- STEP/B-rep export success rate。
方法学真正的转折点,往往不是模型先变,而是评估标准先变。
8.6 Part II 讨论了什么
因此,Part II 的最终结论可以明确写成如下版本:
3DGS 已经不再满足于做渲染表示,而正在向几何处理中间表示、再向结构化工程表示演进。 SurfaceSplat 补几何,Curve-Aware GS 补结构,GaussianCAD 改写输入域,Point2CAD 则暴露拓扑装配不可绕过的约束链。
由此可见,3DGS 走向 CAD/B-rep 并不是"多加几个头"这么简单,而是一次从渲染域到几何域、再到拓扑域的表示制度迁移。真正艰难的,不再是如何把东西看起来重建出来,而是如何把它们组织成合法、可编辑、可交付的工程几何对象。
今天的 3DGS,已经学会了把世界"画得像";正在学习把世界"量得准";而真正决定它能否进入工业 CAD 腹地的,将是它何时学会把世界"记成合法的几何秩序"。