核心论点:从"图像修补"到"物理重构"------开启全天候视觉感知的第二曲线
本方案论证了在极低光照(-6.7EV)的物理极限下,通过引入事件驱动的异步感知范式,可有效弥补传统 CMOS 图像传感器在采样间隙与动态范围上的本质缺陷,实现高保真度、高分辨率的视频重建。
一、背景:传统 LVSR 算法的"无米之炊"
在低光视频超分辨率(LVSR)任务中,传统感知方案面临双重困境:
-
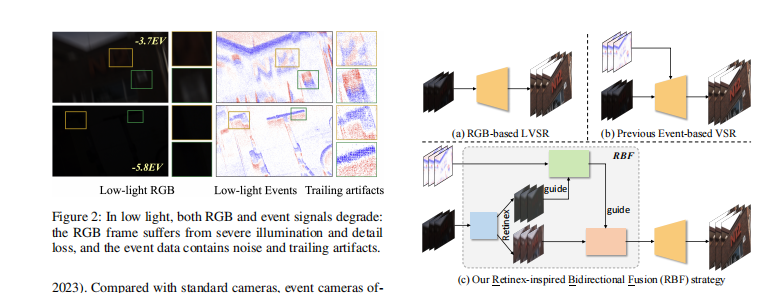
首先是物理层面的信号缺失,-6.7EV 环境下的 RGB 帧由于光子稀疏,其高频纹理几乎完全被热噪声淹没;
-
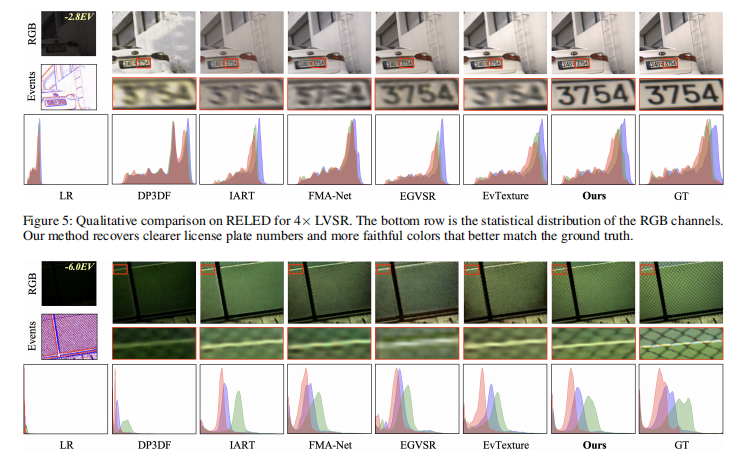
其次是算法层面的"幻觉"风险,即便最先进的深度学习模型,在缺乏原始对比度支撑时,也难以在空域超分与时域对齐中还原出真实的物体边缘。
这种感知的"盲区"直接限制了机器视觉在极端环境下的可靠性。
二、工程实践:灵光 1 号 (ShiMetaPi)
灵光 1 号 (ShiMetaPi) 凭借其"RGB+EVS"的多模态架构,为论文中提出的 RetinexEVSR 理论提供了理想的硬件物理载体。

-
ALPIX-Eiger 传感器的物理补偿论文算法成功重建细节的前提是获取可靠的"高频脉冲"。灵光 1 号搭载的 ALPIX-Eiger 事件传感器具备微秒级响应速度与极高的对比度灵敏度,能在 RGB 帧呈现一片漆黑的区域,精准捕获光强变化的动态残影,为后端算法提供了不可或缺的物理级"高频骨架"。
-
多模态硬件级融合架构针对论文中复杂的"双向跨模态融合(BCMF)"逻辑,灵光 1 号在设计之初便考虑了 Event 与 RGB 的时空对齐。通过其高带宽的传输链路,系统能够将稀疏事件流与退化的 RGB 特征进行像素级映射,确保了 Retinex 模型解构出的光照图能精准引导事件特征的注入,从而在抑制噪声的同时强化纹理。
-
光学扩展性与超分协同灵光 1 号兼容 CS/M12 标准接口,赋予了系统极强的光学定制能力。在执行论文提及的"变焦(Zooming)"任务时,用户可通过更换高性能镜头获取原始光学增益,结合后端超分算法,实现从物理变焦到数字增强的全链路闭环。
注:本方案所述硬件搭配仅作为一种工程实现的可能路径,实际表现取决于具体的算法集成与系统调优。
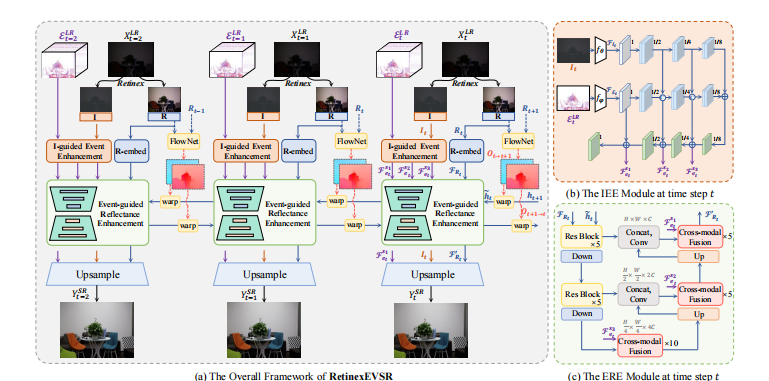
三、方法深度拆解:Retinex 引导的异步感知逻辑
该方案的核心算法逻辑在于其对"光影关系"的重塑:
- 物理启发式分解利用 Retinex 理论将视频序列分解为反射分量与光照分量。算法不再对全图进行盲目增益,而是通过光照掩模(Illumination Map)识别出极暗区域。
- 事件增强模块(EEM) 在光照掩模的引导下,模块对 灵光 1 号 采集的原始事件流进行自适应优化。在光照最弱处,系统自动调高事件特征的权重,利用其高动态范围(HDR)特性填充丢失的细节。
- 时空一致性聚合引入跨模态注意力机制,在时间维度上累积事件能量,在空间维度上对齐 RGB 特征,从而解决低光环境下因长曝光产生的拖影与模糊问题。
四、贡献:学术突破与行业价值
该方案的价值在于其打破了"必须依靠补光才能成像"的思维定势。
-
学术上:它验证了异步事件信号对稳态 RGB 信号的强大补偿能力;
-
行业层面:这标志着感知系统具备了在全天候、全场景下的"透视"能力。
无论是精密工业监控、复杂环境下的自主导航,还是高端科研观测,这种基于 灵光 1 号 的多模态方案都展现了极高的应用弹性。
五、总结与展望
随着感知需求从"记录世界"转向"理解极限",基于事件驱动的物理重构已成为跨越感知瓶颈的关键。灵光 1 号 (ShiMetaPi) 通过对底层感知模态的革新,配合前沿的超分算法,正在重新定义低光视觉的边界。未来,这种"软硬一体"的异步感知方案将为更多挑战物理极限的场景提供参考范式。
免责声明
本文所述技术原理参考 arXiv:2601.02206v1 论文,产品特性基于 灵光 1 号 (ShiMetaPi) 相关规格说明。实际落地效果受环境照度、光学配置及后端算力影响,具体性能指标以实测为准。
论文原址:Seeing the Unseen: Zooming in the Dark with Event Cameras (arXiv:2601.02206v1)