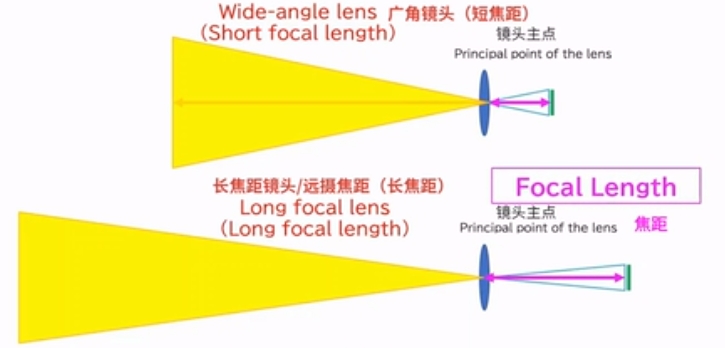
工业镜头作为工业相机的"眼睛",需要搭配合适的,而在选型中,我们需要考虑的一个重要参数是视角。
视角(AOV),用来表示图像的实际范围(由相机拍摄)。AOV随着焦距的变化而变化。我们通过实物成像来更好的认识它。
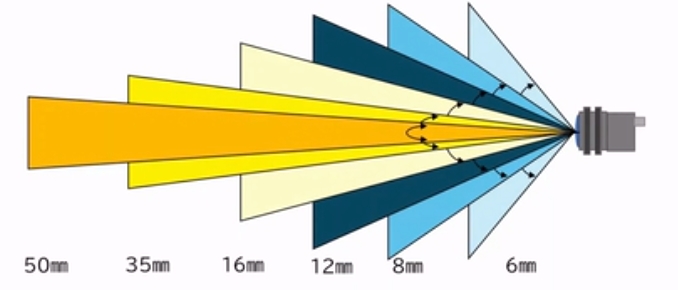
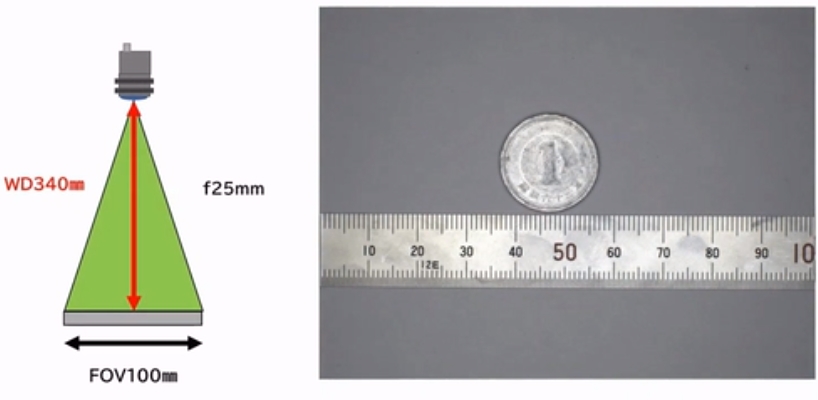
在工作距离WD不变的情况下,焦距越短,视野(FOV)越宽;焦距越长,视野(FOV )越窄。
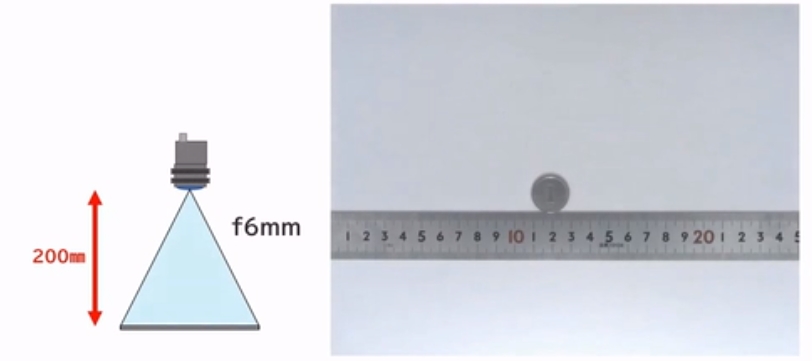
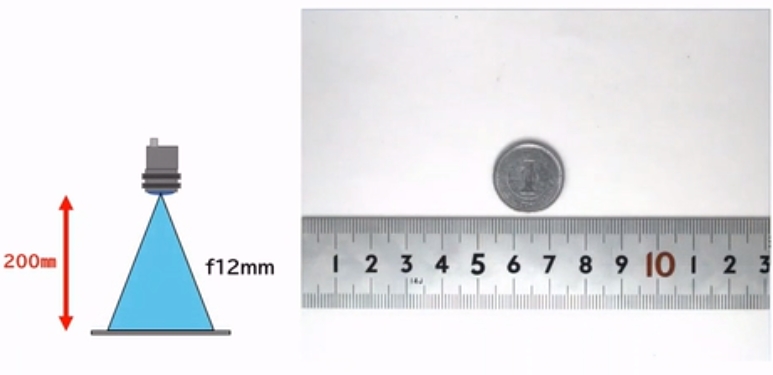
相同WD下,不同AOV下硬币实拍图。
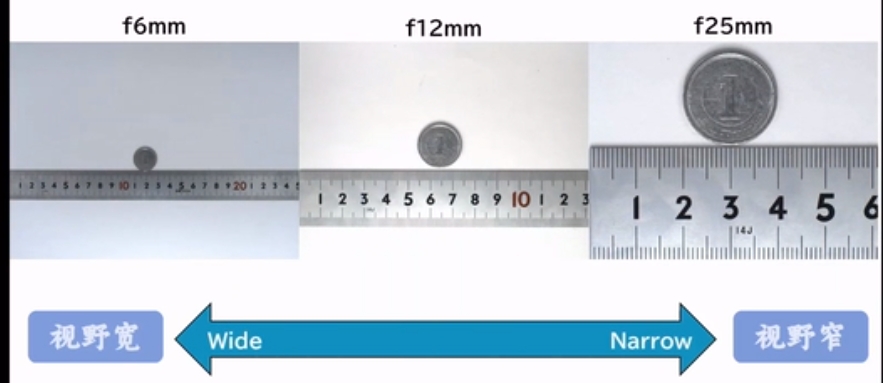
如上图所示,焦距越短,视场越大:焦距越长,视场越小。
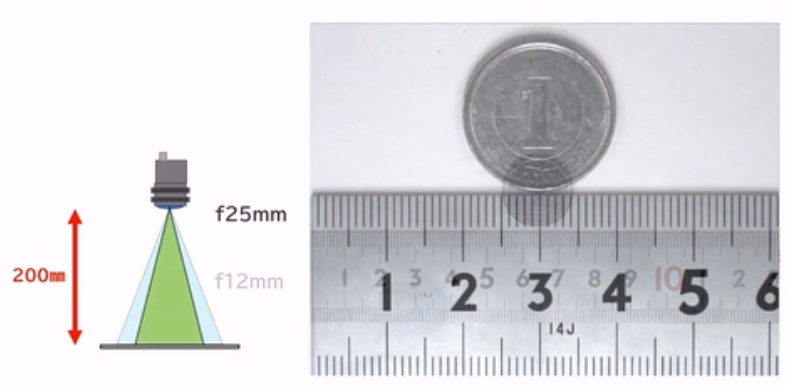
在同一视场内成像时:焦距越短,WD就越短;焦距越长,WD就越长。
相同FOV下,不同的AOV的实拍图。
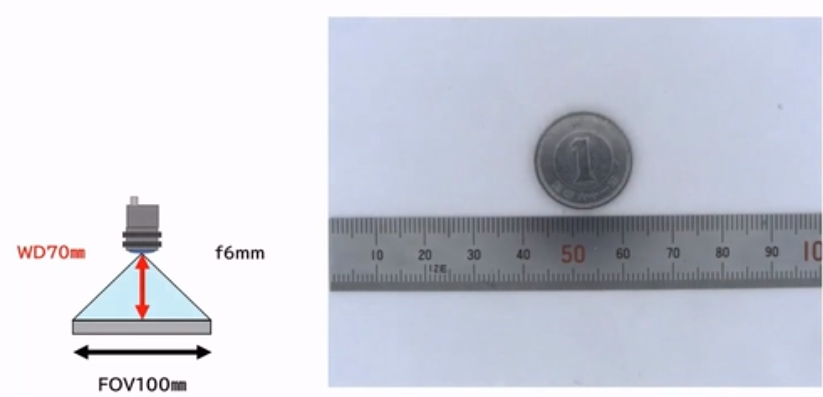
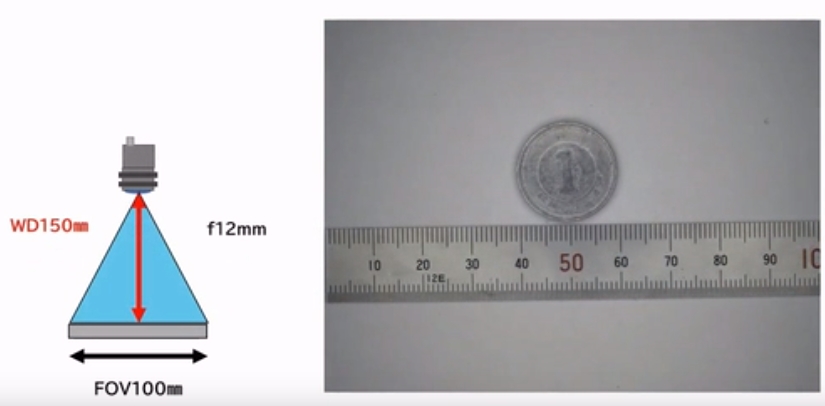
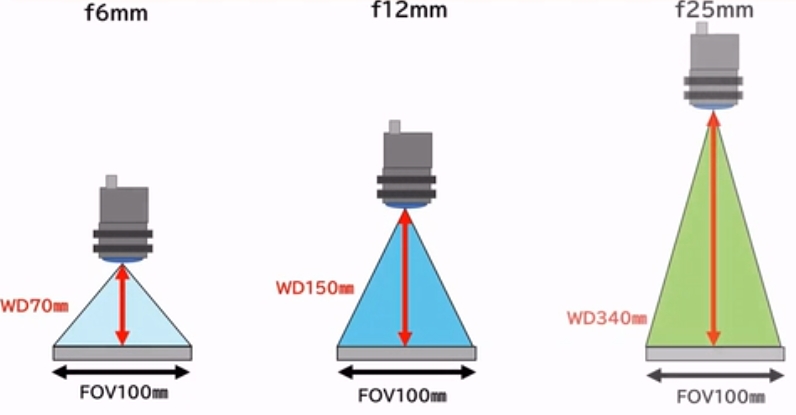
如上图所示,焦距越短,WD越短;焦距越长,WD越长。
我们可以通过改变焦距做什么?
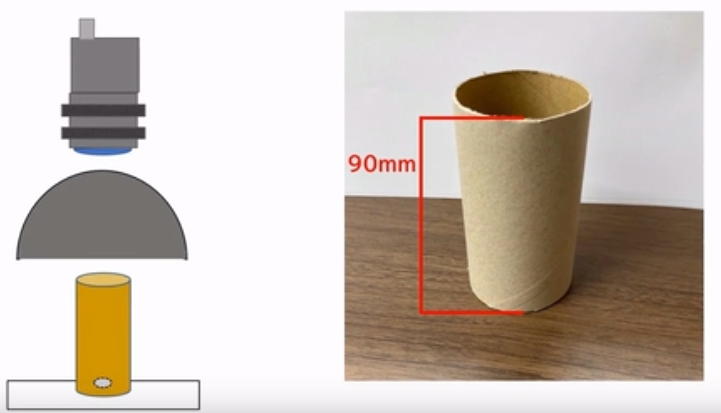
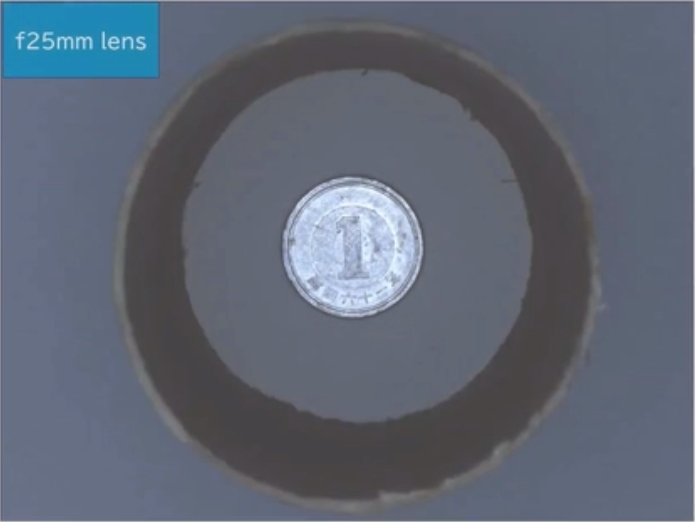
下面我们来拍摄圆筒内的硬币
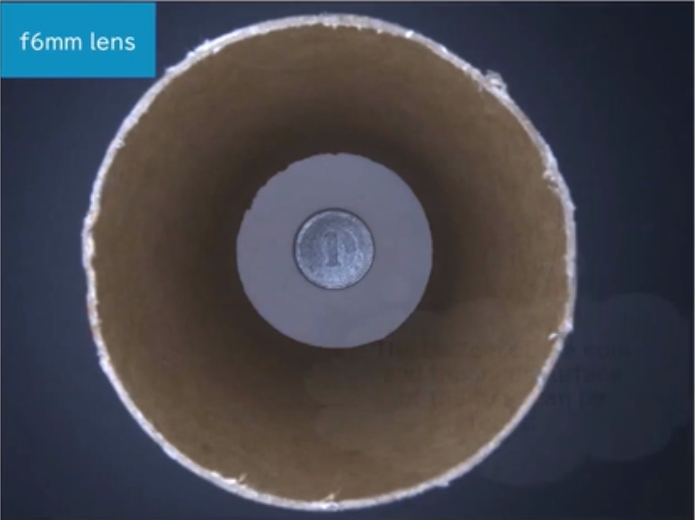
F6mm
可能会同时对焦于底部被测物硬巾以及圆筒内侧面。
F25mm
由于是长焦镜头 圆筒内侧面的影响减少 被测物硬币的图像显得示更大。
用远心镜头观测同一物体,远心镜头由于AOV接近于0°,圆筒的内侧面不会被拍摄下来。
