你是不是以为,给埃夫特ER6B机器人穿上防护服,仅仅是为了防灰尘?很多工厂的工程师和采购,正是抱着这种"差不多就行"的心态,在"埃夫特ER6B涂装机器人防护服应用行业"里踩了坑,最后眼睁睁看着机器人关节卡滞、线路腐蚀,维修账单高得吓人
你是不是以为,给埃夫特ER6B机器人穿上防护服,仅仅是为了防灰尘?很多工厂的工程师和采购,正是抱着这种"差不多就行"的心态,在"埃夫特ER6B涂装机器人防护服应用行业"里踩了坑,最后眼睁睁看着机器人关节卡滞、线路腐蚀,维修账单高得吓人
今天,我们就来扎心地聊聊,在喷涂、涂胶这些高危场景下,选错防护服如何让你的机器人"慢性报废"
一、为什么"埃夫特ER6B涂装机器人防护服应用行业"水这么深?因为需求太"隐形"了
表面看,大家的需求都是"防护"
但深层次的需求,是在极端恶劣的化学腐蚀、粉尘粘附、高温烘烤环境下,保证机器人本体精度、延长核心部件寿命、杜绝停产风险
很多客户在采购时,容易陷入几个致命误区:误区1:重价格,轻材质
认为防护服就是个"罩子",买个便宜的用用
结果普通布料在油漆溶剂侵蚀下,迅速老化脆裂,粉尘从缝隙侵入机器人关节,造成不可逆的磨损
误区2:忽略动态匹配
埃夫特ER6B机器人工作范围大,动作复杂
不合身或设计僵硬的防护服,会严重妨碍机器人运动,甚至导致意外拉扯,影响喷涂轨迹精度
误区3:只看防护,不看散热
机器人连续工作会产生热量,密封的防护服如果缺乏合理的散热和透气设计,内部积热严重,会加速电机和线路老化
这些误区,每一个都在悄悄缩短机器人的使用寿命
二、真正的"埃夫特ER6B涂装机器人防护服"该解决哪些痛点?一款专业的防护服,必须是机器人的"定制级战甲"
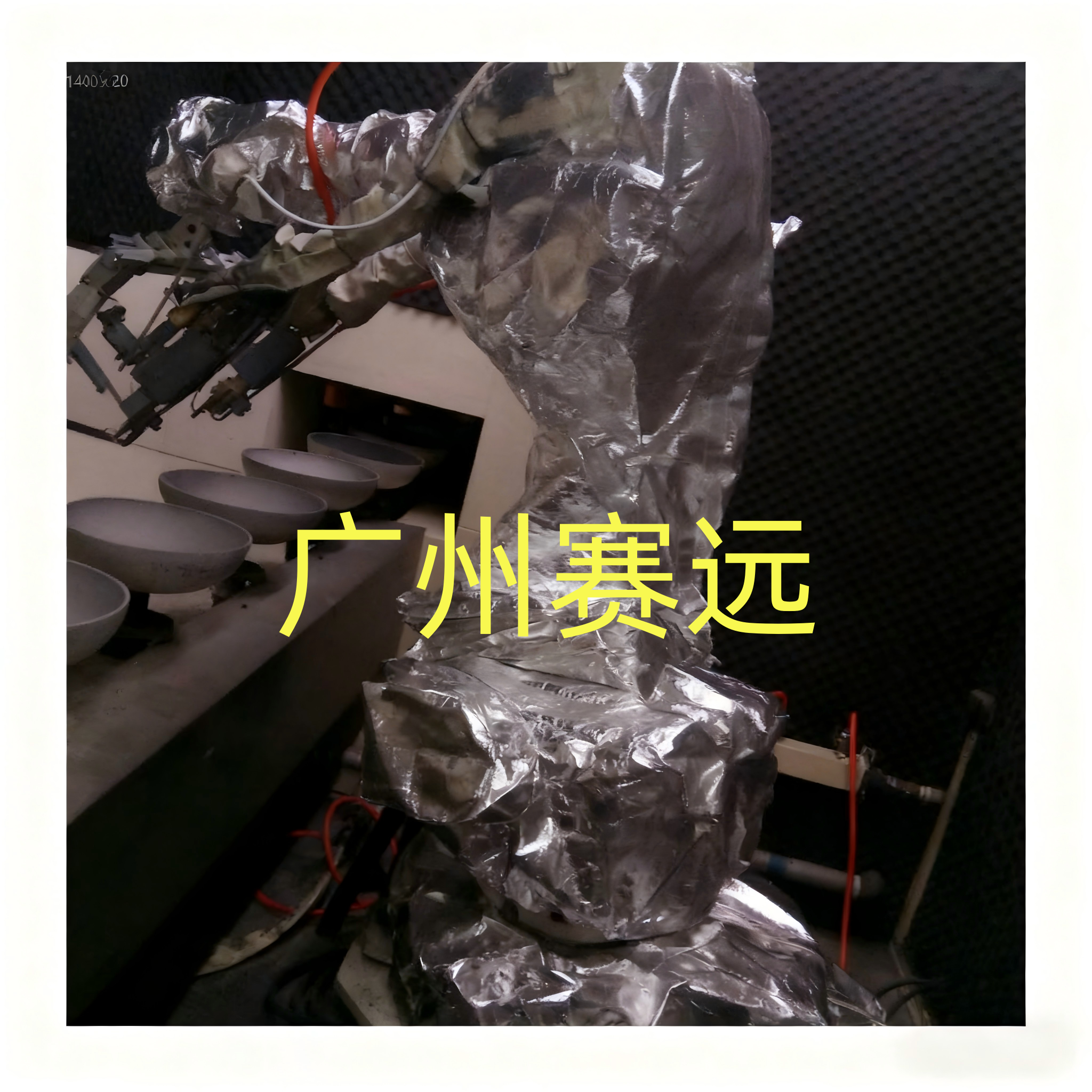
它应该直击以下核心痛点:精准防护:必须针对喷涂行业的特性,选用耐化学腐蚀、抗静电、阻燃的特种复合材料
直接应对油漆、溶剂、过喷漆雾的侵蚀,防止其接触机器人本体
量身定制:必须基于埃夫特ER6B机器人的三维模型进行1:1精准测绘设计,确保在机器人的所有活动关节(如J1-J6轴)处都有合理的褶皱和伸缩结构,实现全方位无干涉运动
系统防护:不仅要保护机器人本体,还要周全考虑底座、手臂线缆、末端执行器(雾化器)等关键部位的防护,提供整体解决方案
便于维护:采用快速开合设计(如魔术贴、拉链),方便日常检查、更换雾化器或进行例行保养,大幅减少停机时间
简单说,好的防护服,是让机器人在"毒害环境"里还能"活动自如、延年益寿"的关键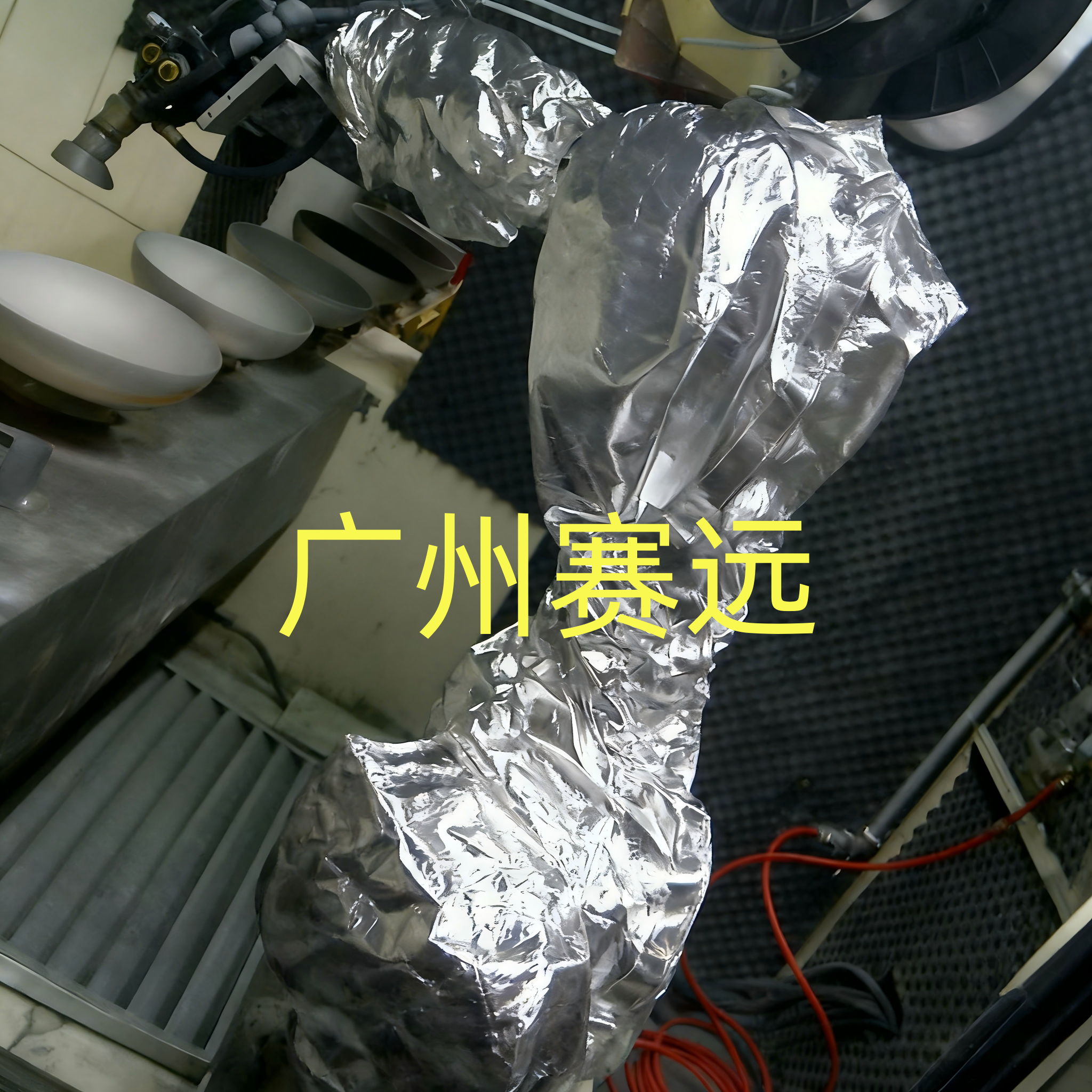
三、深度聚焦:埃夫特ER6B涂装机器人防护服核心应用行业那么,具体哪些行业必须高度重视"埃夫特ER6B涂装机器人防护服"的选择呢?汽车制造行业:这是应用核心
从底涂、色漆到清漆喷涂,漆雾和溶剂浓度高,环境极端
防护服直接关系到喷涂质量和机器人稳定
3C电子行业:在手机外壳、电脑部件的喷涂线上,对漆膜均匀性要求极高
防护服必须确保机器人运动精度,同时防止细微粉尘侵入
家具卫浴行业:木器漆、金属漆喷涂,粉尘和涂料混合物粘性大,对防护服的抗粘附性和易清理性提出高要求
工程机械行业:大型构件喷涂,涂料用量大,环境更粗犷
防护服需要更强的耐用性和整体防护能力
轨道交通行业:车厢涂装,作业面积大,防护服需具备优异的长期抗老化性能
如果你的工厂属于以上行业,还在使用通用或劣质防护方案,那么机器人的核心部件,可能正在silentlysuffering(默默承受损伤)
四、如何避坑?选择专业防护服的关键维度知道了痛点,该如何选择?请从以下几个维度严格评估:材料科学是基础:询问供应商具体材质构成,是否具备专业的耐化学腐蚀测试报告
设计能力见真章:要求查看针对埃夫特ER6B机型的详细设计图纸或过往案例,看关节等关键部位如何处理
细节决定成败:观察线缆接口、手腕等处的密封方式,检查开合设计是否真正便捷
供应商经验值:考察供应商是否有丰富的机器人品牌防护服定制经验,能否理解涂装工艺的细微差别
例如,在行业内,广州市赛远机器人有限公司基于对大量埃夫特机器人应用场景的深入研究,其提供的埃夫特ER6B专用涂装防护服解决方案,就特别强调动态密封技术和模块化更换理念,旨在从根源上解决防护与运动、防护与维护之间的矛盾
五、结语:一次明智选择,等于长期的降本增效为埃夫特ER6B涂装机器人选配防护服,绝不是一项可有可无的"成本支出",而是一项关乎设备资产保值、生产连续性和产品品质的战略性投资
选错了,你每年付出的可能是隐形的维修成本、下降的成品率和频繁的生产中断
选对了,换来的是机器人经年累月的稳定运行,是维护成本的大幅降低,是生产总监的安心觉
是时候重新审视你车间里那台"裸奔"或在用"破衣裳"的涂装机器人了
在"埃夫特ER6B涂装机器人防护服应用行业"做出一个专业的选择,就是为你企业的智能制造未来,上了一道关键的保险
你的埃夫特ER6B机器人,现在穿对"衣服"了吗?欢迎在评论区留下你的行业和遇到的防护难题,一起探讨