又一位华为天才少年加入具身智能创业战场。
6G 冲浪的量子位最新发现,去年从华为诺亚方舟实验室转入学界的周凯文,在入职港中文不到半年后,悄然更新了个人主页。
他已加入具身创企诺因智能,担任合伙人兼算法主管。
顺着周凯文人事变动这条线往下扒,我们发现了三条很值得和大家分享的信息。
第一,这家叫诺因智能的具身智能创业公司,成立时间很短,不满一年,但已经聚集了一批履历极强的技术人员。
第二,该公司选择的方向,是当前争议最大、也最难落地的 ToC 具身智能机器人。
第三,也是比较亮眼的一点,诺因智能刚发了个新具身模型,已经在一个具身智能权威榜单上拿下第一。
综上,这家半年内连融三轮,但相当低调的具身公司,已经越来越掩藏不住了。
从一条人事变动,扒一扒 ToC 具身低调玩家
在火热的具身智能赛道,顶级人才的流动本身就是一个重要信号。
周凯文 2013 年以信息奥林匹克竞赛保送复旦大学,2019 年在香港中文大学拿到计算机科学与工程的硕士学位,而后又在港中文攻读博士学位。
2022 年博士毕业后,周凯文以 "华为天才少年" 身份加入华为诺亚方舟实验室。业内人士告知,他是诺亚决策与推理实验室第一位天才少年。
华为诺亚方舟实验室是成立于 2012 年的 AI 研究机构,专注于 AI 基础算法与产业应用,其中决策与推理实验室研究方向涵盖自动驾驶、具身智能、大模型推理等前沿方向。华为的自动驾驶和具身智能业务都离不开诺亚的孵化。
2025 年,工作 3 年的周凯文离开华为,来到香港中文大学系统工程与工程管理系工作。
近日,周凯文更新个人主页,表示已经离开高校,加入具身创业大军。
大厂核心人才→加入高校→再次回归创业公司,这样的职业路径通常意味着两件事。
一是技术判断发生变化,认为产业落地窗口已经出现;二是目标公司在某个关键方向上具备足够吸引力。
具身智能赛道的火热早已无需多言,大厂布局、初创扎堆,资本和人才持续涌入,但诺因智能绝对是赛道中一个低调的存在------全网资料寥寥,除了晚点团队的一次专访,创始团队几乎没有对外发声过。
但我们还是结合多方消息,勾勒出了这家公司的轮廓。

诺因智能成立于 2025 年 7 月,总部坐落于深圳。
成立仅小半年时间,就已连续完成了种子轮、天使轮、天使 + 轮三轮融资,投后估值超 20 亿元人民币,是目前国内少数专注 ToC 具身智能方向、且融资节奏强劲的创业公司之一。
不同于当下赛道中多数企业聚焦 ToB 工业场景,诺因智能从诞生之初,就将目标直指家庭消费场景。
讲真,家庭场景远比工业场景复杂,光照变化、背景干扰、物品形态的多样性,以及层出不穷的长尾任务,都让 ToC 家用具身智能机器人的研发难度呈指数级上升。
这也是为何该方向始终争议不断、落地缓慢。
哪怕掰着指头细数,ToC 具身智能在国内玩家也真的没两家;也就国外有零星几家公司声量不错------比如前几天刚宣布完成 B 轮融资、估值来到 11.5 亿美元的 Sunday Robotics。
用视觉生成模型给具身机器人喂数据
继续往下看。
除了落地场景与众不同外,诺因与其它具身智能公司的核心差异,其实集中在技术路线。
目前具身智能在采集训练数据时,通常有遥操作数据、仿真数据、人类视频数据、UMI 等解法。
量子位了解到,诺因采集数据的方式比较先锋,通过生成式模型构建专属训练数据体系,用视频生成的数据来训练具身大模型。

这里唠几句视频生成模型生成数据和一般仿真合成数据的区别。
仿真合成数据,需要投入大量人力进行精细的场景建模,把所有资产、物理规律逐一嵌入,完成一个场景的建模后,才能基于该场景迭代数据。
视频生成模型合成数据,所有的场景都是自动化生成的,光照、背景、纹理等关键要素都能实现多样化调整,直接省去了人力建模的繁琐过程。
理论上,后者能无限量产出适配家庭复杂场景的训练数据。
此外,诺因官网相关资料显示,该公司的具身模型采用了自研的 KNOWIN 具身基础模型架构。
如下图所示,这是一套从数据、认知到执行的生成式闭环系统。
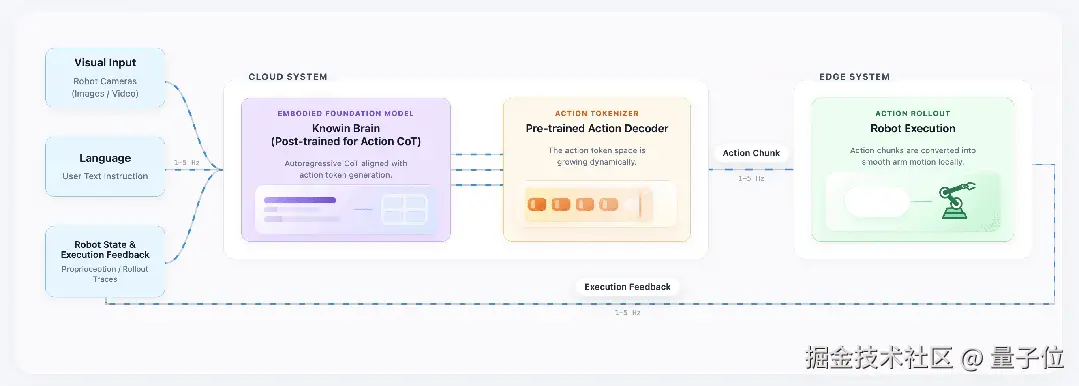
这套架构以云端系统为核心大脑、边缘系统为执行终端。
输入端整合机器人摄像头视觉数据、用户文本指令与本体状态反馈,以 1-5Hz 的频率同步输入云端 KnowinBrain 具身基座。
经过 Action CoT 后训练的 KnowinBrain,能基于自回归逻辑完成动作思考与策略规划,再将决策结果传递给预训练的 Action Tokenizer。
Action Tokenizer 作为生成式动作编解码器,会把 KnowinBrain 输出的 Action Token 高效解码为可泛化执行的 Action Chunk,最终由边缘端转化为平滑连贯的机械臂操作。
同时,机器人执行后的状态与环境反馈会以 1-5Hz 频率回传云端,让 KnowinBrain 实时评估物理状态、自主修正策略,形成完整的 "感知 - 决策 - 执行 - 反馈" 闭环。
支撑这套架构的核心是 KnowinDream 生成式数据引擎,它从有限真实数据中学习场景规律,合成海量覆盖极端光照、复杂材质的机械臂操作视频,解决了行业真实数据匮乏的痛点。
而动态扩容的 Action Token Space,能让机器人的物理执行能力随场景拓展持续进化。
最主要的是,这条路线已经被诺因跑通了。
在模型层面,这条路线也得到了更直接的验证。
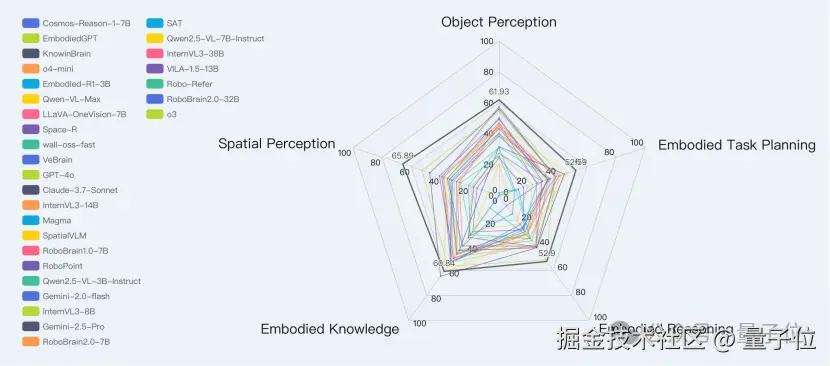
最近在具身智能评测榜单 Embodied Arena 中,诺因的模型 KnowinBrain 拿下了总榜第一。
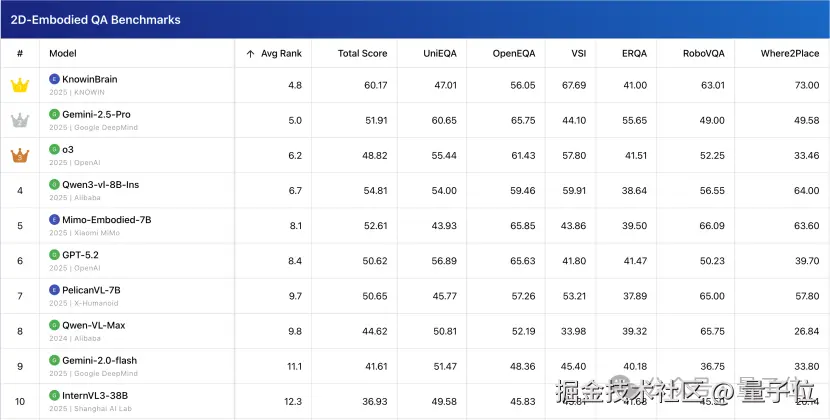
Embodied Arena 是一个由国内外 10 余家院校和科研机构联合研发推出的具身智能评测平台,核心研发成员来自天津大学、上海交通大学、伦敦大学学院、北京大学、清华大学等全球知名机构的研究人员。
Embodied Arena 全面覆盖了机器人在真实物理世界交互所需的核心能力,从空间理解、基础空间定位,到机器人操作视频问答、具身推理等,均被纳入评测范围,是目前具身领域较为全面的评测体系之一。
具身操作最相关的单项任务方面,KnowinBrain 在 Spatial Perception_(空间感知)、Object Perception (物体感知)、Embodied Reasoning (具身推理)、Embodied Task Planning(具身任务规划)_这四项能力上都排在第一。
在 Embodied Knowledge_(具身知识)_这一单项上,KnowinBrain 稍落后 Gemini-2.5-pro,位列第二。
据接近诺因的知情人士透露,KnowinBrain 背后积累了大量的 Know-how,"即便竞争对手现在看懂了逻辑去复现,起码也得花上个半年到一年的时间窗口"。
这家公司,创始团队如何?
量子位获悉,诺因目前的团队规模在 100 人左右,博士占比超过 2/3。
根据官网公开资料,诺因的人才密度较高,公司成员不仅有 30 位具备大厂技术总监及以上经历的核心骨干,还有 10 位拥有知名科技硬件公司高管背景的从业者。
这种团队结构确实符合具身公司的实际需求,这个方向本身就需要 "跨学科" 能力,既要有大模型算法能力,也需要硬件、控制和产品工程能力。
从诺因目前已经公开的核心团队来看,这种结构也比较清晰。
首先来了解一下创始人兼 CEO 李银川,诺因智能妥妥的灵魂人物。
李银川 25 岁从北京理工大学和哥伦比亚大学联培博士毕业,在华为工作的五年里拿遍了公司主流大奖。
从华为出走创业前,据悉他曾是诺亚方舟实验室最年轻的项目经理。
2023 年大模型方向爆火后,他在诺亚成立了生成模型理论项目组,开始主导 AIGA 决策大模型等生成模型前沿方向探索,落地在具身智能、大模型复杂推理、自动驾驶等相关业务中。
截至文章推送,李银川累计发表过 80 多篇论文,众多被收录于 NeurIPS/ICML/ICLR 等 AI 顶会;此外,他还以第一发明人的身份拿下 30 多项专利。

通常来讲,创始人的技术背景和做事风格是一家初创公司能吸引大批顶尖技术人才的重要原因。
据诺因内部人士透露,李银川在公司属于 "内行领导内行",并且总是和公司同事 1v1 聊技术,总之一切拿技术说话......
这名不愿透露姓名的朋友原话是这样说的:
和懂行的人一起做最有挑战的难事,比大厂会更有吸引力。
再来看联合创始人王韵杰,他主要负责硬件产品与产业化方向,更多承接从模型到产品的落地。
相比低调的李银川,王韵杰还要更加低调。
遍寻全网,我们只从一些知情人士口中听到了他的背景。
据悉他是大疆晋升最快的产品项目经理。在大疆工作期间,他负责了爆款 Flip 无人机的研发。
没错,就是被大家奉为旅拍神器的那款......

参考链接:
欢迎在评论区留下你的想法!
--- 完 ---