本文介绍了一个基于 Vue 3 和 CesiumJS 的 DJI 无人机航线规划工具的开发过程,重点讲解 3D 地图可视化、坐标系统转换、KMZ 航线文件生成等核心技术实现。
前言
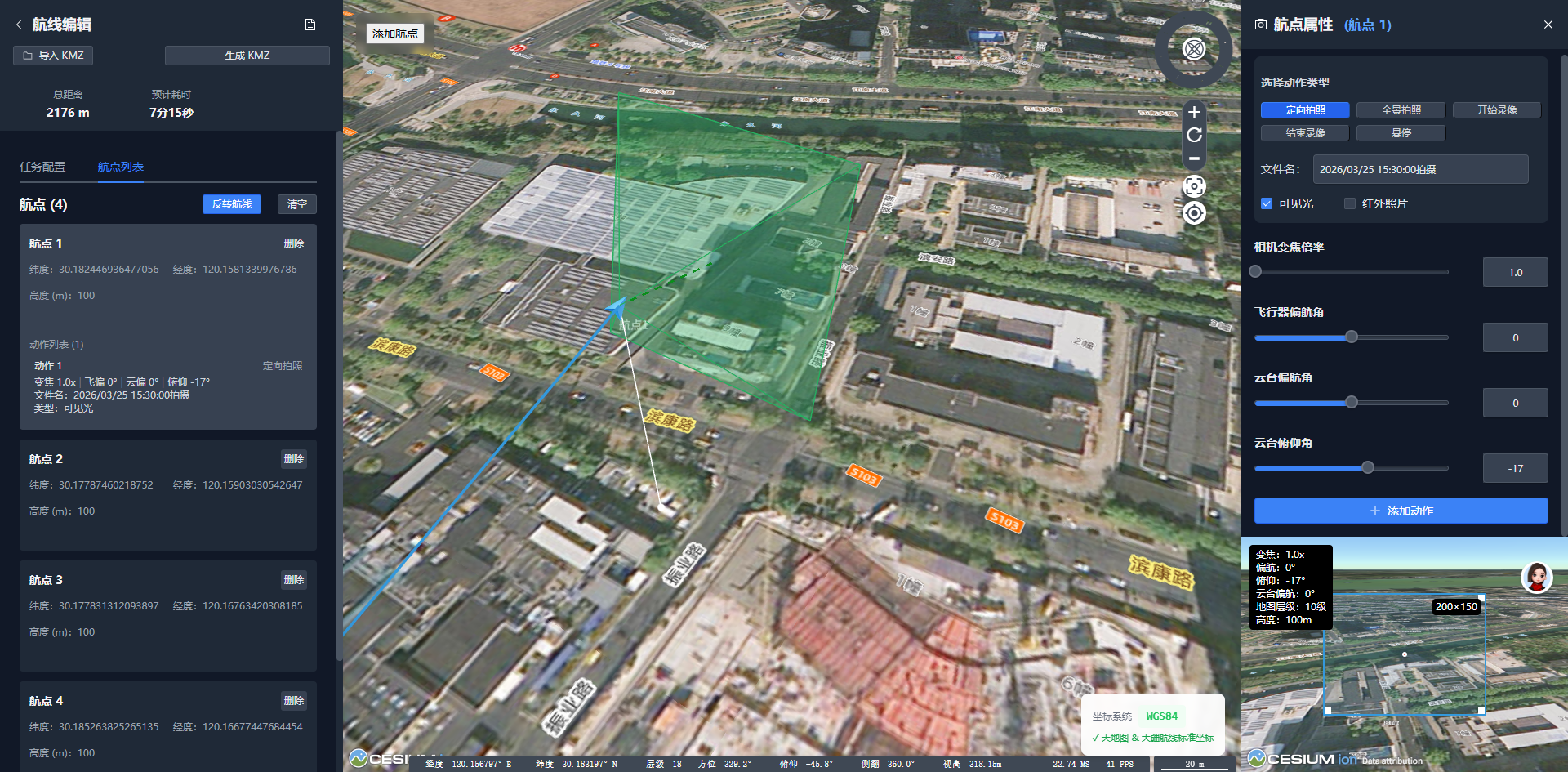
随着无人机技术的普及,自动化航线规划成为行业应用的关键需求。本文分享了一个DJI 航线生成器的开发经验,这是一个基于 Web 的无人机航线规划工具,支持生成符合 WPML 1.0.6 标准的 KMZ 航线文件,可直接导入大疆司空 2 和 Matrice 系列无人机。
一、项目背景与技术选型
1.1 业务需求
在电力巡检、安防监控、测绘等领域,无人机自动化作业需要:
-
可视化的航线规划界面
-
精确的地理坐标系统
-
符合行业标准的航线文件
-
支持多种航线类型(巡逻、面状扫描等)
1.2 技术选型
经过对比分析,我们选择了以下技术栈:
前端框架:
-
Vue 3.5:Composition API 提供更好的代码组织
-
Vite 5.4:快速的开发服务器和构建工具
地图引擎:
-
CesiumJS 1.135:强大的 3D 地球引擎,支持地形、影像等多种数据
-
Vue-Cesium 3.2:Cesium 的 Vue 封装,简化集成
底图服务:
- 高德地图/天地图:国内覆盖好,更新及时(需注意坐标系问题)
工具库:
-
JSZip:KMZ 文件压缩/解压
-
UnoCSS:原子化 CSS,提升开发效率
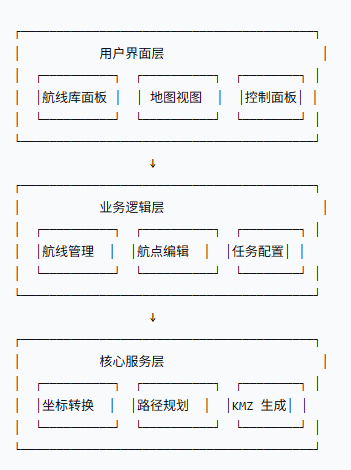
二、系统架构设计
2.1 整体架构
三、核心技术实现
3.1 坐标系统转换
问题背景
项目面临的最大挑战是坐标系不一致:
-
高德地图使用 GCJ-02(火星坐标系)
-
DJI 设备使用 WGS84(GPS 坐标系)
-
两者在中国境内存在 100-700 米偏移
解决方案
我们实现了完整的坐标转换流程:
javascript
// utils/coordTransform.js
/**
* GCJ-02 转 WGS84
* @param {number} lng - 经度
* @param {number} lat - 纬度
* @returns {Object} - {lng, lat}
*/
export function gcj02ToWgs84(lng, lat) {
if (!isChinaArea(lng, lat)) {
return { lng, lat }
}
let dLat = transformLat(lng - 105.0, lat - 35.0)
let dLng = transformLng(lng - 105.0, lat - 35.0)
const radLat = lat / 180.0 * Math.PI
let magic = Math.sin(radLat)
magic = 1 - 0.190284675272 * magic * magic
magic = Math.sqrt(magic)
const dLngFactor = (dLng * 180.0) / ((6378137.0 * Math.PI) * magic)
const dLatFactor = (dLat * 180.0) / ((6378137.0 * Math.PI) / magic)
return {
lng: lng - dLngFactor,
lat: lat - dLatFactor
}
}
/**
* WGS84 转 GCJ-02
*/
export function wgs84ToGcj02(lng, lat) {
if (!isChinaArea(lng, lat)) {
return { lng, lat }
}
const dLat = transformLat(lng - 105.0, lat - 35.0)
const dLng = transformLng(lng - 105.0, lat - 35.0)
return {
lng: lng + dLng,
lat: lat + dLat
}
}数据流设计:
-
前端存储:统一使用 GCJ-02(与高德地图一致)
-
地图显示:直接使用 GCJ-02(无偏移)
-
KMZ 导出:转换为 WGS84(DJI 标准)
这样确保了:
-
✅ 前端点击位置和显示位置完全一致
-
✅ 导入 DJI 设备后位置准确无偏移
3.2 Cesium 地图集成
3.2.1 基础配置
html
<!-- MapViewer.vue -->
<template>
<div class="map-viewer">
<vc-viewer
ref="viewerRef"
:base-layer-provider="tiandituProvider"
:zoom-out-on-double-click="false"
:selection-indicator="false"
:focus-button-indicator="false"
@ready="onViewerReady"
@click="onMapClick"
>
<!-- 天地图影像 -->
<vc-imagery-provider-tianditu
:api-key="tiandituKey"
:type="'img'"
:token="tiandituKey"
/>
<!-- 天地图注记 -->
<vc-imagery-provider-tianditu
:api-key="tiandituKey"
:type="'cva'"
:token="tiandituKey"
/>
</vc-viewer>
</div>
</template>
<script setup>
import { ref } from 'vue'
const viewerRef = ref(null)
const tiandituKey = 'your_tianditu_api_key'
const onViewerReady = ({ viewer }) => {
// 配置相机
viewer.scene.camera.percentageChanged = 0.01
viewer.scene.camera.changed.addEventListener(() => {
// 相机移动回调
})
// 禁用默认交互
viewer.scene.screenSpaceCameraController.enableRotate = true
viewer.scene.screenSpaceCameraController.enableTilt = true
}
const onMapClick = (position) => {
// 处理地图点击
const cartesian = viewer.camera.pickEllipsoid(position)
const cartographic = Cesium.Cartographic.fromCartesian(cartesian)
const lng = Cesium.Math.toDegrees(cartographic.longitude)
const lat = Cesium.Math.toDegrees(cartographic.latitude)
// 添加航点逻辑...
}
</script>3.2.2 航点可视化
使用 Cesium Entity API 实现航点、航线、视锥的可视化:
javascript
// 添加航点标记
viewer.entities.add({
position: Cesium.Cartesian3.fromDegrees(lng, lat, height),
billboard: {
image: '/images/plane.png',
scale: 0.5,
rotation: Cesium.Math.toRadians(yaw), // 飞行器偏航角
heightReference: Cesium.HeightReference.CLAMP_TO_GROUND
}
})
// 添加航线路径
viewer.entities.add({
polyline: {
positions: positionArray,
width: 3,
material: new Cesium.PolylineGlowMaterialProperty({
glowPower: 0.2,
color: Cesium.Color.fromCssColorString('#3b82f6')
})
}
})
// 添加视锥体(相机视角范围)
import { FrustumVisualization } from '@/utils/FrustumVisualization'
const frustum = new FrustumVisualization(viewer)
frustum.update({
position: { lng, lat, height },
heading: gimbalYaw, // 云台偏航角
pitch: gimbalPitch, // 云台俯仰角
zoom: cameraZoom
})3.3 S 形扫描路径生成算法
面状航线的核心是自动生成 S 形扫描路径,算法流程如下:
javascript
// utils/routePlanner.js
/**
* 生成 S 形扫描路径
* @param {Array} polygon - 多边形顶点 [{lng, lat}, ...]
* @param {Object} options - 配置参数
* @returns {Array} - 航点列表
*/
export function generateScanPath(polygon, options) {
const {
scanSpacing = 20, // 扫描间距(米)
scanDirection = 0, // 航线方向(度)
borderShrink = 0, // 边界内缩(米)
overlapRate = 0.8 // 重叠率
} = options
// 1. 坐标投影:经纬度 -> 平面坐标(米)
const projectedPolygon = polygon.map(point =>
projectToPlane(point.lng, point.lat)
)
// 2. 多边形收缩(根据边距参数)
const shrunkPolygon = shrinkPolygon(projectedPolygon, borderShrink)
// 3. 坐标旋转(根据方向角)
const rotatedPolygon = rotatePolygon(shrunkPolygon, scanDirection)
// 4. 计算边界框
const bbox = calculateBoundingBox(rotatedPolygon)
// 5. 生成扫描线
const scanLines = []
for (let y = bbox.minY; y <= bbox.maxY; y += scanSpacing) {
const line = {
start: { x: bbox.minX, y },
end: { x: bbox.maxX, y }
}
scanLines.push(line)
}
// 6. 计算扫描线与多边形的交点
const intersections = scanLines.map(line =>
intersectLineWithPolygon(line, rotatedPolygon)
)
// 7. S 形连接交点
const waypoints = connectInSPattern(intersections)
// 8. 反向旋转,恢复原坐标系
const restoredWaypoints = waypoints.map(point =>
rotatePoint(point, -scanDirection)
)
// 9. 坐标还原:平面坐标 -> 经纬度
const result = restoredWaypoints.map(point => {
const { lng, lat } = projectFromPlane(point.x, point.y)
return { lng, lat, height: options.flightHeight }
})
return result
}
/**
* S 形连接交点
*/
function connectInSPattern(intersections) {
const waypoints = []
for (let i = 0; i < intersections.length; i++) {
const points = intersections[i]
// 偶数行:从左到右
if (i % 2 === 0) {
points.sort((a, b) => a.x - b.x)
}
// 奇数行:从右到左
else {
points.sort((a, b) => b.x - a.x)
}
waypoints.push(...points)
}
return waypoints
}算法关键点:
-
坐标投影:使用 Web Mercator 投影,将经纬度转换为平面坐标
-
多边形收缩:使用向量法向内收缩边界
-
扫描线生成:等间距平行线
-
交点计算:射线法判断交点
-
S 形连接:减少无人机转弯次数,提高效率
3.4 KMZ 文件生成
KMZ 文件是符合 DJI WPML 1.0.6 标准的压缩文件,包含:
-
wpmz/template.kml:任务配置 -
wpmz/waylines.wpml:航线定义
3.4.1 下载文件
javascript
<script setup>
import { KmzGenerator } from '@/utils/kmzGenerator'
const generateAndDownload = async () => {
const generator = new KmzGenerator()
const mission = {
droneEnumValue: 99, // Matrice 4T
payloadEnumValue: 85,
flightSpeed: 10,
flightHeight: 60,
takeoffHeight: 20,
finishAction: 1, // 返航
lostConnectionAction: 0, // 返航
heightMode: 'relative_to_takeoff',
polygon: routePoints.value
}
const waypoints = routePoints.value.map(point => ({
lng: point.lng,
lat: point.lat,
height: point.height,
speed: point.speed,
gimbalPitch: point.gimbalPitch,
gimbalYaw: point.gimbalYaw,
actionType: point.actionType,
fileName: point.fileName,
hoverTime: point.hoverTime
}))
const kmzBlob = await generator.generate(mission, waypoints)
// 触发下载
const url = URL.createObjectURL(kmzBlob)
const link = document.createElement('a')
link.href = url
link.download = 'mission.kmz'
link.click()
URL.revokeObjectURL(url)
}
</script>3.5 相机视角可视化
为了直观展示无人机的拍摄范围,我们实现了**视锥体(Frustum)**可视化:
javascript
// utils/FrustumVisualization.js
import * as Cesium from 'cesium'
export class FrustumVisualization {
constructor(viewer) {
this.viewer = viewer
this.entity = null
}
/**
* 更新视锥体
* @param {Object} config - 配置参数
*/
update(config) {
const {
position, // {lng, lat, height}
heading, // 云台偏航角(度)
pitch, // 云台俯仰角(度)
zoom // 变焦倍率
} = config
// 计算相机参数
const fov = this.calculateFov(zoom)
const aspectRatio = 4 / 3 // 4:3 画幅
// 计算视锥体角点
const corners = this.calculateFrustumCorners(
position,
heading,
pitch,
fov,
aspectRatio
)
// 更新或创建视锥体 Entity
if (this.entity) {
this.viewer.entities.remove(this.entity)
}
this.entity = this.viewer.entities.add({
// 视锥体线框
polylineVolume: {
positions: this.createFrustumOutline(corners),
shape: this.createCrossShape(),
material: Cesium.Color.fromCssColorString('#3b82f6').withAlpha(0.5),
cornerType: Cesium.CornerType.ROUNDED
},
// 地面投影
polygon: {
hierarchy: Cesium.Cartesian3.fromDegreesArray([
corners.bottomLeft.lng, corners.bottomLeft.lat,
corners.bottomRight.lng, corners.bottomRight.lat,
corners.topRight.lng, corners.topRight.lat,
corners.topLeft.lng, corners.topLeft.lat
]),
material: Cesium.Color.fromCssColorString('#3b82f6').withAlpha(0.2),
outline: true,
outlineColor: Cesium.Color.fromCssColorString('#3b82f6')
}
})
}
/**
* 计算视场角
*/
calculateFov(zoom) {
// 基准焦距(1x 变焦)
const baseFocalLength = 24 // mm
const sensorWidth = 13.2 // M3T 传感器宽度
// 当前焦距
const focalLength = baseFocalLength * zoom
// 视场角公式:FOV = 2 * arctan(sensorSize / (2 * focalLength))
const fovRadians = 2 * Math.atan(sensorWidth / (2 * focalLength))
return Cesium.Math.toDegrees(fovRadians)
}
/**
* 计算视锥体角点
*/
calculateFrustumCorners(position, heading, pitch, fov, aspectRatio) {
// 假设拍摄距离(根据高度和俯仰角估算)
const distance = position.height / Math.sin(Cesium.Math.toRadians(-pitch))
// 视锥体半角
const halfFov = fov / 2
const halfHeightFov = Math.atan(Math.tan(Cesium.Math.toRadians(halfFov)) / aspectRatio)
// 计算角点偏移
const corners = {
topLeft: this.offsetPosition(position, heading, pitch, -halfFov, halfHeightFov, distance),
topRight: this.offsetPosition(position, heading, pitch, halfFov, halfHeightFov, distance),
bottomLeft: this.offsetPosition(position, heading, pitch, -halfFov, -halfHeightFov, distance),
bottomRight: this.offsetPosition(position, heading, pitch, halfFov, -halfHeightFov, distance)
}
return corners
}
/**
* 偏移位置
*/
offsetPosition(position, heading, pitch, yawOffset, pitchOffset, distance) {
const finalHeading = Cesium.Math.toRadians(heading + yawOffset)
const finalPitch = Cesium.Math.toRadians(pitch + pitchOffset)
const dx = distance * Math.cos(finalPitch) * Math.sin(finalHeading)
const dy = distance * Math.cos(finalPitch) * Math.cos(finalHeading)
const dz = distance * Math.sin(finalPitch)
return {
lng: position.lng + Cesium.Math.toDegrees(dx / 6378137),
lat: position.lat + Cesium.Math.toDegrees(dy / 6378137),
height: position.height - dz
}
}
}四、性能优化
4.1 组件通信优化
使用 Vue 3 的 provide/inject 和响应式系统优化组件通信:
javascript
<!-- index.vue -->
<script setup>
import { provide, reactive, ref } from 'vue'
// 共享状态
const sharedState = reactive({
currentWaypointIndex: -1,
routePoints: [],
cameraConfig: {
zoom: 1,
aircraftYaw: 0,
gimbalPitch: -90,
gimbalYaw: 0
}
})
// 提供给子组件
provide('sharedState', sharedState)
provide('updateWaypoint', updateWaypoint)
provide('updateCameraConfig', updateCameraConfig)
function updateWaypoint(index, data) {
sharedState.routePoints[index] = {
...sharedState.routePoints[index],
...data
}
}
function updateCameraConfig(config) {
Object.assign(sharedState.cameraConfig, config)
}
</script>4.2 Cesium 渲染优化
javascript
// 1. 使用 Entity Pool 管理大量航点
class EntityPool {
constructor(viewer) {
this.viewer = viewer
this.pool = []
this.active = new Map()
}
acquire(id, config) {
if (this.active.has(id)) {
this.update(id, config)
return
}
let entity
if (this.pool.length > 0) {
entity = this.pool.pop()
this.configureEntity(entity, config)
} else {
entity = this.viewer.entities.add(config)
}
this.active.set(id, entity)
}
release(id) {
const entity = this.active.get(id)
if (entity) {
this.active.delete(id)
this.pool.push(entity)
}
}
}
// 2. 视锥体更新使用 nextTick 避免渲染警告
import { nextTick } from 'vue'
const updateFrustum = async () => {
await nextTick()
frustumVisualization.update(cameraConfig)
}
// 3. 限制最大缩放级别(避免地图无数据)
viewer.scene.screenSpaceCameraController.maximumZoomDistance = 200004.3 路径计算优化
使用 Web Worker 处理复杂计算,避免阻塞主线程:
javascript
// workers/pathPlanning.worker.js
self.onmessage = function(e) {
const { type, data } = e.data
if (type === 'GENERATE_SCAN_PATH') {
const waypoints = generateScanPath(data.polygon, data.options)
self.postMessage({ type: 'SCAN_PATH_READY', waypoints })
}
}
javascript
// 主线程使用
const worker = new Worker(new URL('./workers/pathPlanning.worker.js', import.meta.url))
worker.postMessage({
type: 'GENERATE_SCAN_PATH',
data: { polygon, options }
})
worker.onmessage = function(e) {
if (e.data.type === 'SCAN_PATH_READY') {
routePoints.value = e.data.waypoints
}
}五、难点与解决方案
5.1 AI 目标识别配置
问题:Matrice 4T 支持 AI 目标识别,需要特殊配置
解决方案:在 KMZ 中添加 AI 参数
5.2 高度模式处理
问题:三种高度模式(海拔、相对起飞点、相对地形)需要不同处理
六、总结与展望
6.1 技术亮点
-
坐标系统转换:完美解决 GCJ-02 和 WGS84 的偏移问题
-
3D 可视化:基于 Cesium 实现航点、航线、视锥的实时可视化
-
路径规划算法:S 形扫描路径自动生成,支持参数调节
-
KMZ 文件生成:符合 WPML 1.0.6 标准,兼容 DJI 设备
6.2 待完善功能
-
更多航线类型(带状、斜面、几何体)
-
3D 地形跟随
-
多机协同航线
-
实时天气集成
-
航线仿真模拟
6.3 性能优化方向
-
使用 WebAssembly 加速路径计算
-
增量式 KMZ 生成
-
离线地图支持
-
PWA 支持