我发现一个东西不经常用,老是忘
把觉得有用的相机和镜头知识搬运一下
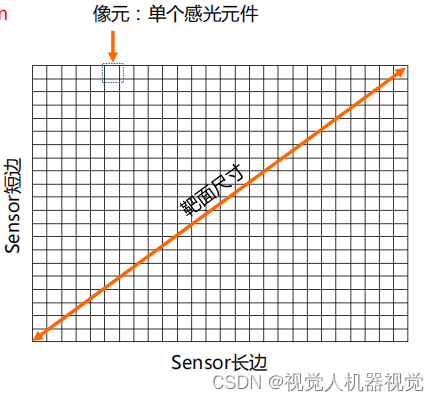
相机传感器:
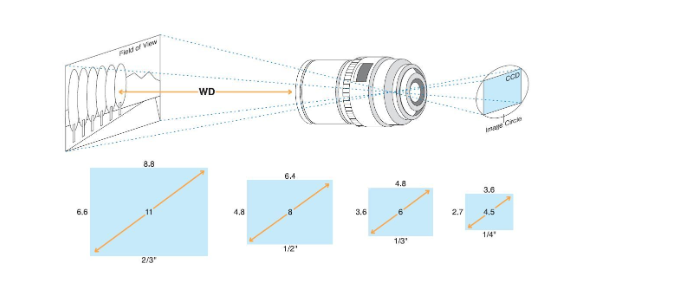
1、靶面尺寸:由Sensor对角线长度表示,单位英寸,这里的1英寸=16mm
2、像元尺寸:单个感光元件的大小,一般都是正方形,边长单位um
3、分辨率:Sensor长边像元数xSensor短边像元数,俗称像素。
三者的关系:
Sensor长边像素 x 像元大小 ÷ 1000=Sensor长边(mm)
Sensor短边像素 x 像元大小 ÷ 1000=Sensor短边(mm)
由长边和短边,即可算出靶面尺寸
示例:MV-CA050-10GM,像元3.45um,分辨率2448*2048,所以
Sensor长边:2448 x 3.45 ÷ 1000=8.4456mm
Sensor短边:2048 x 3.45 ÷ 1000=7.0656mm,勾股定理可得对角线长(即是靶面尺寸):
11.0114mm=2/3"
相机成像原理:
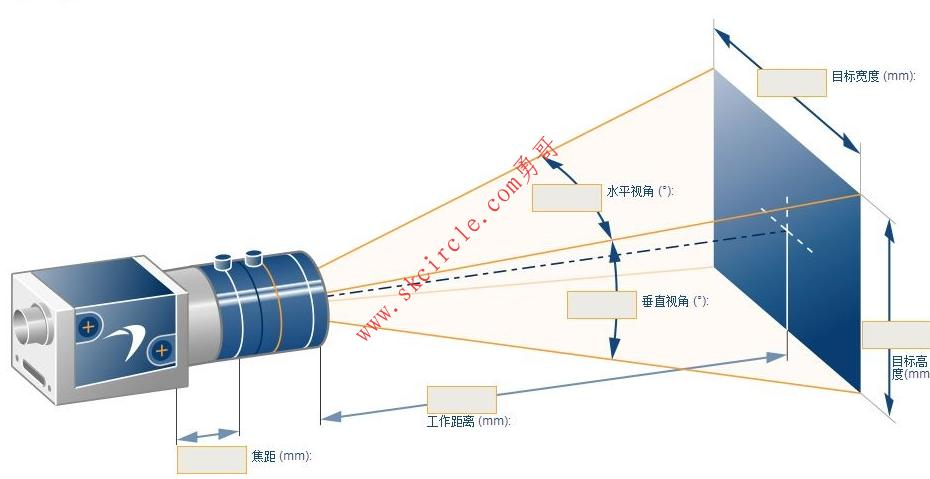
根据相似三角形原理:
光学放大倍率=传感器尺寸短边/视野短边=焦距/工作距离 =像元尺寸/精度
有些新人可能会在这里疑惑,光学放大倍率为什么是:传感器尺寸短边/视野短边,而不是:视野短边/传感器尺寸短边,产生这个疑问可能是因为潜意识觉得放大倍数是要>1的,上图中看起来明显视野短边比传感器尺寸短边更大。
这里举个例子,在实际应用中,在半导体行业中要抓取一个产品的Mark,视野往往很小,你看到的相机画面对应的视野往往是毫米*毫米级的,而CCD传感器尺寸要比这个相机画面大一点,并且,你看到的相机画面中每个像素,就是相机传感器上每个像元传递过来的,此时,像元和像素一一对应,而且这个像元尺寸就要比相机画面单个像素所对应的实际物理大小要大(相机画面单个像素所对应的实际物理大小 就是 精度)。
可以理解为:
视野的区域经过镜头放大到相机传感器上显示,所以放大倍数是:传感器尺寸短边/视野短边
一个像素对应的视野映射到一个感光元件上显示,所以放大倍数就是:感光元件的尺寸/一个像素对应的视野,也就是 :像元尺寸/精度
然后再来理解这段话:
以ORCA-Flash4.0为例,芯片的像元大小为 6.5 μm,在 40X物镜的放大倍率下,1 μm的物经光学系统放大为 40 μm的像,这样的像会由 40/6.5 = 6.15 个像素来显示,所以图像分辨率为 6.15 pixel/μm。反推回实际物体,则图像中的一个像素点表示的实际距离为 1/6.15 = 162 nm (其实就是像元尺寸/放大倍数)。
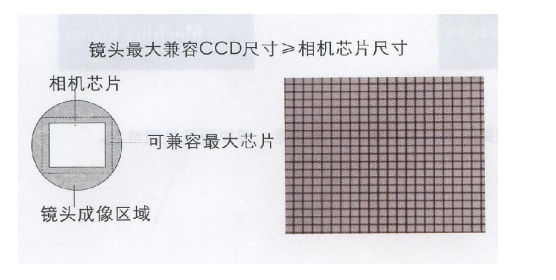
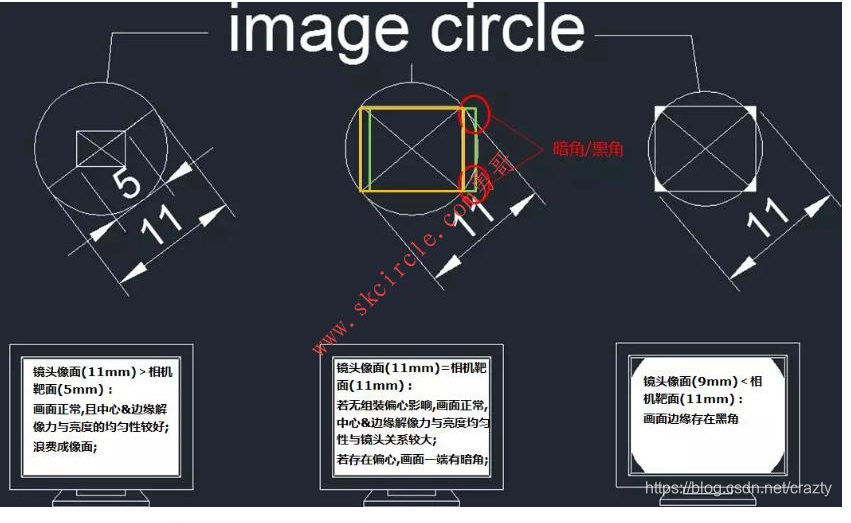
相机与镜头靶面关系
参考链接: