实现了腿部连杆长度自动优化、三维工作空间计算、运动学动画仿真,包括:
根据步幅S和抬腿高度Hf反推总腿长;
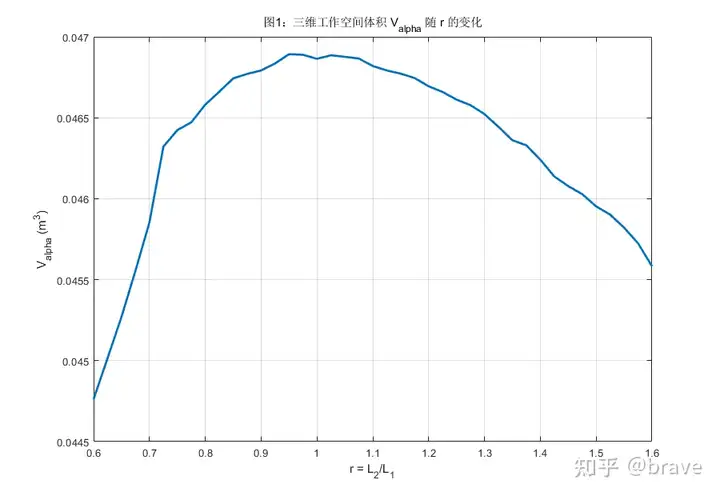
扫描连杆比例 r=L2/L1,找到工作空间体积最大的最优腿长分配;
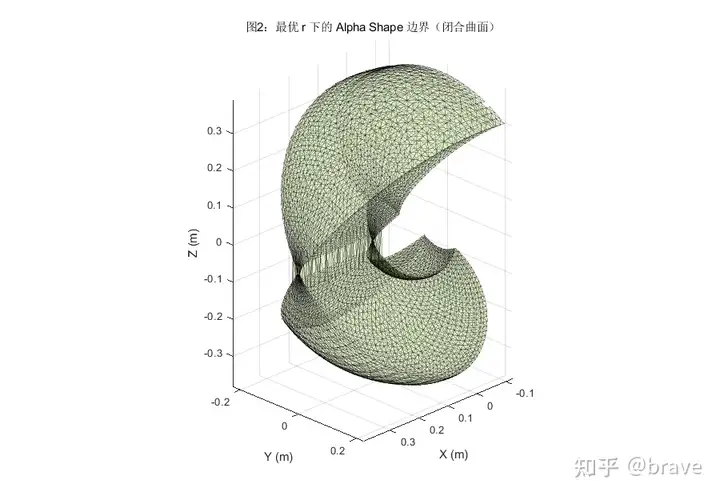
用 Alpha Shape 拟合三维可达空间;
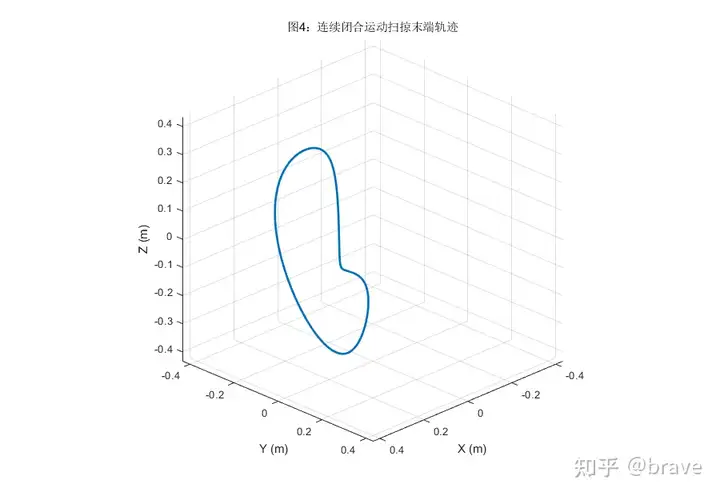
生成连续闭合轨迹动画,验证运动范围
1.总腿长设计公式
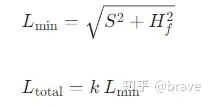
- S:最大水平步幅、Hf:最大抬腿高度、k:安全系数
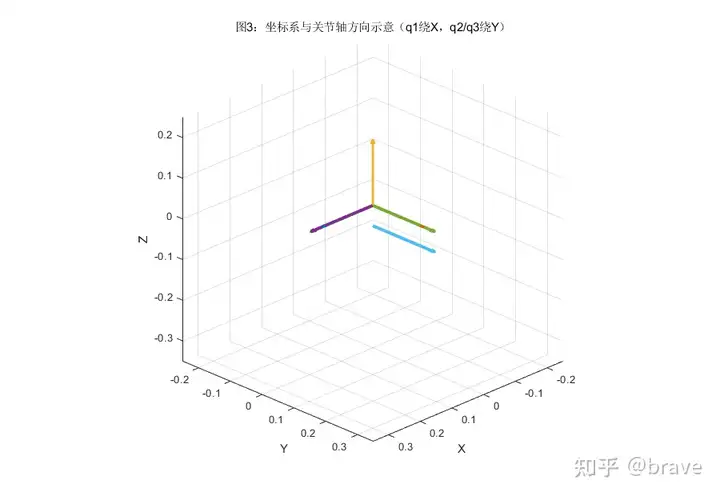
2.正运动学
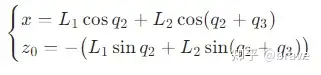
绕x转q1得到空间坐标:
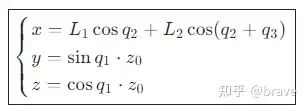
其中:

3.工作空间计算
遍历关节限位内所有角度,得到末端点云

使用 Alpha Shape 重构闭合曲面 ∂W,并计算可达空间体积:

4.连杆长度优化
以工作空间体积最大为目标,最优连杆比:
5.轨迹规划