
扫地机等轮式机器人一般都具有自动回充电桩充电的能力,需要机器人自己运动到充电桩,接触充电电极来进行充电。这就需要机器人能感知到充电桩和自己所处的位置,常见的回充定位方案有视觉定位、红外、激光雷达等。
视觉方案就是靠摄像头识别充电桩引导机器人回充,红外方案是靠充电桩发射红外信号,机器人接收红外信号来引导回充,激光雷达是靠扫描到充电桩的轮廓特征来识别充电桩并引导回充。这几种方案中,以红外回充最为常见,因为这种方式定位精度高,且成本低,无明显缺点。本文就从硬件到软件介绍一下红外回充的方案。
先看一下回充的效果视频。
红外引导自动回充
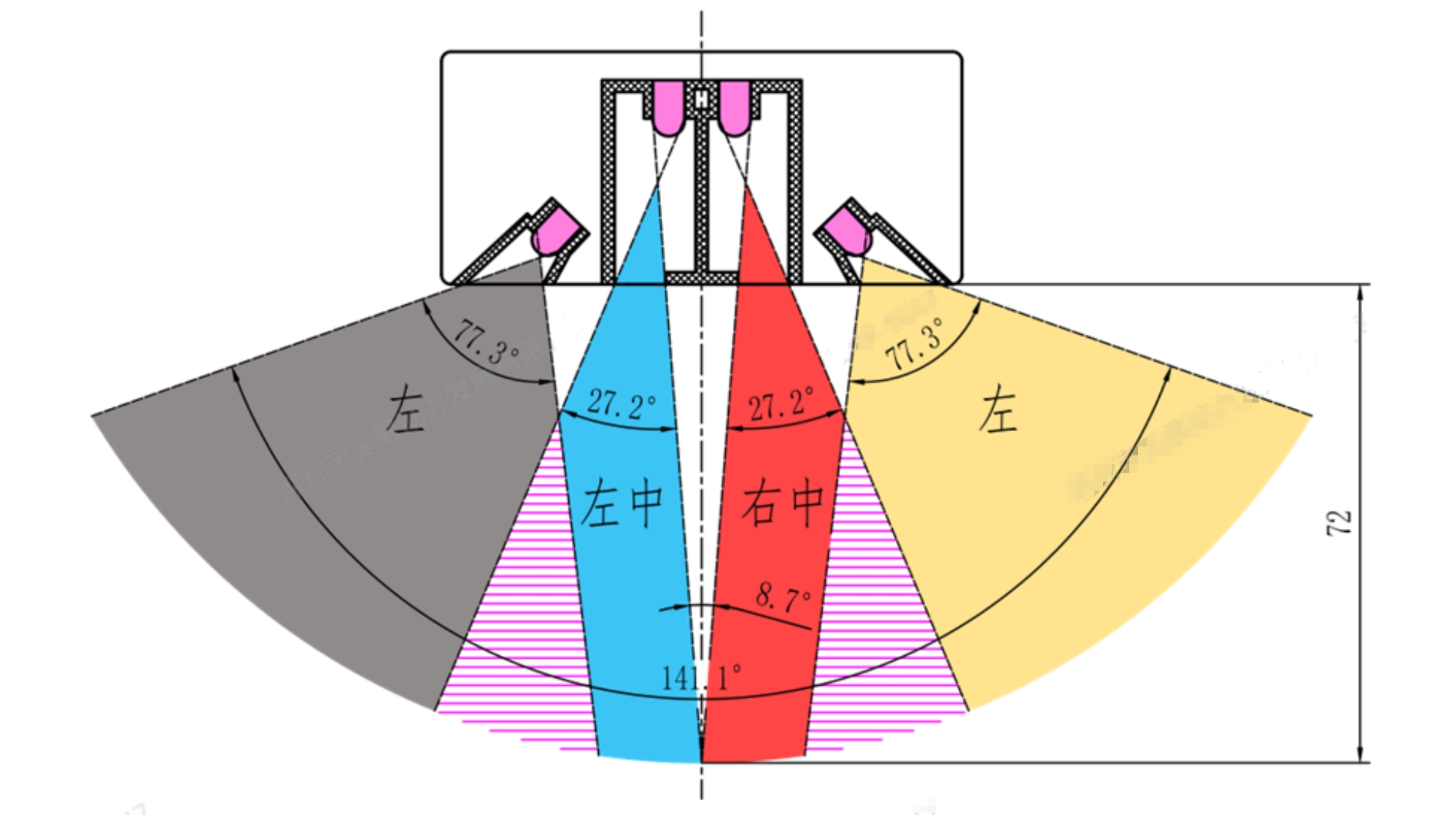
充电桩红外引导信号分布图
未完待续。。。