1.硬件准备:
如下图硬件上KUKA机器人需支持EtherCAT通讯:
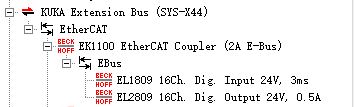
如下图SYS-X44接口有硬件支持方可进行外部IO配置,本硬件IO支持16位输入(I)和16位输出(O):


⒉WorkVisual软件映射配置
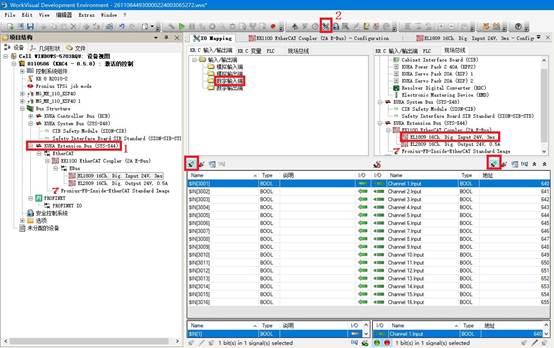
如图,基于KUKA软件如下图点击映射,即可完成通过外部IO实现外部机器人硬件接线实现控制,配置过程同其它配置映射方式一样,即输入信号对输入,输出信号对输出,本例已完成映射,对应关系如下。
输入信号映射:
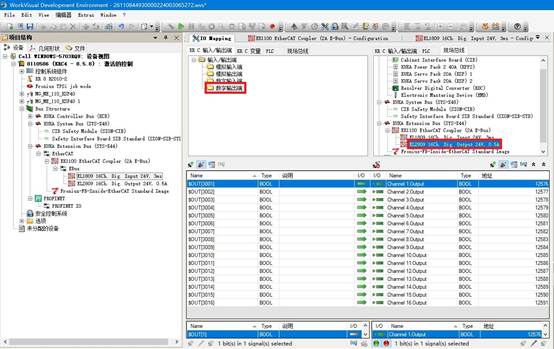
输出信号映射:
1.硬件准备:
如下图硬件上KUKA机器人需支持EtherCAT通讯:
如下图SYS-X44接口有硬件支持方可进行外部IO配置,本硬件IO支持16位输入(I)和16位输出(O):
⒉WorkVisual软件映射配置
如图,基于KUKA软件如下图点击映射,即可完成通过外部IO实现外部机器人硬件接线实现控制,配置过程同其它配置映射方式一样,即输入信号对输入,输出信号对输出,本例已完成映射,对应关系如下。
输入信号映射:
输出信号映射: