很久没写博客了。原来那种事无巨细地铺开技术细节的写法,现在看性价比已经不高了,如何有结构地和 AI 协作反而更重要。这篇就从个人视角回顾一个具体案例。
开始
25 年底机缘巧合需要使用 Unity,我在接近零基础的情况下借助 Coding Agent,快速迁移和扩展了已有知识,把一个角色绕圆柱世界移动的需求拆成了运动合成问题,并通过大量试验做 trade-off,解决了视角抖动和偏移。虽然项目本身只是个半成品,但随着对话轮数增加,工程量还是涨得很快。整个过程在几周内完成,这样的迭代速度让我意识到可以去探索一些更有意思的东西,于是我开始花时间了解机器人的运动学。
机械臂建模
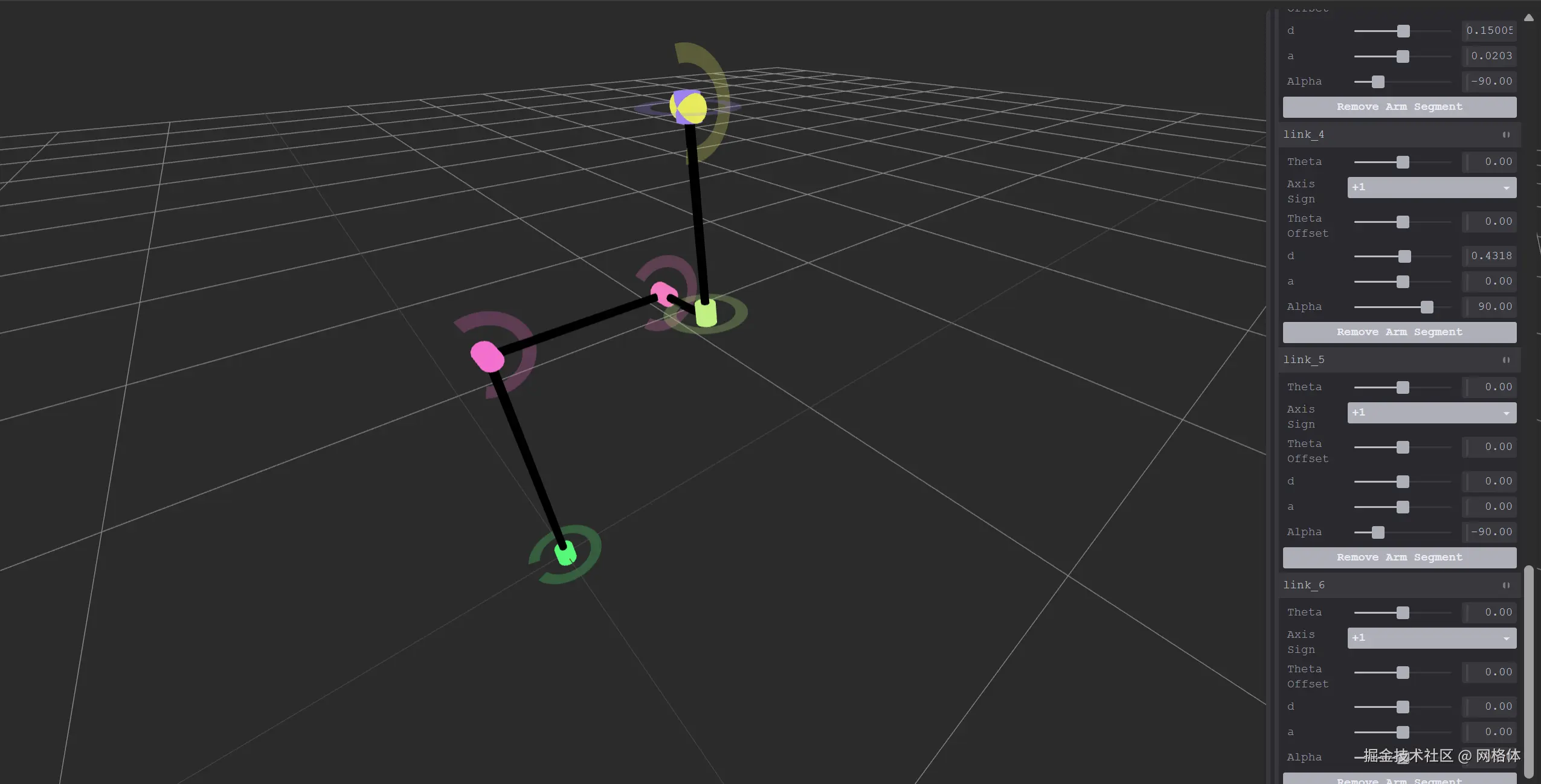
一开始最先遇到的问题是,机械臂该怎么定义。这个问题很快收敛到用 DH 参数和改进型 DH 参数(MDH)来描述机械结构。我原本以为这部分会很简单,无非是父子层级关系下的一套坐标系嵌套,但真正实现时还是踩了不少坑。后来通过几套结构反复试验、补上可视化 gizmo、再结合一些 AI 给出的改进方向,才把这部分逐渐理顺。这部分我单独整理到了 wwjll.github.io/three-chamb... ,希望对开始该领域学习的朋友有所帮助。
继续探索
这套东西本身已经很成熟了。我一开始就确定不想用 FABRIK、CCD 这类游戏里常见的巧解,也不想走基于几何关系推导的纯几何解析,因为一旦到了多轴机械臂,复杂度会迅速上升,而且不够通用。这样问题就明确了下来,需要引入 Jacobian matrix 来同时表达旋转和位移。问题到这里虽然变精确了,但也开始发散,因为我并不知道这些量在工程里到底一一对应什么。继续追问之后,AI 默认我已经有了相关背景,开始往工业解法和动力学方程上带。那时我的状态大概就是,"字都认识,意思不清楚"。
问题收敛
在继续扩展之前,我先把问题压到一个能实现的范围里。我想要的只是一个基于位移和旋转的简单可视化求解过程,用 JavaScript 跑在网页里,而不是把 Mujoco 一整套搬进来。于是我给自己定了一个边界:忽略电机参数、编码器噪声、动力学方程这些工业机械臂必须面对的内容,只保留 forward kinematics 和 inverse kinematics,用它们来定义 position error 和 orientation error。这样问题的复杂度就收敛到了一个我当时还能继续推进的层级。
问题定义
把问题压到最小以后,inverse kinematics 的目标就可以写得很直接。设机械臂当前 joint variables 为 q∈Rn,end effector 当前 pose 记为 x(q),目标 pose 记为 xd。要做的并不是一次性"解出答案",而是每一帧根据当前位置和目标位置之间的误差,算出一小步 joint increment Δq,让机械臂逐步逼近目标。
如果只看微分关系,这件事可以写成:
Δx≈J(q)Δq
其中 J(q) 是 Jacobian matrix,它描述了"每个关节动一点点,end effector 的 pose 会怎样变化"。于是 inverse kinematics 的核心就变成了:已知末端误差 e,求一个合适的 Δq,使得
J(q)Δq≈e
这里的 error vector 通常拆成 position error 和 orientation error 两部分:
e=eper∈R6
其中 position error 可以直接写成
ep=pd−p
orientation error 则不再直接拿 Euler angles 相减,而是更常见地转成 axis-angle 或 rotation vector 来表达。也就是说,我真正需要求解的不是"角度本身",而是一个能让当前姿态朝目标姿态旋过去的微小旋转量。
如果 J 恰好是方阵且可逆,形式上可以写成
Δq=J−1e
但这在真实问题里几乎不是常态。机械臂经常会遇到下面几种情况:
- 关节数和任务维度不一致, J 不是方阵
- 机械臂接近奇异位形, J 虽然看起来能逆,但数值会很不稳定
- 有些目标本来就不可能被当前结构精确到达,只能求一个最接近的解
所以工程里更常见的是用 pseudoinverse 来做 least-squares 意义下的求解:
Δq=J+e
其中 J+ 是 J 的 Moore-Penrose pseudoinverse。可以把它理解成:在所有可能的 joint increment 里,找一个尽量减小末端误差、同时又不过分夸张的解。工程上通常不会直接停在普通 pseudoinverse 这一步,还会继续引入更稳的形式,但这个项目先走到这里。
整个求解过程可以理解成一个迭代循环:
qk+1=qk+αΔqk
阶段实现
Finite Difference 验证
"每次沿一个很小的方向更新,然后重新计算误差",顺着这个思路,我先让 Codex 搭了一个只处理位置误差的 demo。它每轮扰动角度 ε,反复迭代求解。这个 demo 确实会慢慢向目标靠近,但速度很慢,收敛也不稳定。拆开来看,它做的是下面这件事:
首先,假设第 i 列 Jacobian 通过 forward finite difference 来近似,那么它通常写成
Ji≈εp(q+εei)−p(q)
其中 ei 是第 i 个关节对应的 basis vector。这个式子看起来只是一列一个小公式,但真正落到代码里,含义其实是:
- 先拿当前关节姿态 q
- 只扰动第 i 个关节一个很小的量 ε
- 重新做一次 forward kinematics,得到新的末端位置
- 和原来的末端位置做差
- 最后除以 ε
问题在于,Jacobian 不是只有一列,而是每个关节都要来一次。如果机械臂有 n 个关节,那么一轮迭代里大致要做:
- 1 次 forward kinematics,用来求当前误差
- n 次扰动后的 forward kinematics,用来拼出整个 Jacobian
也就是说,一轮迭代的成本大约就是
1+n
次 FK 级别的工作。
写成伪代码:
js
function solveStep(q, targetPosition, epsilon):
# 1. 当前姿态先做一次 FK,拿到当前位置和误差
p0 = forwardKinematics(q)
error = targetPosition - p0
# 2. 用数值差分构造 Jacobian
J = zeroMatrix(3, n)
for i in 0 .. n-1:
qPerturbed = copy(q)
qPerturbed[i] += epsilon
pi = forwardKinematics(qPerturbed)
Ji = (pi - p0) / epsilon
J.setColumn(i, Ji)
# 3. 解一个关节增量
dq = pseudoInverse(J) * error
# 4. 更新关节
qNext = q + alpha * dq
return qNext如果放到 three.js 这类基于节点树的实现里,这个"做一次 FK"往往不只是算几个三角函数,而是要把整条链条上的 local transform 重新传播到 world transform。换句话说,每求一列数值 Jacobian,基本都要重新触发一遍从关节到末端的 world matrix 更新。这也是为什么它在 demo 阶段还能跑,但一旦关节数增多、每帧迭代次数提高,性能就会很快掉下去。
如果这时再叠加一些工程上常见的策略,比如:
- 每轮失败后 retry
- 为了避免发散做 backtracking
- 对多个 candidate step 分别试算误差
那么每试一次候选步长,通常都还要重新评估一次误差,开销会继续往上叠。所以"差分法验证"很适合拿来确认思路,但并不适合作为后续稳定迭代的核心方案。
另外,finite difference 还有一个精度和稳定性上的两难。 ε 取大了,导数近似会变粗; ε 取小了,又容易受到浮点误差和姿态表示方式的影响,尤其是在旋转问题里更明显。它既慢,又不够稳,这也是我后来必须继续往 analytic Jacobian 方向走的原因。
Analytic Jacobian 梯度下降
对第 i 个转动关节,记:
- joint position 为 pi
- joint axis direction 为 ai
- 末端位置为 p
则 Jacobian 的 linear velocity 部分为:
Jv,i=ai×(p−pi)
angular velocity 部分为:
Jω,i=ai
所以第 i 列 Jacobian 写成:
Ji=Jv,iJω,i=ai×(p−pi)ai
写成伪代码,会更容易看出为什么它比 finite difference 便宜:
js
function solveStepAnalytic(q, targetPosition):
# 1. 先做一次 FK,拿到整条链的世界坐标信息
updateWorldTransforms(q)
pEnd = getEndEffectorPosition()
error = targetPosition - pEnd
# 2. 直接用关节轴和末端位置构造 Jacobian
J = zeroMatrix(3, n)
for i in 0 .. n-1:
pJoint = getJointWorldPosition(i)
axis = getJointWorldAxis(i)
Ji = cross(axis, pEnd - pJoint)
J.setColumn(i, Ji)
# 3. 解一个关节增量
dq = pseudoInverse(J) * error
# 4. 更新关节
qNext = q + alpha * dq
return qNext这里的 qNext 表示这一轮更新之后的新 joint state,也就是把当前 joint variables q 沿着本轮算出来的 increment Δq 推进一步:
qk+1=qk+αΔqk
finite difference 和 analytic Jacobian 最大的区别,不在最后那一步更新公式,而在 Jacobian 的构造方式:
- finite difference 是"每扰动一个关节,就重新做一次 FK,再拿结果做差"
- analytic Jacobian 是"先做一次 FK,拿到所有关节的 world position 和 axis direction,再直接算出每一列"
所以每轮迭代的开销大致分别是:
数值差分:
1+n 次 FK
analytic Jacobian:
1 次 FK+O(n) 个向量运算
前者把大部分时间花在重复刷新整条链的 world transform,后者则把这部分工作压缩到一次,然后只做叉乘、减法和矩阵拼装。对于 three.js 这种场景,这个差距会很直接地反映在每帧迭代次数和交互流畅度上。
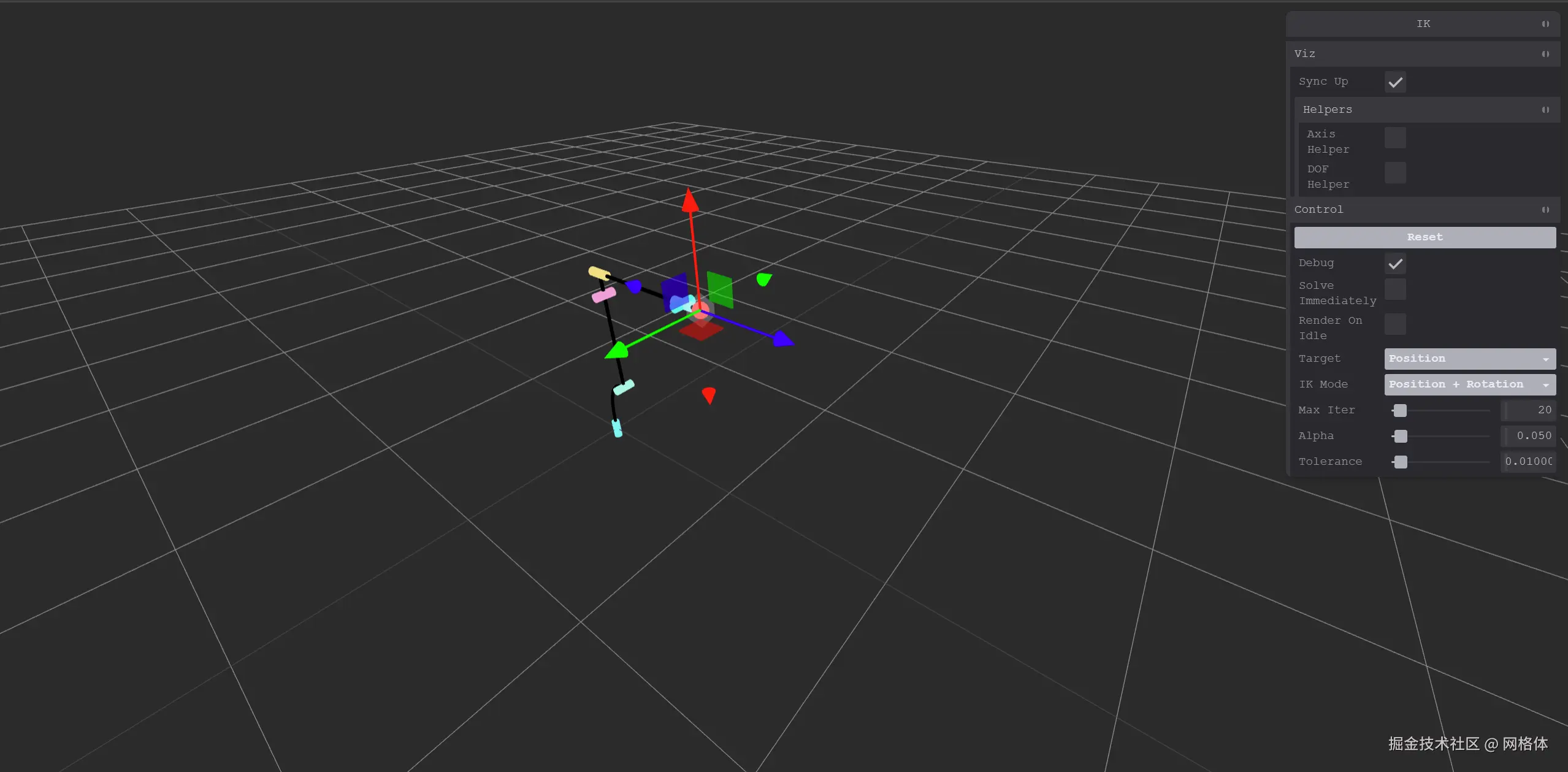
到这里,这个简单的算法已经能比较流畅地工作了。点击实验 wwjll.github.io/three-chamb...
加入 Physics Engine
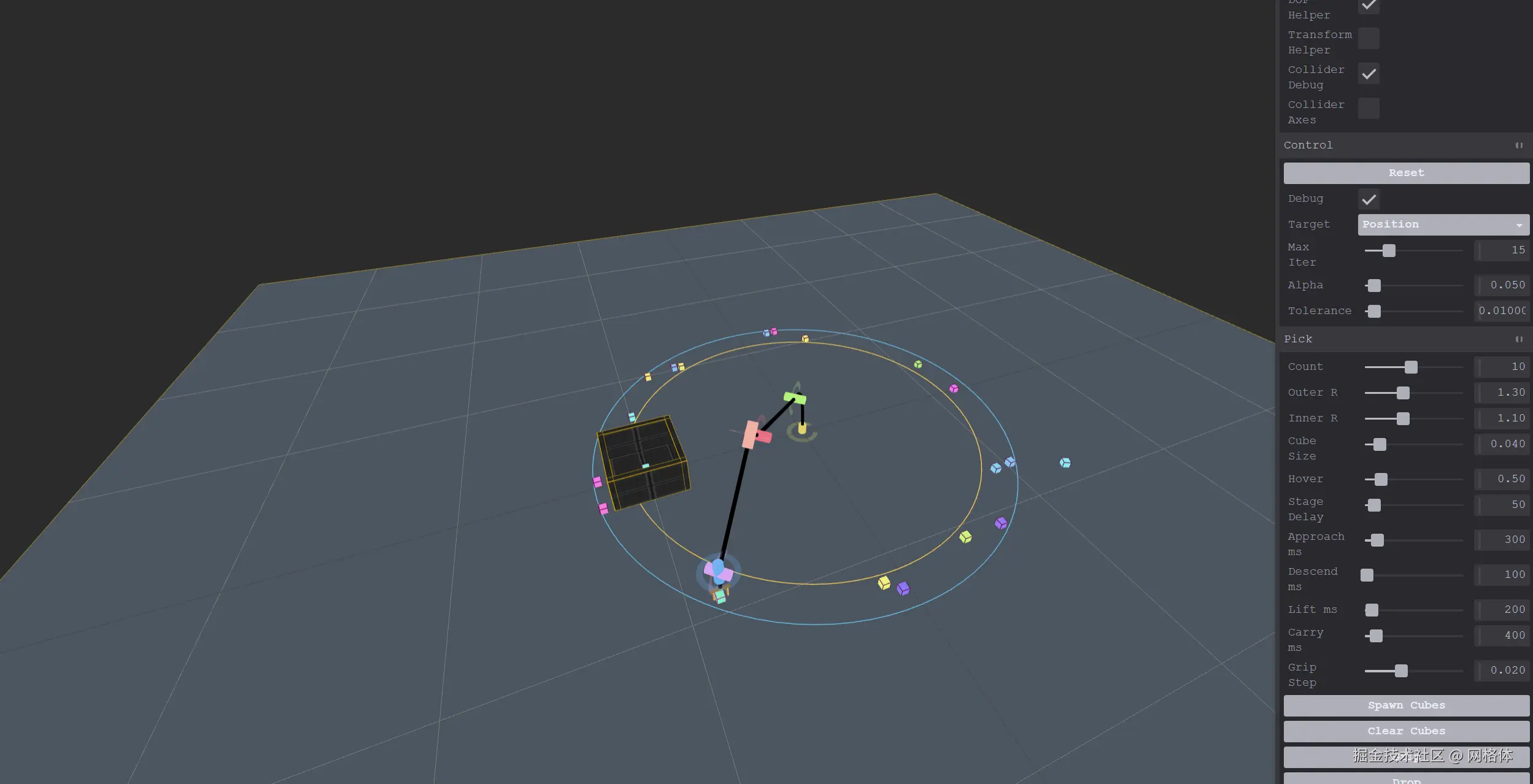
后来发现官方在用 rapier 这个相对轻量的 physics engine,于是我也把它引了进来,设计了一个带滑轨的夹爪,并把各个部分做了一定程度的解耦。动画过程也被拆成几个阶段:夹爪下降、夹取、抬升、移动到目标位、释放。
为了保证渲染性能,我把整个仓库里的例子都改成了 lazy rendering,也就是只有显式触发 render request 时才会真正渲染,性能提升很明显。
但 physics engine 和 grasp flow 一旦加进来,复杂度也立刻上去了,state control 多了很多。为了让过程更可控,又补了不少设定:
- 预设了 end effector 垂直向下的 zero pose
- 抓取过程的 physics contact state 解除
- 增加了 joint limits,限位外的无法到达
- 增加了 axis sign 来方便控制不同关节旋转正负号
- position、quaternion pose 的插值
- 可视化调节 controls
这部分可以在 wwjll.github.io/three-chamb... 里实验,需要先点击 "spawn cubes" 生成拾取方块。
最后的感受是,复杂度上来之后,真正关键的不是多写几轮代码,而是先把整体结构想清楚。遇到未知步骤时要停下来,重新拆解和设计,而不是顺着惯性往下堆实现。和 AI 协作也是一样,前提仍然是自己对问题边界、模块关系和验证方式有基本判断。