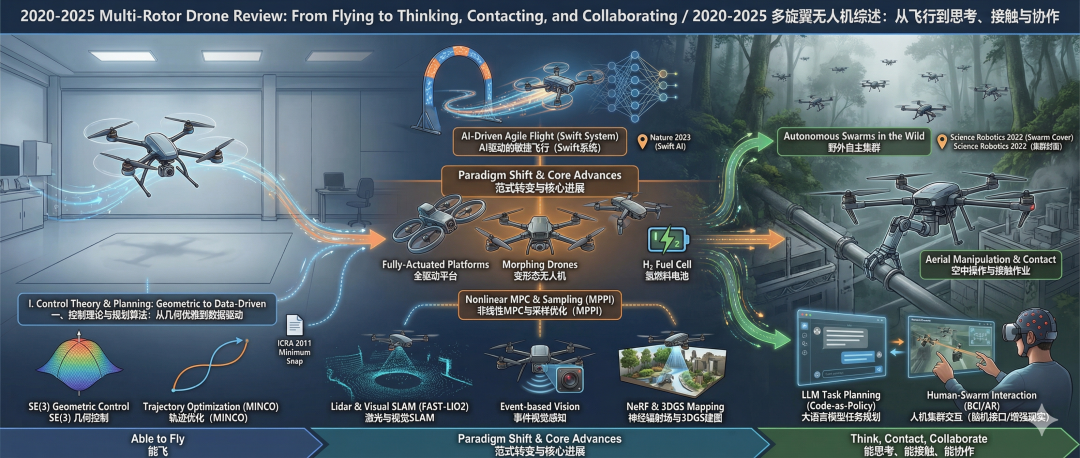

引言:新型空中机器人(NTARs)与具身智能的范式转换
无人机系统的发展轨迹已经发生了根本性的转变,正在从传统的、依赖远程遥控的飞行器,迅速演进为高度自主化、智能化的飞行机器人。这种演进在学术界和工业界被定义为"新型空中机器人"(New Types of Aerial Robots, NTARs)的崛起。与传统空中平台相比,NTARs具备四个核心的区分特征:形态可变性(Morphability)、仿生学设计(Biomimicry)、多模态运动能力(Multi-modal locomotion)以及机械臂附件的集成(Manipulator attachment)1。这一范式的转换标志着机器人学作为一个交叉学科,正在工程学、计算机科学以及认知科学的交汇处重塑其技术边界2。
在此次技术革命中,最具决定性的催化剂是具身人工智能(Embodied AI)及物理人工智能(Physical AI)的深度整合3。随着生成式人工智能的进步,芯片制造商和机器人研发机构正致力于创造物理人工智能的"ChatGPT时刻",即允许机器人在虚拟仿真环境中自我训练,并通过实际物理经验进行自主操作,而非仅仅依赖预设程序的硬编码4。这种将空中机器人技术与智能代理(Agentic AI)相融合的趋势,赋予了无人系统在复杂、动态和未知的环境中进行自主规划、推理和情境感知决策的能力5。
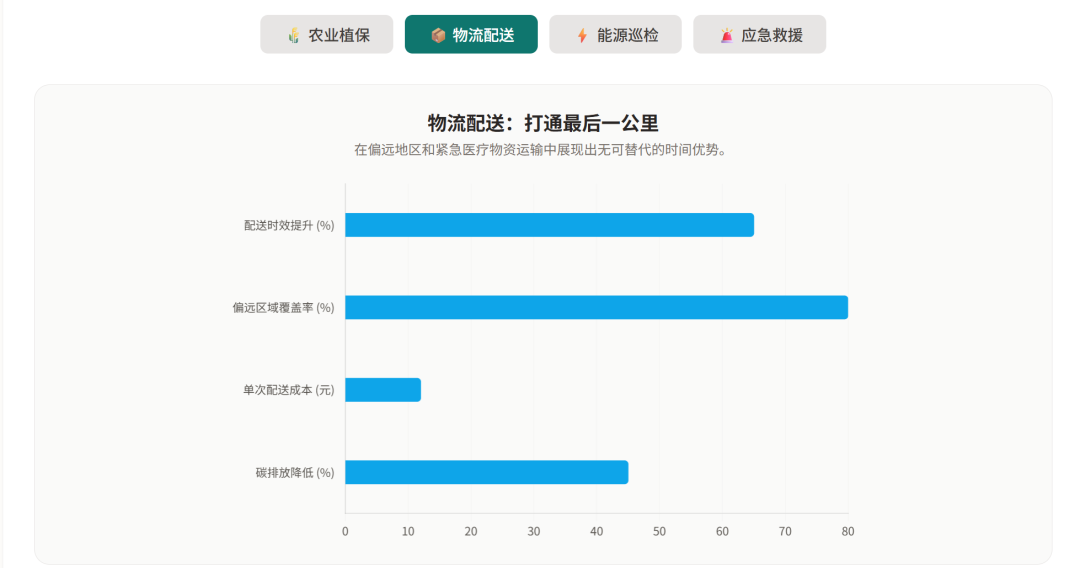
这种向"绝对自主"迈进的迫切性并非仅仅源于技术层面的好奇心,而是深刻植根于商业、民用以及国防领域的实际需求。从精准农业中的数据驱动管理、现代物流中的超视距配送,到深空探测中的地外生命寻迹,智能飞行机器人的应用边界正在呈指数级扩张1。然而,要实现真正意义上的自主飞行,学术界与工业界必须克服一系列深层次的工程壁垒,包括多模态感知、边缘计算能力、高能量密度储能系统、群体协同的复杂性以及国际空域监管架构的重塑1。本报告将基于2024至2026年间的最新研究成果,全面剖析智能飞行机器人在各个维度的演进路径、底层机制以及未来的战略发展趋势。
核心控制架构:从云端协同到边缘计算与绝对自主
边缘计算与去中心化决策系统的崛起
在过去十余年中,无人机智能的主要控制架构严重依赖于云端辅助计算。传感器捕捉的遥测与视觉数据被实时传输至地面站或云端平台,利用庞大的算力进行模式识别与决策支持8。然而,这种架构在现代动态且充满对抗性的环境中暴露出致命的脆弱性。当面临带宽受限、高延迟任务或强烈的电子战(EW)干扰时,依赖持续数据链路的无人机会瞬间丧失作战或作业能力8。
因此,当下的核心研究趋势是迅速向边缘计算(Edge Computing)和嵌入式人工智能(Embedded AI)迁移8。紧凑且功耗极低的AI加速器(如能够完全离线运行超大模型的便携式计算单元)正被直接集成到无人机机载系统中8。这种本地化的处理能力是实现"真正AI自主"(True AI Autonomy)的基础先决条件。所谓"真正AI自主",是指机器能够在没有GPS定位、缺乏外部数据链路以及无人类监督的受限环境中,独立完成感知、决策和行动闭环10。欧美防务与科研机构已经明确指出,若不摒弃将"远程控制"与"智能独立"混为一谈的传统观念,下一代飞行系统将在复杂的电磁对抗环境中全面崩溃10。
视觉引导与模型预测控制的深度融合
为了在无GPS环境中实现这种自主性,研究人员正在部署极其先进的基于学习的控制框架。例如,针对果园等复杂农业环境的导航挑战,最新的研究引入了基于变分自编码器(Variational Autoencoder, VAE)的控制器11。该架构通过干预式模仿学习(Intervention-based learning framework)进行训练,允许无人机直接从人类驾驶经验中学习视觉运动策略(Visuomotor policy)11。仅需少量的迭代训练,这种基于VAE的控制器便能仅依靠前置摄像头的视频流,在未知的、充满动态障碍物的环境中实现完全自主的避障飞行,并展现出极强的环境泛化能力11。
在动态避障领域,传统的反应式控制算法已无法满足高速飞行的需求。最新的前沿方法是将单次多模态运动预测(One-shot multimodal motion prediction)与模型预测控制(Model Predictive Control, MPC)深度融合12。研究团队利用基于能量的神经网络(Energy-based neural network),在单一操作中生成高分辨率的多步运动预测12。该算法采用无监督学习方式,按空间接近度对预测到的动态障碍物进行分组,并将其转化为数学几何约束12。这种主动式动态避障设计的数学本质是在预测时域内求解一个滚动优化问题,其目标函数不仅最小化轨迹跟踪误差与控制能量消耗,更对侵入动态障碍物预测边界的系统状态施加惩罚函数。通过整合高斯过程(Gaussian Process)与模型预测路径积分(MPPI)控制,即便在高度非结构化、充满杂物的室内环境中,飞行机器人也能实时生成平滑且绝对安全的导航轨迹13。
神经形态感知与低延迟仿生决策网络
在微型飞行器(MAVs)严格的体积、重量和功耗(SWaP)预算下,处理高分辨率的传统逐帧视频流以进行实时避障往往面临巨大的计算瓶颈。为了打破传统冯·诺依曼架构与帧级相机的限制,空中机器人感知的最前沿已转向神经形态工程(Neuromorphic Engineering)15。
动态视觉传感器(DVS)与异步感知
受生物视觉系统的启发,神经形态动态视觉传感器(即事件相机,Event Cameras)并不捕捉绝对强度的图像帧,而是异步地检测像素级光强度的对数变化15。这种异步操作机制赋予了事件相机微秒级的超低延迟、极高的动态范围以及对高速运动模糊的完全免疫力,使其在光照急剧变化或极端低光照的高速飞行场景中展现出无可比拟的优势15。例如,苏黎世联邦理工学院(ETH Zurich)机器人与感知团队提出的生成式事件预训练(Generative Event Pretraining, GEP)框架,通过联合回归对比目标将事件编码器与冻结的视觉基础模型(VFM)对齐,使事件数据直接继承了互联网规模图像数据集中的语义知识16。此外,空间稀疏线性注意力机制的引入,解决了异步网络在目标检测中的训练与计算瓶颈,实现了事件驱动视角的极低延迟对象识别与深度估计16。
脉冲神经网络(SNN)与Loihi 2芯片的物理应用
为了高效处理这些事件驱动的异步信号,研究人员广泛采用脉冲神经网络(Spiking Neural Networks, SNNs),并将其部署在专用的神经形态硬件上,如英特尔(Intel)的Loihi 2处理器15。Loihi 2芯片通过其内部的可编程流水线,极大地扩展了神经元模型的适用范围,并对异步电路进行了全面重新设计17。与上一代相比,Loihi 2支持低至200纳秒的芯片级最小时间步长,其处理神经形态网络的速度比真实生物神经元快5000倍17。
在具体的物理模拟与控制任务中,神经形态计算的能效优势呈指数级放大。桑迪亚国家实验室(Sandia National Laboratories)的研究表明,将整个生物神经网络连接组映射到12个Loihi 2芯片上,其运行速度比传统硬件上的数值模拟快100倍以上,特别是在稀疏活动网络中,这种性能优势更为显著18。在国防与无人系统应用中,相较于需要200至400瓦功率的传统GPU,Loihi 2或BrainChip的Akida等芯片能够以极小部分的能量成本实现实时的威胁检测与分类,这对于缺乏稳定通信、GPS受限且电池容量有限的无人机集群而言,具有颠覆性的战略价值19。
此外,将无监督学习下的事件相机目标检测,与轻量级的、对能量敏感的物理引导神经网络(Physics-guided Neural Network, PgNN)相结合,构成了最新的神经符号(Neuro-symbolic)闭环控制系统15。这种架构将物理系统级的先验知识通过模型方程嵌入神经网络中,不仅提高了决策的鲁棒性和符号可解释性,还能预测最佳飞行时间,从而在复杂的动态障碍物(如移动的门或无人机竞速赛道)间生成接近最小能量消耗的飞行路径15。
群体智能与多智能体强化学习的协同进化
随着空中机器人应用规模的扩大,部署多无人机(Multi-UAV)协同系统已成为必然趋势。然而,传统的集中式控制技术在动态、不确定或大规模环境中面临着通信瓶颈、单点故障及计算延迟等严重局限。因此,去中心化的决策机制与多智能体系统(Multi-Agent Systems, MAS)结合群体智能(Swarm Intelligence, SI)成为当下的主流研究范式9。
行为动力学与去中心化协调
最新的分布式协调框架主要依赖简单的局部行为规则------即分离(Separation)、对齐(Alignment)和凝聚(Cohesion),使无人机在没有中央服务器控制的情况下自发地进行协作20。通过结合多智能体强化学习(Multi-Agent Reinforcement Learning, MARL),无人机能够通过与环境及其他代理的持续交互,自主学习并优化集体行为策略9。例如,Boids-PE模型将Boids的自然群体行为动力学与深度强化学习相融合,显著提升了无人机集群在目标追踪、路径规划、动态避障及队形稳定性方面的表现21。同样,受蚁群算法(Ant Colony Algorithm)启发的研究已被成功整合到A-Star路径规划中,优化了长距离物流配送和监控任务中的任务分配效率21。
在针对高密度集群的模拟与实地测试中,这些去中心化模型展现了惊人的容错性。测试数据表明,在防碰撞测试中,系统能在10秒内将高密度集群的碰撞事故降至零;在目标收敛任务中,超过80%的无人机能在12至18秒内抵达目标;即使在面临GPS漂移、单个智能体损毁或通信突然中断的极端压力测试下,整个集群也能在不到7秒的时间内完成自我修复与重新拓扑20。
人工智能集群的国际法与伦理问责
然而,高度自主的群体智能系统的部署,带来了深远的第二和第三阶伦理及法律连锁反应。人工智能驱动的无人机蜂群具有高度的作战不可预测性和自适应决策能力,这极大地挑战了现有的国际法问责框架22。当国家将军事或安保功能外包给私营军事和安保公司(PMSCs)时,由这些公司部署的AI蜂群技术会导致严重的"责任鸿沟"22。
法律学者指出,问题的核心不在于PMSCs模糊了个人与国家之间的责任界限,而在于国际法如何将一个本质上具备自主学习与突发行为能力的系统的后果归责于具体的人类操作员22。这种不可预测性可能会在不经意间降低使用武力的门槛,模糊武装冲突爆发的起点22。因此,未来的国际法体系必须发生范式转移,即从"事后惩罚的个人责任机制",转向强调"预防性的国家义务"。这种转变要求各个国家必须基于《第一附加议定书》(Additional Protocol I)第36条,执行标准化、极其严苛的合法武器审查,并重新评估在面对自主武器系统时"责任"一词的法理学定义22。
形态学创新:微型仿生、跨介质与智能自修复结构
NTARs在形态多样性方面实现了跨越式发展,彻底摆脱了传统多旋翼和固定翼的僵化设计。仿生学与先进材料科学的结合,正在催生能够在最苛刻环境中运行的柔性及微型机器飞行器。
亚克级微型飞行器与主动变体机翼
在极端微型化领域,加州大学伯克利分校(UC Berkeley)在2025年研发了世界上最小的无线控制飞行机器人23。这款受昆虫启发的飞行器直径不到1厘米,重量仅为21毫克。为了克服传统微型无人机无法同时搭载电池和飞行控制电路的物理极限,该机器人采用了纯磁驱动设计。它呈微型螺旋桨状,内部嵌有两块微小磁铁。当暴露在外部交变磁场中时,磁铁相互吸引和排斥,驱动螺旋桨以极高转速旋转从而产生升力。通过精确调制外部磁场,该机器人能够像蜜蜂一样悬停、改变轨迹并精确击中目标,为隐蔽的微观环境监测甚至人工授粉提供了无限可能23。与此同时,中国国防科技大学(NUDT)开发的微型仿生机器蚊子,体长仅2厘米、重不到0.3克,不仅能无声潜入狭窄缝隙,更因其超小体积而实现了物理意义上的"雷达隐身"24。
在稍大尺度的仿生飞行器中,研究人员正系统性地优化双曲柄双摇杆扑翼驱动机构的设计(如展弦比设定为1.11,平均弦长0.115米的仿生蝴蝶)25。更为关键的是,未来的智能飞行机器人将广泛配备"主动变体机翼"(Active-morphing wings)26。与传统的机械铰链不同,下一代变体机翼采用形状记忆金属合金(Shape-memory metal alloys)和其他智能超材料(Metamaterials)构建。这些材料在接收到热、电或磁刺激时,能够以极大的力量"恢复"到经过训练的初始物理形状,从而使机翼能够在飞行过程中根据流体动力学条件实时重塑空气动力学轮廓,大幅提升飞行的能量效率和机动性27。
跨介质多自由度平台与柔性自修复材料
空中机器人的另一个核心演进方向是跨越物理介质的界限。北京航空航天大学的研究团队开发了一种基于矢量推力的6自由度(6-DOF)全驱动空海两栖跨介质机器人29。该系统通过解耦控制架构,使其既能在空中实现六自由度悬停,又能在水下进行精准的三维空间运动。在NOKOV等高精度动作捕捉系统的验证下,该机器人不仅展示了完全自主的跨介质(入水与出水)过渡能力,还能在空中及水下的倾斜表面上部署跨介质传感器29。这种技术突破在海上风电检测、跨域目标追踪及两栖搜救中具有不可估量的战略价值。
此外,为了应对无人机在复杂交互中极易受损的薄弱环节,材料科学正在向具有自愈合和多重响应编程能力的材料迈进31。例如,研究人员开发了一种新型的聚硼硅氧烷-Ecoflex混合聚合物(Polyborosiloxane-Ecoflex hybrid polymer, PEHP)32。这种自愈材料利用氢键结合、热可逆反应、离聚体材料相互作用以及分子纠缠等物理化学机制,能够在遭受穿刺或撕裂等外部损伤后,自主恢复其原始的机械性能,而无需任何人工干预32。当这种自愈材料与预应力可逆机制(PSRM)相结合时,能够制造出在无需外部持续气压输入下即可抓取多种物体的仿生软体夹爪。这种柔性末端执行器彻底解决了气动夹爪在长时间作业中的漏气与撕裂问题,使空中机器人在进行空中建筑施工、墙面喷涂或物资装卸等物理交互任务时,具备了前所未有的耐用性32。
动力与能量系统:突破续航极限的下一代架构
现代智能飞行机器人的作业边界从根本上受制于其搭载的能量密度。传统的锂离子电池系统通常只能提供15至45分钟的有效飞行时间,这与大规模、高强度以及需要长时间滞空的复杂任务需求产生了极大的矛盾7。为此,全球研究的焦点已全面转向高能量密度的下一代动力架构。
固态电池与氢燃料电池技术
固态电池技术被视为超越传统液态锂电池的关键跳板。通过使用固态电解质,固态电池不仅彻底消除了热失控引发的火灾风险,还显著提升了能量密度。根据美国能源部(DOE)Battery 500联盟在2024年的报告,最新的固态电池已经验证了超过400 Wh/kg的能量密度阈值36。此外,与需要辅助系统从而将整体效率拉低至50%-60%的燃料电池相比,固态电池的能量转换效率超过90%,极大地减少了飞行器在进行高推重比机动时的能量损耗36。尽管如此,即使达到400 Wh/kg,固定翼无人机的连续续航时间也仅能提升至20小时左右,仍难以满足不间断作战或洲际监测的严苛要求36。
在延长滞空时间方面,氢燃料电池(Hydrogen Fuel Cell)展现出了极为广阔的商业前景。无人机专用的质子交换膜(PEM)燃料电池系统体积紧凑,通过将氢气转化为电能,实现了极高的续航延长且仅排放水37。市场数据显示,全球无人机氢燃料电池系统市场正以25.0%的复合年增长率(CAGR)迅速扩张,预计到2032年将达到26.51亿美元的规模38。
然而,传统高压气态或深冷液态的储氢方式伴随着极大的安全风险、低效性和后勤认证负担35。为打破这一瓶颈,科研企业(如H2MOF)正在开发革命性的固态储氢技术。该技术利用高度多孔的金属有机框架(Metal-Organic Frameworks, MOFs)在分子层面上吸附和捕获氢原子,从而在更低的操作压力下实现极其安全且高效的能量存储35。
为了实现能源管理效能的最大化,学术界正在开发联合能量-任务规划的能量管理策略(Energy Management Strategy, EMS)7。这些策略不再将EMS视为一个独立的控制模块,而是将其与多目标协同优化相结合,根据风场、海拔和任务负荷动态调度电力7。更为激进的研究甚至提出了一种名为动态大气能量收集(Dynamic Atmospheric Energy Harvesting, DAEH)的概念,旨在通过直接从大气环境中提取热能或动能,为战略级UAV提供近乎永久的续航动力36。
|-------------|--------------------------------|---------------------------|------------------------------|
| 能量与推进架构 | 核心技术优势 | 主要应用局限与瓶颈 | 典型适配场景 |
| 传统锂离子电池 | 商业成熟度极高,制造成本低廉,充放电倍率优秀 | 能量密度触顶,续航短(15-45分钟),热失控风险 | 消费级航拍、短期区域巡检、室内导航验证 |
| 高密度固态电池 | 能量密度突破400 Wh/kg,能量效率>90%,高安全性 | 规模化量产工艺复杂,极端温度下的界面阻抗问题 | 战术侦察、城市空中交通(UAM)、高速察打一体 |
| PEM氢燃料电池 | 快速加注能力,能量转换无污染,大幅提升载重续航比 | 高压储氢存安全隐患,固态MOF储氢仍需认证与商业化 | 大面积农业喷洒、重载物流、长航时边界巡逻 |
| 同位素热电机(核动力) | 绝对不受天气与光照影响,持续数年的稳定电力输出 | 辐射防护导致重量激增,极高的政治及发射合规门槛 | 深空地外探测(如土卫六Dragonfly项目)、深海航行 |
极端环境导航与高价值场景的商业化应用
智能飞行机器人的最终价值体现在其能够在人类难以涉足、环境极其恶劣的极端条件下进行自主作业的能力。
复杂地形的纯视觉自主探索
在密集的针叶林(Boreal Forests)或地下石灰岩矿井等环境中,无人机面临着全球导航卫星系统(GNSS/GPS)信号彻底丢失、光照极度不稳定以及密集微小障碍物的严峻考验39。在森林导航中,最致命的威胁往往是极其细小的树枝,这些障碍物通常无法被传统深度传感器有效捕获,且长时间飞行积累的视觉惯性里程计(VIO)漂移极易导致系统崩溃39。
为解决这一问题,研究人员部署了"仿真到现实"(Simulation-to-reality)的深度学习导航管道39。通过结合专用于小树枝检测的语义增强深度自编码器(Semantically-enhanced depth autoencoder),以及基于运动图元评估的碰撞预测网络(CPN),算法能够在机载的NVIDIA Orin NX计算平台上实时运行39。而在地下矿井的监督式自主检测中,研究团队不仅为无人机设计了机械防撞笼,还开发了多模态点云配准技术40。这种技术能够将高分辨率的视觉深度扫描数据无缝融合到基于全局激光雷达(LiDAR)的宏观工作空间地图中,精准重建关键矿柱的三维结构,大幅提升了资源管理和抢险救援的安全性40。
搜救行动(SAR)与开放式架构部署
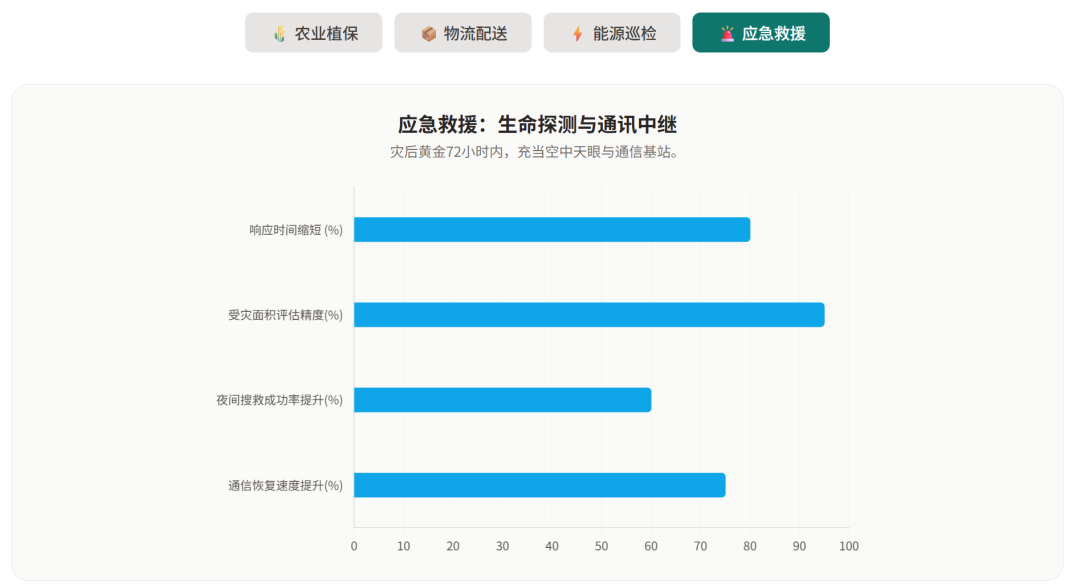
在搜索与救援(SAR)领域,无人机技术的整合已从单纯的"飞行摄像机"演变为由AI驱动的生命探测网络41。无论是在严寒的雪山搜救中利用热成像技术在20分钟内定位失踪人员,还是在结构性火灾和洪灾响应中提供实时的危害测绘,SAR无人机已被广泛证明能挽救生命41。
然而,面对复杂灾区,单一的商用封闭系统难以满足异构无人机协同调度的需求。为此,学术界开发了如AUSPEX(Automated Unmanned Aerial Swarm System for Planning and EXecution)这样的整体性、模块化开源框架45。AUSPEX将知识表示、感知、规划和执行等多种能力与先进的决策算法相集成45。这种开源架构不仅允许紧急救援指挥部将各种市售的异构无人机纳入同一个生态系统中,还确保了系统在极其混乱的搜救任务中具备高可扩展性和决策透明度45。
突破行星边界:火星与土卫六的地外探测
由于行星际通信存在巨大的时间延迟(光速下也需要几分钟到几十分钟不等),任何部署在地外星体的飞行器都必须具备"绝对自主"的飞行、导航与危险规避能力。在这方面,美国国家航空航天局(NASA)的"机智号"(Ingenuity)火星直升机开创了历史46。从2021年到2024年,机智号在密度不到地球1%的火星大气中成功完成了72次自主飞行,其主要依靠机载的Zigbee收发器、激光高度计和惯性传感器,证明了低密度大气中旋翼飞行的工程可行性46。
这一成功直接催生了后续更庞大的火星样本返回(Mars Sample Return, MSR)任务。在最新的商业主导设计方案中,洛克希德·马丁(Lockheed Martin)公司提出利用成熟的InSight着陆器架构,搭载小型的火星上升飞行器和下一代样本回收直升机,以极大降低任务质量和系统复杂性,实现从火星表面运回由"毅力号"收集的地质样本的壮举47。
此外,NASA定于2028年7月发射的"蜻蜓号"(Dragonfly)任务,则将这种自主探测能力推向了新的极端49。Dragonfly是一架体积庞大、由多任务放射性同位素热电发生器(MMRTG)提供核动力的旋翼飞行器49。凭借土卫六(Titan)极其浓厚的大气层和极低的重力,"蜻蜓号"将利用自主导航算法,在为期三年的任务中飞越多处不同的着陆点,深度寻找地球以外可能存在的生命构件49。
全球监管框架与低空经济的法制化进程
技术突破的商业变现离不开空域监管体系的革新。随着智能飞行器安全性和可靠性的提升,全球主要经济体正竞相通过立法与基础设施建设,争夺被称为"低空经济"(Low-Altitude Economy)的庞大新兴市场。
中国:国家战略级低空空域开发与数字化确权
中国已将低空经济(定义为3000米以下空域涉及无人机、eVTOL和直升机的商业航空活动)上升为国家核心战略51。据中国民用航空局(CAAC)及科研院所预测,该行业的产值将从2025年的1.5万亿人民币飙升至2030年的超过2万亿人民币(约合2850亿美元)52。
为支撑这一海量增长,中国全国人大常委会于2025年12月通过了全面修订的《民用航空法》(将于2026年7月1日生效)。这是自1995年以来的首次彻底重写,首次在国家法律层面明确将低空运行、无人驾驶航空器适航认证以及空域开发予以法制化51。该法案的第70至74条明确强制要求空域管理机构在划分国家空域时必须为低空经济发展预留走廊,为地方政府和垂直起降场(Vertiport)开发商提供了极强的法定背书51。
在执行层面,CAAC推出了"国家-省-市"三级无人机和eVTOL综合飞行授权服务平台55。该系统彻底颠覆了传统的纸质审批流程,将人工智能和大数据技术深度融合,实现自动规划最优航线、预测飞行风险以及实时监控空中交通55。这种相当于为低空飞行安装"智能大脑"的举措,实现了"一窗受理、一网通办",将原本需要一周的审批时间压缩了50%以上,极大地释放了无人机配送、电力巡检和空中旅游的市场活力54。
美国:FAA的BVLOS常态化与强制执法机制
在美国,联邦航空管理局(FAA)为整合先进空中交通(AAM),采取了"宽松授权与严厉执法"并行的双轨策略56。其核心是推进名为Part 108的拟议规则制定通知(NPRM),旨在将超视距(BVLOS)无人机运行常态化57。Part 108抛弃了以往效率低下的"逐案豁免"框架,转向基于性能的监管机制,明确了远程身份识别(Remote ID)、避让检测能力(Detect-and-avoid)以及空域路权(Right-of-way)的新标准57。这一法案将为大规模的包裹交付、基础设施检查铺平道路。
与此同时,为了确保国家空域系统(NAS)的绝对安全,FAA在2025年和2026年大幅升级了惩罚性执法力度。对于在重大体育赛事上空、受限制空域(如海湖庄园)或干扰紧急救援行动的未经授权飞行,FAA将单次违规罚款上限提升至75,000美元,并可直接吊销甚至起诉无证操作者的关联公司59。这种强有力的威慑政策,是确保商业无人机技术不会威胁传统航空运输与地面公众安全的重要基石。
欧洲:EASA的U-space实施与统一适航体系
欧洲航空安全局(EASA)则通过《欧洲航空安全计划》(EPAS 2022-2026)和U-space监管框架(实施条例EU 2021/664),在27个成员国间推动高度标准化的无人机交通管理系统60。U-space不仅要求U-space服务提供商(USSPs)必须提供包括网络识别、地理感知、UAS飞行授权和交通信息在内的四项强制性服务,还致力于通过汉堡等城市的试点,解决受控空域内复杂的各方利益协调问题62。
在2026年初,EASA连续发布了ED Decision 2026/001/R和2026/002/R,标志着新型空中机动飞行器持续适航标准的重大里程碑65。这些决策修订了CS-MCSD规范,专门针对电动、混合动力及其他非传统推进系统的维修认证人员,建立了一套结构化的理论培训和执照类别认定框架65。通过这些前瞻性的规范,欧洲不仅消除了新型航空器在维护方面的安全隐患,还巩固了其作为与美国并驾齐驱的全球航空认证中心的战略地位65。
|------------------|--------------------------------------------|---------------------------------|-------------------------------------|
| 监管机构与地区 | 核心法案与战略框架 | 关键技术与合规焦点 | 对商业部署的影响 |
| 中国 (CAAC / 全国人大) | 2026版《民用航空法》修订案,低空经济战略 | AI驱动的三级飞行授权审批网络,eVTOL适航证补齐 | 极大地促进了基础设施(如垂直起降场)的投资与地方财政补贴的发放。 |
| 美国 (FAA) | Part 108 拟议规则 (BVLOS常态化),AAM国家战略 | 基于性能的避让检测,空域路权划分,严格罚款政策(至$75k) | 打破了长久以来的商业化瓶颈,使大规模无人机物流链的规模化变得合规。 |
| 欧洲 (EASA) | EPAS 2022-2026, U-space 实施框架 (EU 2021/664) | 强制性数字服务提供(USSP认证),CS-MCSD新型维修认证 | 确保了27个成员国之间无缝的技术护照和运营互认,加快了空管数字化进程。 |
学术前沿与商业生态的协同共振
智能飞行机器人技术的爆发式演进,源于全球顶尖学术机构与拥有巨额资本的科技独角兽之间紧密的转化闭环。
在学术界的最前沿,苏黎世联邦理工学院(ETH Zurich)自主系统实验室及机器人与感知小组持续输出具有行业定义价值的研究成果。从致力于解决关键基础设施遥控操作检查的AERO-TRAIN项目、能够持续飞行10天的AtlantikSolar太阳能无人机,到专为高层建筑和森林火灾设计的绳系消防无人机(FI-AIR系统),ETH在应用领域展现出深厚的技术积淀67。同时,宾夕法尼亚大学(UPenn)的GRASP实验室在视觉变换器(Vision Transformers)的端到端无人机避障,以及城市多风动态环境中的安全区间运动规划方面,不断推进行业标准69。中国方面,北京航空航天大学在跨介质机器人、微型仿生智能以及倾转旋翼飞行汽车(如"鹞式"海陆空两栖飞行汽车)的研发上不断取得Nature级突破,成为支撑中国低空经济硬件创新的核心引擎26。
这种学术突破正在以前所未有的速度转化为商业估值。资本市场认识到,机器人行业最大的瓶颈在于底层"通用智能"的缺失。因此,专注于为机器人系统开发基础智能层的初创公司如Skild AI,在成立仅七个月后便斩获了由软银(SoftBank)领投的14亿美元C轮融资,其估值飙升至140亿美元以上,实现了惊人的商业跃迁73。在防务和重工业市场,公司如Ascent AeroSystems通过将嵌入式AI引入微型共轴无人机(如Helius),彻底改变了受NDAA(国防授权法案)合规约束的军事市场格局74。更有如ZIYAN的自动停机坪技术,彻底清除了无人机维护中的人力干预需求,打通了全天候连续作业的最后壁垒74。这种生态系统的狂飙突进,与Waymo在自动驾驶汽车领域取得阶段性胜利(2024年底达到每周15万次付费出行)形成了强烈的历史呼应------所有迹象均表明,无人系统跨越商业奇点已不再是科幻预言,而是正在发生的现实75。
结论
综上所述,截至2026年,智能飞行机器人的研究进展已经全面超越了早期的机械迭代与单纯的算法调优,正式迈入由物理人工智能主导的系统性爆发阶段。通过将边缘计算、神经形态异步感知(如Loihi 2与事件相机)以及多智能体强化学习相融合,现代空中机器人已经具备了在通信断绝、GPS拒止以及地外极端环境中独立进行复杂战略推理和行动的能力。与此同时,在硬件材料端,自修复软体聚合物与固态、氢能等下一代高密度动力源的成熟,正在系统性地摧毁限制无人系统滞空时间与耐用性的物理边界。
最为关键的是,技术创新的狂飙不再处于监管的真空地带。随着中美欧三大经济体纷纷从国家立法层面(如中国的《民航法》修订、美国的Part 108法则、欧洲的U-space实施)对低空运行体系进行彻底的重构,一个价值数万亿美元的全球"低空经济"大幕已然拉开。未来,空中机器人的进化不仅将颠覆人类的物流配送、灾害管理和城市交通模式,更将倒逼国际社会在自动化战争问责体系和AI伦理界限上进行深刻的哲学重构。在这个人机共存的新纪元,物理人工智能在三维空间中的泛滥与治理,将成为决定下一个十年全球科技竞争格局的核心命题。