摘要: 园区室外无人车(UGV)进入建筑内部并跨层作业,涉及复杂的跨网域(Outdoor 5G to Indoor LAN)通信切换与高风险的物理空间转移。本文从系统架构师视角,深度拆解如何构建一套高可用的机器人梯控 通信系统。重点探讨边缘节点如何处理网络平滑过渡、如何执行非侵入式 信号采集,并分享一段用于处理跨网域确认与精准平层 校验的底层 Python 状态机代码。
导语: 解决室外到室内的全场景调度,不能仅靠单一的云端指令下发。构建支持跨网域容灾与边缘硬件双重校验的混合通信架构,实现物理感知与逻辑调度的彻底解耦,才是规避车辆卡滞与断联的专业路径。

基于边缘协同的跨网域无人车乘梯架构
一、 痛点解析:网络切换与协议断层 当无人车从开阔的室外驶入由钢筋混凝土屏蔽的电梯厅时,网络信号的抖动不可避免。如果此时直接向云端请求控制传统电梯,极易因延迟导致动作错乱。 架构设计必须引入边缘通信设备作为枢纽。边缘设备通过数字输出(DO)通道闭合电梯外呼干接点,并在本地完成从机器人 MQTT 报文到物理电平的协议转换。同时,严禁读取电梯主板协议,必须通过外接独立传感器监听楼层状态,实现物理层面的非侵入式容错。
二、 网络握手与边缘双重硬校验 为保障室外重型无人车的安全,边缘侧需执行严格的状态机轮询。 在收到乘梯请求后,边缘节点需验证无人车是否已成功切换至室内通信模式,并执行双重物理校验:
- 采集加装的独立传感器传回的物理精准平层 到位信号。
- 采集门机系统的旁路干接点门锁断开信号。
三、 核心代码实战:跨网域协同与防卡滞状态机 以下 Python 代码模拟了边缘梯控设备如何处理网络模式确认、过滤物理杂波,并响应大吨位无人车的跨层通信请求:
Python
import time
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [UGV_LINKAGE_EDGE] - %(message)s')
class OutdoorToIndoorElevatorFSM:
def __init__(self):
self.state = "AWAITING_NETWORK_HANDOVER"
self.filter_window = 0.08 # 80毫秒软件抗干扰采样窗,适应重载引起的微震
self.signal_stable_time = 0
def verify_indoor_network_status(self, vehicle_id):
"""模拟验证室外无人车是否已稳定切换至室内局域网/专网"""
logging.info(f"Network Check: Vehicle {vehicle_id} successfully handed over to Indoor LAN.")
return True
def get_non_invasive_signals(self):
"""模拟读取外围独立传感器的物理电平(严禁采集核心主板)"""
# 返回值:precise_leveling(精准平层对齐), door_fully_open(门禁彻底开启)
return {"precise_leveling": 1, "door_fully_open": 1}
def run_linkage_logic(self, vehicle_id, target_floor):
if self.state == "AWAITING_NETWORK_HANDOVER":
if self.verify_indoor_network_status(vehicle_id):
self.state = "EVALUATING_PHYSICAL_SAFE"
else:
return
signals = self.get_non_invasive_signals()
# 针对精准平层的双重物理校验,保障室外悬挂底盘在室内不卡滞
if signals["precise_leveling"] == 1 and signals["door_fully_open"] == 1:
if self.signal_stable_time == 0:
self.signal_stable_time = time.time()
elif (time.time() - self.signal_stable_time) > self.filter_window:
if self.state != "READY_FOR_VEHICLE":
logging.info(f"Protocol translated. Alignment strictly verified. UGV {vehicle_id} enter floor {target_floor}.")
self.state = "READY_FOR_VEHICLE"
else:
self.signal_stable_time = 0
if self.state == "READY_FOR_VEHICLE":
logging.warning("Physical misalignment or door status flutter detected. Revoking access.")
self.state = "EVALUATING_PHYSICAL_SAFE"
# 模拟室外车驶入室内的逻辑轮询
if __name__ == "__main__":
controller = OutdoorToIndoorElevatorFSM()
for _ in range(4):
controller.run_linkage_logic(vehicle_id="OUTDOOR_PATROL_01", target_floor=3)
time.sleep(0.04)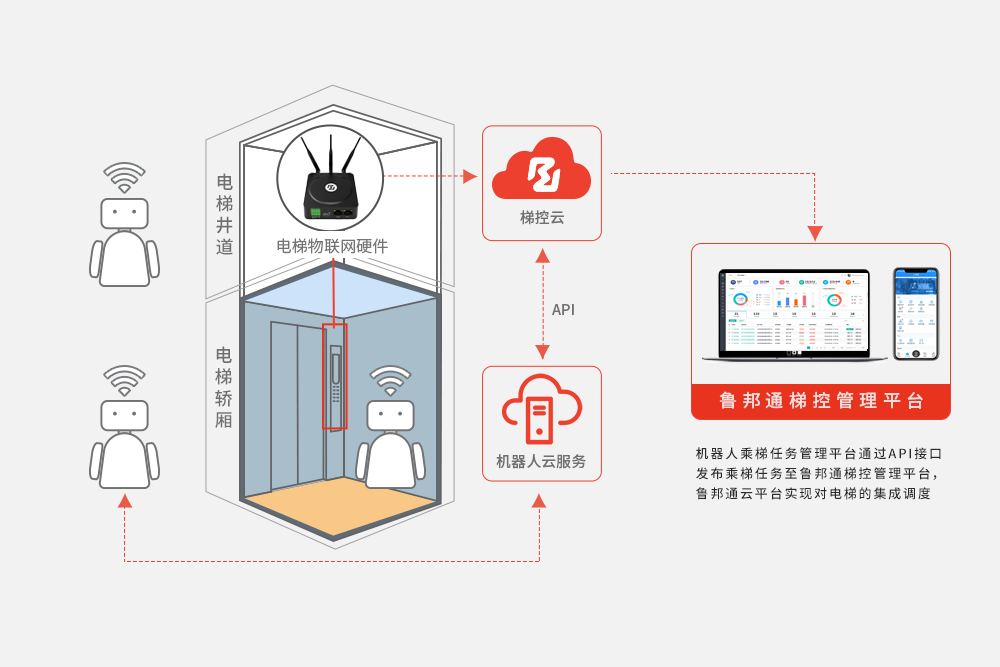
常见问题解答 (FAQ)
问题 1、如果网络切换失败,设备会锁死吗?
回答 1、不会。边缘梯控设备内部的状态机会设置超时机制。如果在规定时间内未完成网络握手或物理校验,设备会自动复位电梯状态,并向后台推送异常日志,避免电梯被长期无效占用。
问题 2、为什么不直接利用厂家的 API 接口控制电梯?
回答 2、电梯主板协议是封闭的安全系统。未经授权的 API 对接会带来严重的特种设备合规风险。采用边缘通信设备加上底层的非侵入式外围采集,是合规且稳妥的技术路径。
问题 3、如何应对重型车辆进出时的动态沉降?
回答 3、独立传感器需具备高频动态采样能力。在车辆跨越地坎的全过程中,持续监测精准平层 状态,一旦偏差超过安全阈值,立即触发底层硬件保护。
总结: 跨域场景调度需要对通信协议与物理特性的双重敬畏。通过边缘协同与非侵入式的硬件架构设计,能够在保障设备合规的前提下,为园区无人车的立体跨越筑起顺畅的数字通道。