ADB(Adaptive Driving Beam)自适应远光系统精要解析
一、ADB是什么
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 核心概念一句话 │
│ │
│ ADB = 在保持远光开启的同时,精确遮蔽会让其他道路使用者眩目的光束区域 │
│ │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ 传统方式(二选一): │ │
│ │ │ │
│ │ 远光ON: ████████████████████████ ← 照得远,但眩目他车 │ │
│ │ 全照亮,包括对向车区域 │ │
│ │ │ │
│ │ 近光ON: ███████ ← 不眩目,但照得近 │ │
│ │ 只照近处 │ │
│ │ │ │
│ │ ADB方式(精确遮蔽): │ │
│ │ │ │
│ │ ADB ON: ████████ ████████████ ← 既照得远,又不眩目 │ │
│ │ ↑遮蔽↑ │ │
│ │ 只关闭对向车所在区域 │ │
│ │ │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 与AFS的关系: │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ AFS (Adaptive Front-lighting System) ← 广义自适应前照明系统 │ │
│ │ ├── 弯道照明 (Curve Lighting) │ │
│ │ ├── 水平调节 (Leveling) │ │
│ │ ├── 场景模式 (City/Highway/Weather) │ │
│ │ └── ADB (Adaptive Driving Beam) ← AFS的子功能,专注远光防眩目 │ │
│ │ │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 法规: │
│ ECE R123 / ECE R149(欧洲)、GB 25991(中国)、FMVSS 108(美国2022解禁)│
│ │
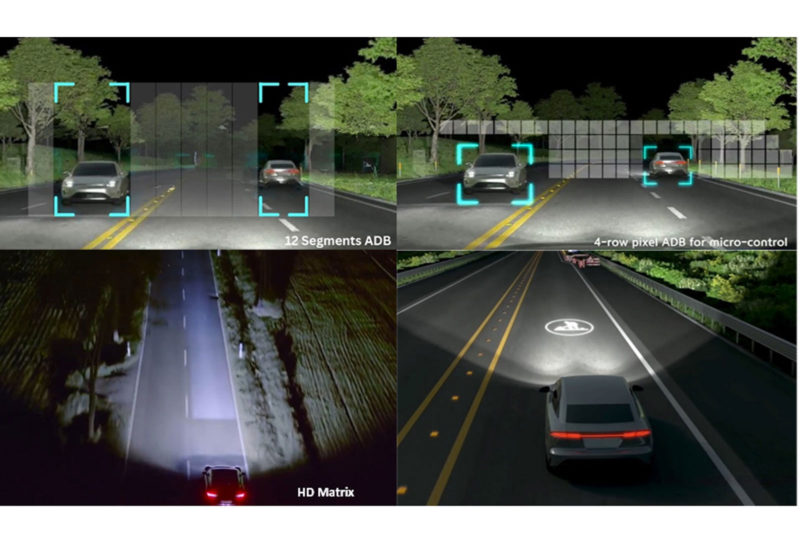
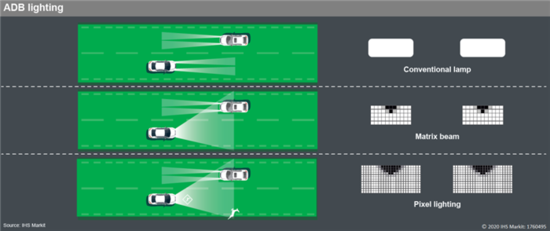
└─────────────────────────────────────────────────────────────────────────┘二、技术代际演进
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 四代技术演进 │
│ │
│ │
│ 第一代 HBA:远/近光自动切换(全开或全关) │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ 有车→全部近光 无车→全部远光 │ │
│ │ ║ ║ ║████████║ │ │
│ │ ║ 近光 ║ ←→ ║ 远光 ║ │ │
│ │ ║ ║ ║████████║ │ │
│ │ █ █ │ │
│ │ │ │
│ │ 原理:摄像头检测灯光 → 简单阈值判断 → 继电器切换远/近光 │ │
│ │ 像素数:0(不分区,整体切换) │ │
│ │ 响应:~500ms │ │
│ │ 体验:切换时视觉跳变明显 │ │
│ │ 成本:低(仅需摄像头+简单算法) │ │
│ │ 代表:丰田HBA、大众Light Assist(2010-2015) │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │ │
│ ▼ │
│ 第二代 分段式:LED分区独立开关(5-25分区) │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ LED分区布局(单侧12分区示例): │ │
│ │ ┌──┬──┬──┬──┬──┬──┬──┬──┬──┬──┬──┬──┐ │ │
│ │ │①│②│③│④│⑤│⑥│⑦│⑧│⑨│⑩│⑪│⑫│ │ │
│ │ └──┴──┴──┴──┴──┴──┴──┴──┴──┴──┴──┴──┘ │ │
│ │ │ │
│ │ 遮蔽前车时:关闭区域⑤⑥⑦ │ │
│ │ ┌──┬──┬──┬──┬──┬──┬──┬──┬──┬──┬──┬──┐ │ │
│ │ │██│██│██│██│ │ │ │██│██│██│██│██│ │ │
│ │ └──┴──┴──┴──┴──┴──┴──┴──┴──┴──┴──┴──┘ │ │
│ │ ↑遮蔽↑ │ │
│ │ │ │
│ │ 原理:每个LED区域可独立开关(ON/OFF),无中间亮度 │ │
│ │ 响应:~100ms │ │
│ │ 问题:分区太粗,遮蔽面积过大(浪费照明) │ │
│ │ 代表:奥迪Matrix LED(2013, 25分区)、宝马Adaptive LED(2015) │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │ │
│ ▼ │
│ 第三代 高分辨率矩阵:大量LED像素独立调光(84-260像素) │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ LED矩阵布局(单侧84像素示例,奔驰Digital Light): │ │
│ │ ┌─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┐ │ │
│ │ │█│█│█│█│█│ │ │ │█│█│█│█│█│█│█│█│█│█│█│█│█│ │ │
│ │ ├─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┤ │ │
│ │ │█│█│█│█│█│▓│ │▓│█│█│█│█│█│█│█│█│█│█│█│█│█│ │ │
│ │ ├─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┤ │ │
│ │ │█│█│█│█│█│▓│ │▓│█│█│█│█│█│█│█│█│█│█│█│█│█│ │ │
│ │ ├─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┼─┤ │ │
│ │ │█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│█│ │ │
│ │ └─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┘ │ │
│ │ ↑ ↑ │ │
│ │ 遮蔽核心 过渡区 │ │
│ │ (0%亮度) (30-60%) │ │
│ │ │ │
│ │ 关键进步: │ │
│ │ - 每个LED可独立调光(PWM 0-100%,非仅开关) │ │
│ │ - 渐变过渡区(避免明暗边界突兀) │ │
│ │ - 可同时遮蔽8-15个目标 │ │
│ │ - 遮蔽区域紧贴车辆轮廓 │ │
│ │ 响应:<50ms │ │
│ │ 代表:奔驰S级 W223(84像素)、奥迪e-tron(260像素) │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │ │
│ ▼ │
│ 第四代 DMD/DLP像素投影:超高分辨率(130万像素) │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ DMD (Digital Micromirror Device) 原理: │ │
│ │ ┌────────────────────────────────────────────────────────────┐ │ │
│ │ │ │ │ │
│ │ │ LED光源 → 光学准直 → DMD芯片 → 投影透镜 → 路面 │ │ │
│ │ │ ↑ │ │ │
│ │ │ 130万个微镜 │ │ │
│ │ │ 每个可独立翻转 │ │ │
│ │ │ +12°(开) / -12°(关) │ │ │
│ │ │ 翻转时间: <1μs │ │ │
│ │ │ 刷新率: 5000Hz+ │ │ │
│ │ │ │ │ │
│ │ │ 灰度实现原理(PWM时分调光): │ │ │
│ │ │ ┌────────────────────────────────────────────┐ │ │ │
│ │ │ │ 100%亮度: ████████████████████ (常开) │ │ │ │
│ │ │ │ 75%亮度: ███████████████░░░░░ (3/4时间开) │ │ │ │
│ │ │ │ 50%亮度: ██████████░░░░░░░░░░ (1/2时间开) │ │ │ │
│ │ │ │ 25%亮度: █████░░░░░░░░░░░░░░░ (1/4时间开) │ │ │ │
│ │ │ │ 0%亮度: ░░░░░░░░░░░░░░░░░░░░ (常关) │ │ │ │
│ │ │ │ │ │ │ │
│ │ │ │ 由于5000Hz刷新,人眼看到的是平均亮度 │ │ │ │
│ │ │ └────────────────────────────────────────────┘ │ │ │
│ │ └────────────────────────────────────────────────────────────┘ │ │
│ │ │ │
│ │ 功能远超ADB(防眩目只是基础): │ │
│ │ ┌────────────────────────────────────────────────────────────┐ │ │
│ │ │ 1. 防眩目(基础ADB) → 精度到厘米级 │ │ │
│ │ │ 2. 导航箭头路面投影 → 前方路面显示转弯方向 │ │ │
│ │ │ 3. 行人聚光 → 识别行人并高亮照射 │ │ │
│ │ │ 4. 车道线投影 → 在路面画出虚拟车道线 │ │ │
│ │ │ 5. 施工区警示投影 → 显示警告符号 │ │ │
│ │ │ 6. 停车辅助线投影 → 显示车宽指示线 │ │ │
│ │ │ 7. 迎宾动画 → 上下车时灯光动画效果 │ │ │
│ │ └────────────────────────────────────────────────────────────┘ │ │
│ │ │ │
│ │ 代表:奔驰EQS、奥迪Q6 e-tron、智己LS7(260万像素)、理想L9 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 四代技术对比总结: │
│ ┌──────────┬─────────┬──────────┬──────────────┬──────────────────┐ │
│ │ 代际 │ 像素数 │ 调光能力 │ 响应时间 │ 成本(单侧) │ │
│ ├──────────┼─────────┼──────────┼──────────────┼──────────────────┤ │
│ │ HBA │ 0 │ 全开/关 │ ~500ms │ $20-50 │ │
│ │ 分段式 │ 5-25 │ 开/关 │ ~100ms │ $100-300 │ │
│ │ 高分辨率 │ 84-260 │ 0-100% │ <50ms │ $300-800 │ │
│ │ DMD/DLP │ 130万+ │ 0-100% │ <1ms │ $800-2000+ │ │
│ └──────────┴─────────┴──────────┴──────────────┴──────────────────┘ │
│ │
└─────────────────────────────────────────────────────────────────────────┘三、系统架构
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 系统架构 │
│ │
│ ┌──────────────────── 感知层 ────────────────────┐ │
│ │ │ │
│ │ 前视摄像头(HDR, 120dB+, 夜间优化) │ │
│ │ ┌──────────────────────────────────────────┐ │ │
│ │ │ 检测目标: │ │ │
│ │ │ • 对向车前灯(白/黄色亮点对) │ │ │
│ │ │ • 前车尾灯(红色亮点对) │ │ │
│ │ │ • 行人/骑行者(高级功能) │ │ │
│ │ │ • 路灯/交通信号灯(过滤干扰) │ │ │
│ │ │ • 反射器/路面标识 │ │ │
│ │ └──────────────────────────────────────────┘ │ │
│ │ │ │
│ │ 辅助信号(通过CAN总线获取): │ │
│ │ • 车速 ← ABS/ESP ECU │ │
│ │ • 方向盘转角 ← 转向角传感器 │ │
│ │ • 环境光 ← 光线传感器 │ │
│ │ • 导航数据 ← 导航ECU(预判弯道/隧道) │ │
│ │ • 雨量 ← 雨量传感器 │ │
│ └────────────────────┬───────────────────────────┘ │
│ │ │
│ ▼ │
│ ┌──────────────────── 决策层 ────────────────────┐ │
│ │ │ │
│ │ ADB控制单元(集成在ADAS ECU或独立灯光ECU中) │ │
│ │ ┌──────────────────────────────────────────┐ │ │
│ │ │ │ │ │
│ │ │ ① 灯光检测算法 │ │ │
│ │ │ 传统CV: 阈值分割→Blob分析→颜色分类 │ │ │
│ │ │ 或 深度学习: CNN目标检测(YOLO等) │ │ │
│ │ │ │ │ │
│ │ │ ② 多目标跟踪 │ │ │
│ │ │ 卡尔曼滤波 + 匈牙利算法关联 │ │ │
│ │ │ 状态: [位置x, 位置y, 速度vx, 速度vy] │ │ │
│ │ │ │ │ │
│ │ │ ③ 坐标变换 │ │ │
│ │ │ 摄像头像素 → 世界坐标 → LED像素索引 │ │ │
│ │ │ (考虑摄像头标定+大灯光学标定) │ │ │
│ │ │ │ │ │
│ │ │ ④ 遮蔽计算 │ │ │
│ │ │ 核心区(0%) + 过渡区(30-60%) + 全亮区 │ │ │
│ │ │ 多目标融合: 取最低亮度 │ │ │
│ │ │ │ │ │
│ │ │ ⑤ 时间平滑 │ │ │
│ │ │ 低通滤波 + 迟滞逻辑 + 渐变恢复 │ │ │
│ │ │ │ │ │
│ │ └──────────────────────────────────────────┘ │ │
│ └────────────────────┬───────────────────────────┘ │
│ │ │
│ ▼ │
│ ┌──────────────────── 执行层 ────────────────────┐ │
│ │ │ │
│ │ LED矩阵/DMD大灯模块 │ │
│ │ ┌──────────────────────────────────────────┐ │ │
│ │ │ 低分辨率(5-260 LED): │ │ │
│ │ │ ADB ECU →CAN/LIN→ LED驱动IC → LED阵列 │ │ │
│ │ │ (PWM调光, 每路0-100%) │ │ │
│ │ │ │ │ │
│ │ │ 高分辨率(DMD 130万像素): │ │ │
│ │ │ ADB ECU →LVDS/高速接口→ DMD控制器 → 微镜 │ │ │
│ │ │ (传输1920×720位图, 5000Hz刷新) │ │ │
│ │ └──────────────────────────────────────────┘ │ │
│ └────────────────────────────────────────────────┘ │
│ │
└─────────────────────────────────────────────────────────────────────────┘四、核心算法流程
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 算法 Pipeline │
│ │
│ 摄像头原始图像 (1280×960, 30fps) │
│ │ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 1. 预处理 │ │
│ │ - 去畸变 │ │
│ │ - HDR合成 │ │
│ │ - ROI提取(前方±45°) │ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 2. 灯光检测 │ │
│ │ │ │
│ │ 传统CV流程: │ 深度学习流程: │
│ │ ┌────────────────────┐ │ ┌────────────────────┐ │
│ │ │ 亮度阈值分割 │ │ │ CNN检测器(YOLOv5) │ │
│ │ │ → Blob连通域分析 │ │ │ → 端到端目标检测 │ │
│ │ │ → 颜色分类(红/白) │ │ │ → bbox+类别+置信度 │ │
│ │ │ → 对称性判断 │ │ └────────────────────┘ │
│ │ │ → 几何特征过滤 │ │ │
│ │ └────────────────────┘ │ │
│ │ │ │
│ │ 输出: 候选灯光列表 │ │
│ │ {type, position, size, │ │
│ │ color, confidence} │ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 3. 目标分类 │ │
│ │ │ │
│ │ 白色亮点对 → 对向车前灯 │ │
│ │ 红色亮点对 → 前车尾灯 │ │
│ │ 单个白点 → 摩托车/自行车 │ │
│ │ 路灯模式 → 过滤(不遮蔽)│ │
│ │ 反射器 → 过滤(不遮蔽)│ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 4. 多目标跟踪 (MOT) │ │
│ │ │ │
│ │ 卡尔曼滤波器: │ │
│ │ 状态 X = [x, y, vx, vy] │ │
│ │ 预测 → 匹配 → 更新 │ │
│ │ │ │
│ │ 生命周期管理: │ │
│ │ 连续3帧检测 → 创建轨迹 │ │
│ │ 连续5帧丢失 → 删除轨迹 │ │
│ │ │ │
│ │ 输出: 稳定的目标轨迹列表 │ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 5. 距离估算 │ │
│ │ │ │
│ │ 单目方法: │ │
│ │ d = (f × W_real) / W_pixel │ │
│ │ (假设标准车灯宽度) │ │
│ │ │ │
│ │ 融合方法: │ │
│ │ 摄像头角度 + 毫米波雷达距离│ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 6. 坐标变换 │ │
│ │ │ │
│ │ 摄像头像素坐标 (u, v) │ │
│ │ ↓ 逆投影变换 │ │
│ │ 世界坐标 (X, Y, Z) │ │
│ │ ↓ 大灯光学映射 │ │
│ │ LED像素坐标 (i, j) │ │
│ │ │ │
│ │ 需要: 摄像头内外参 + 大灯 │ │
│ │ 安装标定 + 车身姿态 │ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 7. 遮蔽区域计算 │ │
│ │ │ │
│ │ 每个目标生成遮蔽掩膜: │ │
│ │ │ │
│ │ ┌─────────────────────┐ │ │
│ │ │ ▓▓▓▓▓▓▓▓▓▓▓▓▓▓▓ │ │ │
│ │ │ ▓▓▒▒▒▒▒▒▒▒▒▒▒▓▓ │ │ ▓ = 过渡区(30-60%) │
│ │ │ ▓▒▒░░░░░░░░░▒▒▓ │ │ ▒ = 过渡区2(10-30%) │
│ │ │ ▓▒░░ ░░▒▓ │ │ ░ = 核心遮蔽(0-5%) │
│ │ │ ▓▒░░ ◉车辆 ░░▒▓ │ │ 空白 = 全亮(100%) │
│ │ │ ▓▒░░ ░░▒▓ │ │ │
│ │ │ ▓▒▒░░░░░░░░░▒▒▓ │ │ 余量: 横向+0.5m, 纵向+5m │
│ │ │ ▓▓▒▒▒▒▒▒▒▒▒▒▒▓▓ │ │ │
│ │ │ ▓▓▓▓▓▓▓▓▓▓▓▓▓▓▓ │ │ │
│ │ └─────────────────────┘ │ │
│ │ │ │
│ │ 多目标融合: │ │
│ │ brightness = min(mask1, │ │
│ │ mask2, ...) │ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ ┌─────────────────────────────┐ │
│ │ 8. 时间平滑 │ │
│ │ │ │
│ │ 亮度低通滤波: │ │
│ │ B[t] = 0.4×B_calc │ │
│ │ + 0.6×B[t-1] │ │
│ │ │ │
│ │ 迟滞逻辑: │ │
│ │ 目标出现 → 立即遮蔽(<50ms)│ │
│ │ 目标消失 → 延迟恢复(500ms)│ │
│ │ 恢复过程 → 200ms渐变(0→100%)│ │
│ └──────────────┬──────────────┘ │
│ ▼ │
│ LED亮度矩阵 brightness[i][j] → 发送到大灯模块 │
│ │
└─────────────────────────────────────────────────────────────────────────┘五、典型场景示意
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 典型工作场景 │
│ │
│ 场景1:单辆对向车 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ ████████████ ██████████████████ │ │
│ │ ████████████ ██████████████████ │ │
│ │ ████████████ ██████████████████ │ │
│ │ ↑遮蔽↑ │ │
│ │ █本车 ◉←对向车 │ │
│ │ │ │
│ │ 策略: 精确遮蔽对向车灯所在角度范围 │ │
│ │ 其余区域保持远光 → 驾驶员仍有200m+视距 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 场景2:多车混合(对向车+前车+同向远车) │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ ████ ██ ████ ██ ████████████████ │ │
│ │ ████ ██ ████ ██ ████████████████ │ │
│ │ ████ ██ ████ ██ ████████████████ │ │
│ │ ↑ ↑ ↑ │ │
│ │ 对向 前车1 前车2 │ │
│ │ │ │
│ │ █本车 │ │
│ │ │ │
│ │ 策略: 同时计算多个遮蔽区域,独立追踪每个目标 │ │
│ │ 未被遮蔽区域仍然保持远光照明 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 场景3:弯道中的对向车 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ ╱═════════════╲ │ │
│ │ ╱ ████ ████ ╲ │ │
│ │ ╱ ████ ████ ╲ │ │
│ │ ╱ ↑遮蔽 ╲ │ │
│ │ ╱ ◉ 对向车 ╲ │ │
│ │ ╱ ╲ │ │
│ │ █本车 │ │
│ │ │ │
│ │ 策略: 结合方向盘转角和车速 │ │
│ │ 弯道照明向内侧偏转 + ADB遮蔽对向车 │ │
│ │ (AFS弯道功能与ADB防眩目协同工作) │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 场景4:行人聚光(高级ADB + DLP) │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ ████████████████ ██████████████████ │ │
│ │ ████████████████ ██████████████████ │ │
│ │ ████████████████ ██████████████████ │ │
│ │ ↑遮蔽↑ ↑聚光↑ │ │
│ │ ◉车 🚶←行人(被加亮照射) │ │
│ │ │ │
│ │ █本车 │ │
│ │ │ │
│ │ 策略: 遮蔽前车 + 在行人区域集中亮度 │ │
│ │ 行人被高亮照射但不眩目(侧面照明角度) │ │
│ │ 提升行人可见度,帮助驾驶员提前发现 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 场景5:隧道出入口 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ 进入隧道前: │ │
│ │ 导航数据预判 → 提前切换近光模式 │ │
│ │ (隧道内有路灯,不需要远光) │ │
│ │ │ │
│ │ 离开隧道后: │ │
│ │ 检测环境光恢复暗环境 → 延迟2s后开启ADB │ │
│ │ (等待瞳孔适应) │ │
│ │ │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
└─────────────────────────────────────────────────────────────────────────┘六、车载总线通信
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 车载总线通信架构 │
│ │
│ 总线拓扑: │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ ADAS CAN ═══╪══════════════════════════════════ │ │
│ │ │ │ │
│ │ 前视摄像头ECU │ │
│ │ (目标检测结果) │ │
│ │ │ │
│ │ Body CAN ═══╪═══════╪═══════╪═══════╪══════════ │ │
│ │ │ │ │ │ │ │
│ │ ADB/ 转向角 车速 环境光 │ │
│ │ 灯光ECU 传感器 (ABS) 传感器 │ │
│ │ │ │ │
│ │ │ LIN (大灯内部) │ │
│ │ ───┼──────┬──────┬────── │ │
│ │ │ │ │ │ │
│ │ 左大灯 右大灯 水平电机 │ │
│ │ LED驱动 LED驱动 │ │
│ │ │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 关键CAN消息: │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ │ │
│ │ 1. 摄像头 → ADB ECU:目标检测结果 │ │
│ │ ┌────────────────────────────────────────────────────────────┐ │ │
│ │ │ ID: 0x760-0x76F (支持最多8个目标, 50ms周期) │ │ │
│ │ │ │ │ │
│ │ │ 每个目标: │ │ │
│ │ │ Byte 0-1: 水平角度 (0.1°/bit, ±25°, 以车辆中心线为0) │ │ │
│ │ │ Byte 2-3: 距离 (0.1m/bit, 0-400m) │ │ │
│ │ │ Byte 4: 目标宽度估计 (0.1m/bit) │ │ │
│ │ │ Byte 5: 类型 (0x01对向 0x02前车 0x03行人 0x04摩托) │ │ │
│ │ │ Byte 6: 置信度 (0-100%) │ │ │
│ │ │ Byte 7: 跟踪ID (0-255) │ │ │
│ │ └────────────────────────────────────────────────────────────┘ │ │
│ │ │ │
│ │ 2. 车身信号 → ADB ECU:车辆状态 │ │
│ │ ┌────────────────────────────────────────────────────────────┐ │ │
│ │ │ 方向盘转角: ID 0x0C0 (10ms) │ │ │
│ │ │ 车速: ID 0x0B4 (20ms) │ │ │
│ │ │ 环境光: ID 0x3E0 (200ms) │ │ │
│ │ │ 灯光开关: ID 0x2F8 (100ms) │ │ │
│ │ │ 雨量: ID 0x3E2 (500ms) │ │ │
│ │ └────────────────────────────────────────────────────────────┘ │ │
│ │ │ │
│ │ 3. ADB ECU → 大灯模块:LED控制命令 │ │
│ │ ┌────────────────────────────────────────────────────────────┐ │ │
│ │ │ 低分辨率方案 (LIN总线, 5-25 LED): │ │ │
│ │ │ ┌──────────────────────────────────────────────────────┐ │ │ │
│ │ │ │ LIN Frame ID 0x20 (20ms周期) │ │ │ │
│ │ │ │ Data[0]: LED 1-8 开关状态 (bit图) │ │ │ │
│ │ │ │ Data[1]: LED 9-16 开关状态 │ │ │ │
│ │ │ │ Data[2]: LED 17-24 开关状态 │ │ │ │
│ │ │ │ Data[3]: 全局亮度比例 (0-100%) │ │ │ │
│ │ │ └──────────────────────────────────────────────────────┘ │ │ │
│ │ │ │ │ │
│ │ │ 中分辨率方案 (CAN FD, 84-260 LED): │ │ │
│ │ │ ┌──────────────────────────────────────────────────────┐ │ │ │
│ │ │ │ CAN FD ID 0x300 (10ms周期, 64字节payload) │ │ │ │
│ │ │ │ Data[0-63]: 64个LED的亮度值 (0-255 = 0-100%) │ │ │ │
│ │ │ │ │ │ │ │
│ │ │ │ CAN FD ID 0x301 (10ms周期) │ │ │ │
│ │ │ │ Data[0-63]: 后续64个LED的亮度值 │ │ │ │
│ │ │ │ ... │ │ │ │
│ │ │ └──────────────────────────────────────────────────────┘ │ │ │
│ │ │ │ │ │
│ │ │ 高分辨率方案 (DMD, 130万像素): │ │ │
│ │ │ ┌──────────────────────────────────────────────────────┐ │ │ │
│ │ │ │ LVDS / 专用高速接口 (非CAN/LIN) │ │ │ │
│ │ │ │ 传输完整位图 (1920×720, 1bit/pixel) │ │ │ │
│ │ │ │ 数据率: ~170KB/帧 × 60fps ≈ 80Mbps │ │ │ │
│ │ │ │ 或使用SPI (10-50Mbps) │ │ │ │
│ │ │ └──────────────────────────────────────────────────────┘ │ │ │
│ │ └────────────────────────────────────────────────────────────┘ │ │
│ │ │ │
│ │ 4. 大灯模块 → ADB ECU:状态反馈 │ │
│ │ ┌────────────────────────────────────────────────────────────┐ │ │
│ │ │ CAN ID 0x2F1 (100ms周期) │ │ │
│ │ │ Byte 0: ADB运行状态 (0=OFF 1=ON 2=故障 3=降级) │ │ │
│ │ │ Byte 1: LED故障位图 (每bit代表一组LED) │ │ │
│ │ │ Byte 2: 大灯温度 (°C, 偏移-40) │ │ │
│ │ │ Byte 3: 当前远光开启比例 (0-100%) │ │ │
│ │ └────────────────────────────────────────────────────────────┘ │ │
│ │ │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ ADB启用条件判断(所有条件必须满足): │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ ✓ 灯光开关处于AUTO或远光位置 │ │
│ │ ✓ 环境光低于阈值(<200 lux,即天黑后) │ │
│ │ ✓ 车速 > 30 km/h(低速不激活,避免城市频繁动作) │ │
│ │ ✓ 不在倒挡 │ │
│ │ ✓ 前视摄像头状态正常 │ │
│ │ ✓ ADB功能未被驾驶员手动关闭 │ │
│ │ ✓ 无系统故障 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
└─────────────────────────────────────────────────────────────────────────┘七、ADB的挑战与难点
text
┌─────────────────────────────────────────────────────────────────────────┐
│ ADB 工程挑战 │
│ │
│ 1. 检测准确性 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ 误报 (False Positive): │ │
│ │ - 路灯被误判为对向车 → 不必要的遮蔽 │ │
│ │ - 护栏反射被误判为尾灯 │ │
│ │ - 广告牌亮光被误判 │ │
│ │ → 降低驾驶员照明体验 │ │
│ │ │ │
│ │ 漏报 (False Negative): │ │
│ │ - 暗色车辆未检测到 → 未遮蔽 → 眩目 │ │
│ │ - 摩托车单灯未检测到 │ │
│ │ - 弯道后隐藏的车辆 │ │
│ │ → 安全风险 │ │
│ │ │ │
│ │ 行业目标:检测率>99.5%,误报率<0.5% │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 2. 坐标变换精度 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ 难点:摄像头视角 → 路面位置 → LED像素位置(三重变换) │ │
│ │ - 摄像头安装误差(需要标定,精度±0.5°) │ │
│ │ - 大灯安装误差(需要标定) │ │
│ │ - 车身动态俯仰(加速/制动引起的姿态变化) │ │
│ │ - 道路坡度变化 │ │
│ │ │ │
│ │ 如果映射误差>1°: │ │
│ │ → 遮蔽区域偏移 → 未完全遮蔽对向车 → 仍然眩目 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 3. 极端场景 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ - 大雨/大雪:摄像头视野受阻 │ │
│ │ - 浓雾:远光反射严重,ADB需切换雾灯模式 │ │
│ │ - 山路连续弯道:目标频繁进出视野 │ │
│ │ - 多车道高速:同时处理8+目标 │ │
│ │ - 隧道出入口:光照急剧变化 │ │
│ │ │ │
│ │ 降级策略:检测到异常 → 切换为保守模式(降低远光比例或关闭ADB) │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 4. EMC与热管理 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ - 高功率LED阵列(总功率100W+)产生电磁干扰 │ │
│ │ - PWM调光频率需要避开CAN/LIN通信频段 │ │
│ │ - LED结温管理(>120°C降额保护) │ │
│ │ - DMD芯片散热(高速翻转产生热量) │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
│ 5. 功能安全 │
│ ┌──────────────────────────────────────────────────────────────────┐ │
│ │ - ADB故障时的安全状态 = 切换为标准近光 │ │
│ │ - 不允许故障导致"全远光不遮蔽" │ │
│ │ - ASIL-A/B 等级(取决于OEM要求) │ │
│ │ - 需要独立的安全监控通道 │ │
│ └──────────────────────────────────────────────────────────────────┘ │
│ │
└─────────────────────────────────────────────────────────────────────────┘八、总结图谱
text
ADB系统
│
┌───────────────────┼───────────────────┐
│ │ │
技术代际 系统架构 工程实现
│ │ │
┌───────┼───────┐ ┌───────┼───────┐ ┌───────┼───────┐
│ │ │ │ │ │ │ │ │
HBA 矩阵LED DMD 感知 决策 执行 总线通信 标定 安全
(全开关) (5-260 (130万 (摄像头) (遮蔽 (LED/ (CAN/ (摄像头 (ASIL
像素) 像素) 算法) DMD) LIN/ +大灯) 降级)
LVDS)ADB核心价值:���夜间行车中,让驾驶员始终拥有远光级别的照明视距(200-300m),同时不会眩目任何其他道路使用者。这是通过摄像头实时检测前车/对向车位置,经过坐标变换映射到LED/DMD像素上,精确关闭会造成眩目的光束区域来实现的。ADB从"全开全关"的HBA演进到130万像素的DLP投影大灯,分辨率和功能不断提升,已从单纯的防眩目工具发展为集照明、投影、交互于一体的智能光学平台.