目录
[一、核心思想:如何让水温刚好 50℃?](#一、核心思想:如何让水温刚好 50℃?)
PID 控制器是工业控制领域应用最广泛的算法,没有之一。它就像一位经验丰富的"老司机",能通过**比例(P)、积分(I)、微分(D)**三个动作的配合,让系统(如温度、速度、水位)精准且稳定地达到你设定的目标值。
一、核心思想:如何让水温刚好 50℃?
假设你要用 PID 控制热水器,把水温稳定在 50℃。算法会这样工作:
-
P - 比例控制(现在差多少)
-
动作:误差越大,动作越猛。如果现在 30℃,差 20℃,它会猛加热;接近 50℃时,力度会减小。
-
缺点:容易"刹不住车"。因为快到目标时力度变小,系统可能永远无法完全消除误差(静差),或者在目标值附近来回震荡。
-
-
I - 积分控制(过去欠多少)
-
动作:专门消除 P 控制留下的"静差"。它会累加历史误差,只要还有一点点没达到目标,它就会持续微调,直到误差彻底归零。
-
缺点:反应慢,如果调得太强,会导致系统反应迟钝或出现超调(冲过头)。
-
-
D - 微分控制(未来怎么变)
-
动作:具有"预见性"。它看的是误差的变化趋势(导数)。如果发现温度上升得太快,它会提前"踩刹车",防止系统冲过头和震荡。
-
缺点:对噪声(信号干扰)非常敏感,调不好容易放大干扰。
-
形象比喻:
-
P:眼睛看着目标,差得远就跑快点。
-
I:心里记着旧账,差一分都不行。
-
D:预判惯性,跑太快了提前减速。
二、数学表达与代码实现
PID 的连续时间公式为:

在实际的嵌入式或计算机控制中,我们通常使用离散化的增量式 PID(更易实现且抗积分饱和):
// 定义PID结构体
typedef struct {
float Kp, Ki, Kd; // 三个参数
float integral; // 积分累加值
float prev_error; // 上一次的误差
} PID;
// PID计算函数(增量式)
float PID_Calculate(PID* pid, float setpoint, float feedback) {
float error = setpoint - feedback;
// P项
float P_out = pid->Kp * error;
// I项(累加)
pid->integral += error;
float I_out = pid->Ki * pid->integral;
// D项(差分)
float derivative = error - pid->prev_error;
float D_out = pid->Kd * derivative;
// 更新历史误差
pid->prev_error = error;
// 总输出 = P + I + D
return P_out + I_out + D_out;
}三、参数整定:如何调出好性能?
调整 Kp, Ki, Kd这三个参数是 PID 应用的关键,俗称"调参"。你可以遵循以下经验法则:
-
先 P 后 I 再 D:先设 Ki=0,Kd=0,只调 Kp。
-
调 P:增大 Kp直到系统出现临界震荡(开始轻微抖动),然后取此时 Kp的 50%-60% 作为最终值。
-
调 I:加入积分,从小开始增大 Ki,直到静差被消除,且没有明显超调。
-
调 D:最后加入微分,增大 Kd来抑制震荡,让曲线更平滑。
实用口诀 :参数整定找最佳,从小到大顺序查。先是比例后积分,最后再把微分加。
四、进阶:必须注意的"坑"
PID 虽然经典,但直接使用裸算法会遇到实际问题:
-
积分饱和(Integral Windup) :当输出达到硬件极限(如电机已满转)但误差还在时,积分项会疯狂累加,导致系统"卡死"。解决方案:必须对积分项进行限幅或使用抗饱和算法。
-
微分冲击 :设定值(Setpoint)突变时,微分项会瞬间算出巨大的值,导致控制量突变。解决方案:对设定值进行平滑滤波,或只在反馈值上做微分。
五、应用场景
-
无人机:保持姿态稳定。
-
恒温箱:精确控制温度。
-
汽车巡航:保持设定车速。
-
机器人:关节位置控制。
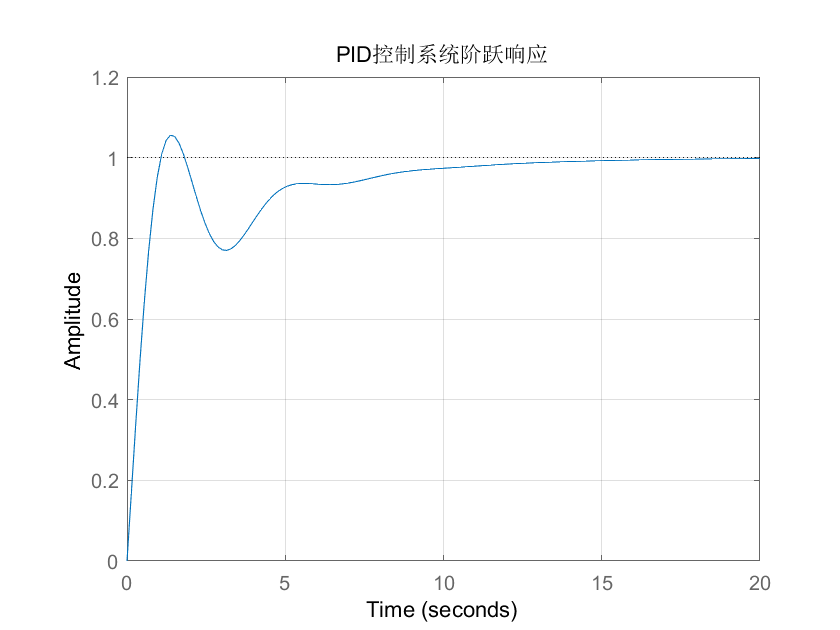
六、MATLAB实现简易PID
%% 使用MATLAB自带的PID控制器
clear all; close all; clc;
% 被控对象
sys = tf(1, [1, 0.4, 1]); % 二阶系统
% 创建PID控制器
Kp = 2.5;
Ki = 0.8;
Kd = 1.2;
C = pid(Kp, Ki, Kd);
% 闭环系统
T = feedback(C*sys, 1);
% 阶跃响应
figure;
step(T, 20);
grid on;
title('PID控制系统阶跃响应');
% 显示控制器信息
C
stepinfo(T)命令行窗口:
C =
1
Kp + Ki * --- + Kd * s
s
with Kp = 2.5, Ki = 0.8, Kd = 1.2
Continuous-time PID controller in parallel form.
ans =
包含以下字段的 struct:
RiseTime: 0.7866
SettlingTime: 11.2001
SettlingMin: 0.7701
SettlingMax: 1.0558
Overshoot: 5.5840
Undershoot: 0
Peak: 1.0558
PeakTime: 1.3678