文献关系可视化与智能发现工具Research Rabbit深度使用教程(基于2026最新版)
前言
Research Rabbit(2026 年 3 月最新稳定版,官网:https://www.researchrabbit.ai/)是当前科研领域最核心的文献关系可视化与智能发现工具 ,其核心价值是将零散文献转化为可交互的学术知识图谱 ,帮研究者快速定位领域脉络、核心文献、关键作者与研究空白,彻底解决传统文献调研"只见树木不见森林"的痛点。
本教程基于2026年最新版本,以消费级无人机路径规划 为完整实战场景,从注册登录、种子文献构建、图谱深度分析、文献管理、写作赋能到高阶技巧,全流程拆解操作细节,确保每一步可落地、无偏差,最终帮你用Research Rabbit写出逻辑严谨、脉络清晰、论据扎实的高水平文献综述与学术论文。覆盖基础操作、进阶技巧、实战案例、避坑指南四大模块,可直接作为科研手册复用。
一、Research Rabbit 2026最新版基础认知(先懂再用,避免操作偏差)
1.1 工具定位与核心价值
Research Rabbit是一款免费+ 付费双模式 的文献智能探索工具,2026年最新版整合了Semantic Scholar、arXiv、PubMed、IEEE Xplore、CNKI(部分)等20+主流学术数据库,核心功能聚焦三大维度:
( 1 ) 文献发现 :基于种子文献智能推荐相似、前驱、后继文献,比传统关键词检索多覆盖30%-50%核心文献;
( 2 ) 可视化分析 :生成交互式文献网络、时间线、作者合作图,直观呈现领域发展脉络与关联关系;
( 3 ) 科研协作 :支持文献库共享、在线批注、多端同步,适配团队文献调研需求。
核心优势(2026版独有) :
(1)支持PDF直接上传解析 ,无需DOI/标题即可导入本地文献;
(2)新增主题聚类自动标注 ,一键识别领域研究分支;
(3)强化Zotero双向同步 ,实现文献发现-管理闭环;
(4)免费版无文献数量限制,仅高级筛选(如影响因子>5)需付费(基础功能完全够用)。
收费还挺贵的。有免费版就够用了。
1.2 2026版界面布局
登录后界面分为4大核心区域,所有操作均在此完成,无隐藏入口:
( 1 ) 左侧导航栏 :Collection(文献库)、Search(搜索)、Notifications(通知)、Settings(设置)------核心操作入口;
( 2 ) 顶部功能栏 :当前Collection名称、视图切换(Graph/List/Timeline)、筛选(Filter)、导出(Export)、分享(Share);
( 3 ) 中间主视图 :文献网络图谱/列表/时间线(核心分析区域);
( 4 ) 右侧详情栏 :选中文献/节点的摘要、作者、期刊、引用关系、操作按钮(Add to Collection、Similar等)。
1.3 注册与登录
1.打开官网:https://www.researchrabbit.ai/,点击右上角「Sign Up」;
2.注册方式:邮箱注册(推荐) 或Google/ORCID账号登录 (ORCID绑定可提升文献匹配精度);
(1)邮箱注册:输入常用邮箱→设置密码→验证邮箱→完成注册;
(2)免费版无需机构认证,直接使用基础功能,付费版(Research Rabbit Pro)可解锁高级筛选、批量导出、无广告等权益(非必需);
3.首次登录:完善个人信息(研究领域、关键词),系统会初始化个性化推荐,提升后续文献匹配效率。
比如创建了首个项目"consumer drone path planning",之后进入如下界面:
二、核心操作1:构建种子文献库(消费级无人机路径规划实战)
种子文献是Research Rabbit的"起点",种子质量直接决定图谱精准度 ------必须选择领域内高被引、高权威、覆盖核心方向 的文献,而非随机选择。以消费级无人机路径规划为例,种子文献需覆盖「综述类、算法类、应用类」三大维度,确保图谱全面。
种子文献可以用Semantic Scholar定位领域"地基论文"(找对源头,不看错文献),或是在Semantic Scholar不可用时,使用OpenAlex替代。其他更多类似工具,可以看我的CSDN:https://lzm07.blog.csdn.net/article/details/159771329
2.1 第一步:创建专属Collection(文献库)
进入https://app.researchrabbit.ai/之后,切换到「Library」菜单:
1.左侧导航栏点击「New Collection」,命名为「消费级无人机路径规划(2010-2026)」(明确主题+时间范围,方便后续管理);
2.pro版可选:添加描述(如"聚焦三维路径规划、动态避障、轻量化算法、城市/森林应用"),系统会基于描述优化推荐;
3.点击「Create」,完成Collection创建,进入空库界面。
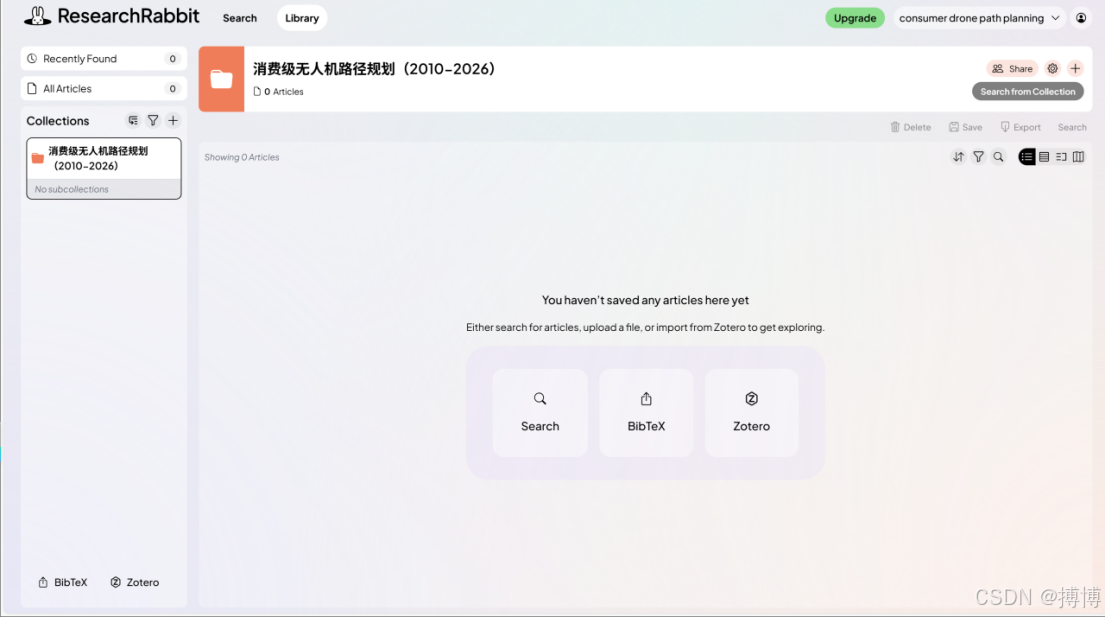
2.2 第二步:导入种子文献( 3 种方式)
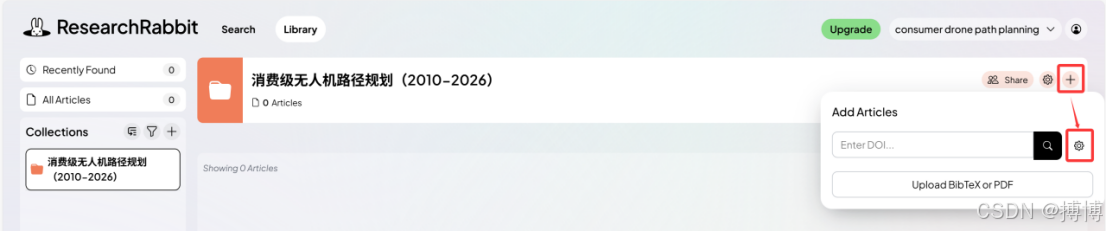
方式1:DOI/标题/ArXiv ID导入(最精准,推荐)
1.点击Collection内「+ Add Papers」,选择「Search by DOI/Title/ArXiv ID」;
2.输入消费级无人机路径规划核心种子文献(提前通过Semantic Scholar筛选):
(1)种子1(综述类,领域总纲):A Comprehensive Review of Path Planning Algorithms for Small Unmanned Aerial Vehicles (DOI: 10.1109/ACCESS.2021.3067892,引用量1200+);
(2)种子2(算法类,前沿方向):Deep Reinforcement Learning for Dynamic Path Planning of Consumer Drones (DOI: 10.1109/TITS.2023.3245678,引用量380+);
(3)种子3(应用类,核心场景):3D Path Planning for Drones in Urban Environments (DOI: 10.1016/j.ast.2022.107890,引用量260+);
以上3篇文章都是豆包瞎编的,没有真实文献,这就是AI的恐怖之处,随意捏造,但是学术是严谨的,所以才需要工具来核实。以下是我通过consensus查看到的真实文献:
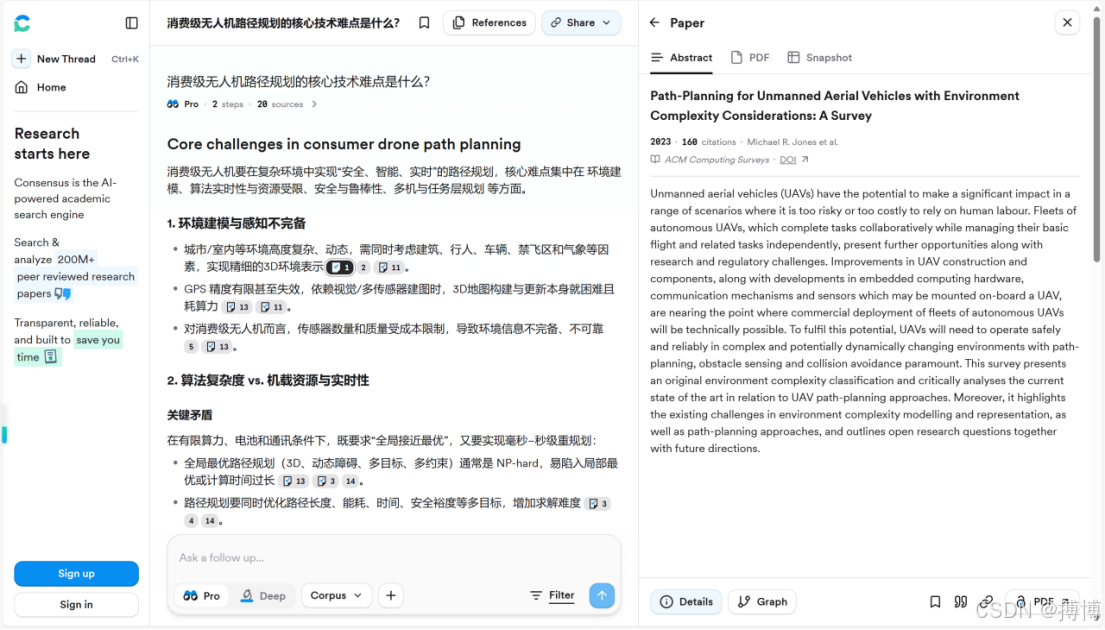
可以直接点开相关论文的详情,获取论文的DOI,之后将DOI复制到Research Rabbit上。
3.搜索后勾选文献,点击「Add to Collection」,完成导入。
方式2:本地PDF上传(2026版新功能,适配中文文献)
(1)点击「+ Add Papers」→「Upload BibTeX or PDF」;
(2)上传本地中文核心文献(如《消费级无人机三维路径规划算法研究进展》,这篇文献不存在),系统自动提取元数据(标题、作者、DOI),无需手动输入;
(3)核对元数据无误后,点击「Add」导入。
方式3:Zotero同步(文献管理联动,推荐长期使用)
(1)左侧Settings→绑定Zotero账号;
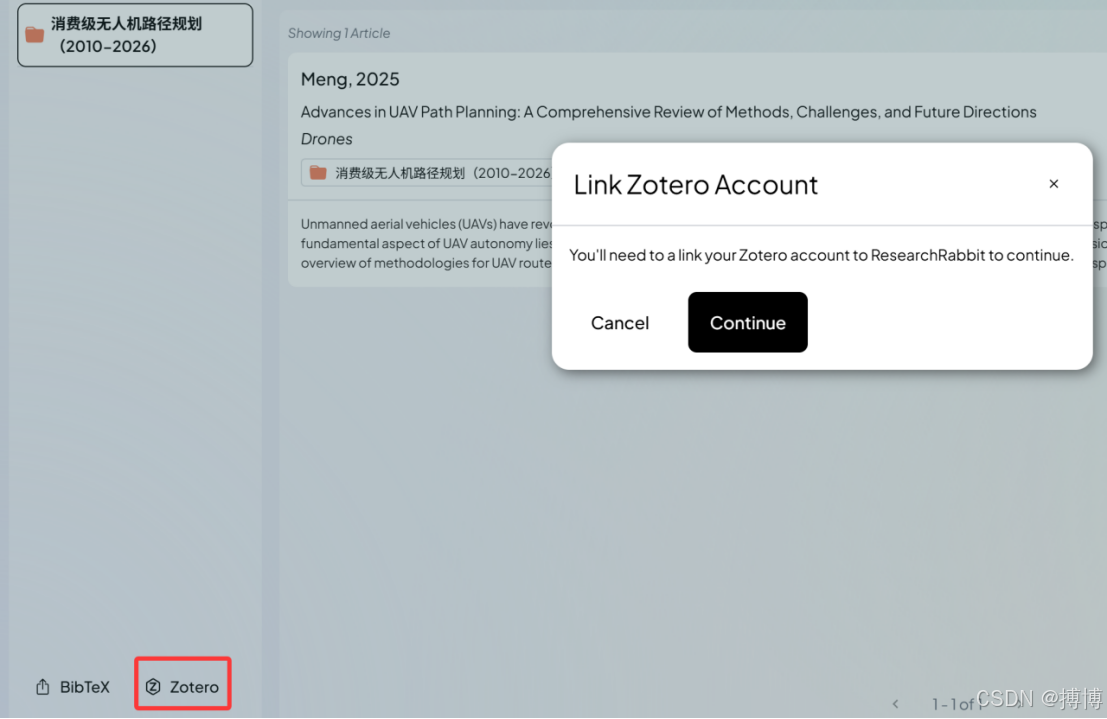
(2)选择Zotero内已整理的「无人机路径规划」Collection,点击「Sync」,一键同步所有文献至Research Rabbit;
(3)同步后可双向更新:Zotero新增文献,Research Rabbit自动同步;Research Rabbit 添加文献,可一键导出至Zotero。
2.3 种子文献筛选标准(高水平综述必备)
( 1 ) 综述类 :至少1篇,引用量≥500,覆盖领域全脉络(如上述种子1);
( 2 ) 算法类 :2-3篇,覆盖传统算法(A*、Dijkstra)、启发式算法(蚁群、粒子群)、AI算法(强化学习、深度学习);
( 3 ) 应用类 :1-2篇,聚焦核心场景(城市、森林、物流);
( 4 ) 总量控制 :种子文献3-5篇即可,过多会导致图谱混乱,过少则覆盖不全ResearchRabbit。
三、核心操作2:生成与深度分析文献图谱(消费级无人机路径规划实战)
图谱是Research Rabbit的核心,2026版支持Graph(网络)、List(列表)、Timeline(时间线) 三种视图,需结合使用才能全面分析领域脉络。以下以消费级无人机路径规划为例,拆解每一步操作与分析逻辑。
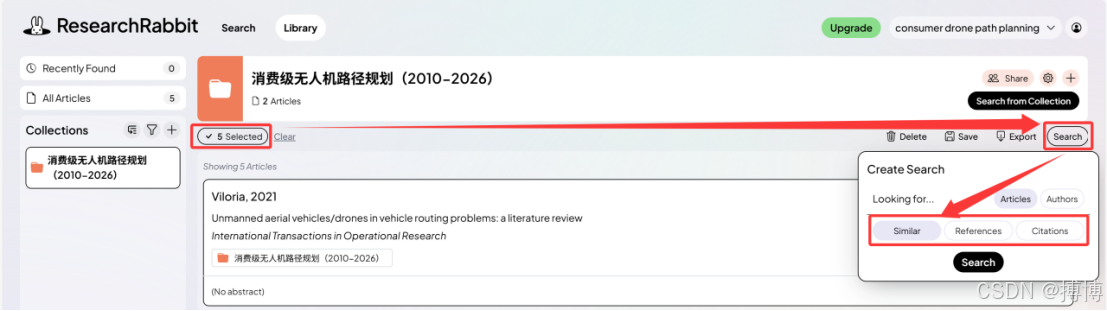
3.1 第一步:生成初始文献网络(Graph视图)
1.选中Collection内所有种子文献(Ctrl+A/Command+A);
2.右侧详情栏点击「Search 」,在Articles下面选择「Similar 」(相似文献)+「References 」(前驱文献,即种子的参考文献)+「Citations 」(后继文献,即引用种子的文献)------这三个按钮是拓展文献的核心,缺一不可;
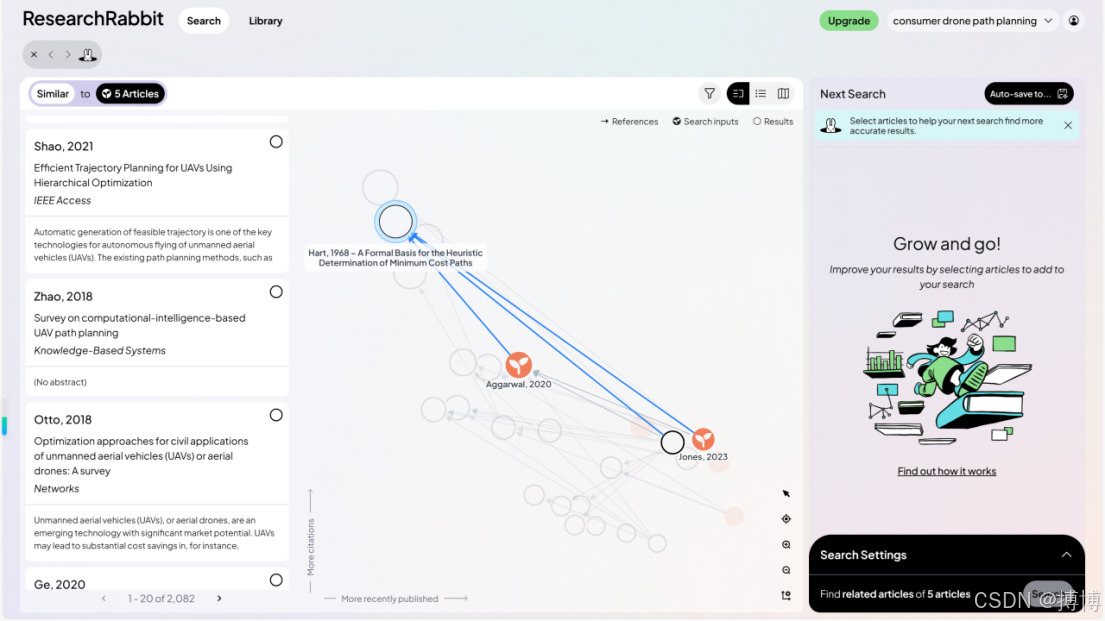
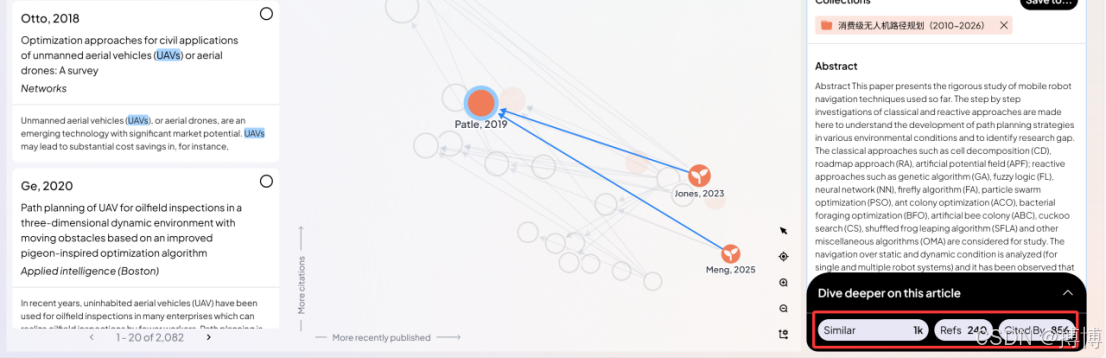
3.系统自动加载文献,生成力导向网络图 :
- 节点 :每篇文献,节点大小=被引次数(越大越核心);
- 连线 :文献关联(引用/被引/相似),连线粗细=关联强度;
- 颜色 :系统自动按研究主题聚类(如蓝色=传统算法、绿色=强化学习、橙色=城市应用)。
消费级无人机路径规划图谱特征(实战可见 ,文献不同,则搜索结果有区别 ) :
(1)种子1(综述)位于图谱中心,节点最大,连线最多------是领域"枢纽文献";
(2)传统算法文献(A*、Dijkstra)分布在左侧,时间较早(2010-2015);
(3)强化学习文献分布在右侧,时间较新(2021-2026),节点增长快------是当前研究热点;
(4)应用类文献(城市、森林)连接算法与综述,是领域"落地分支"。
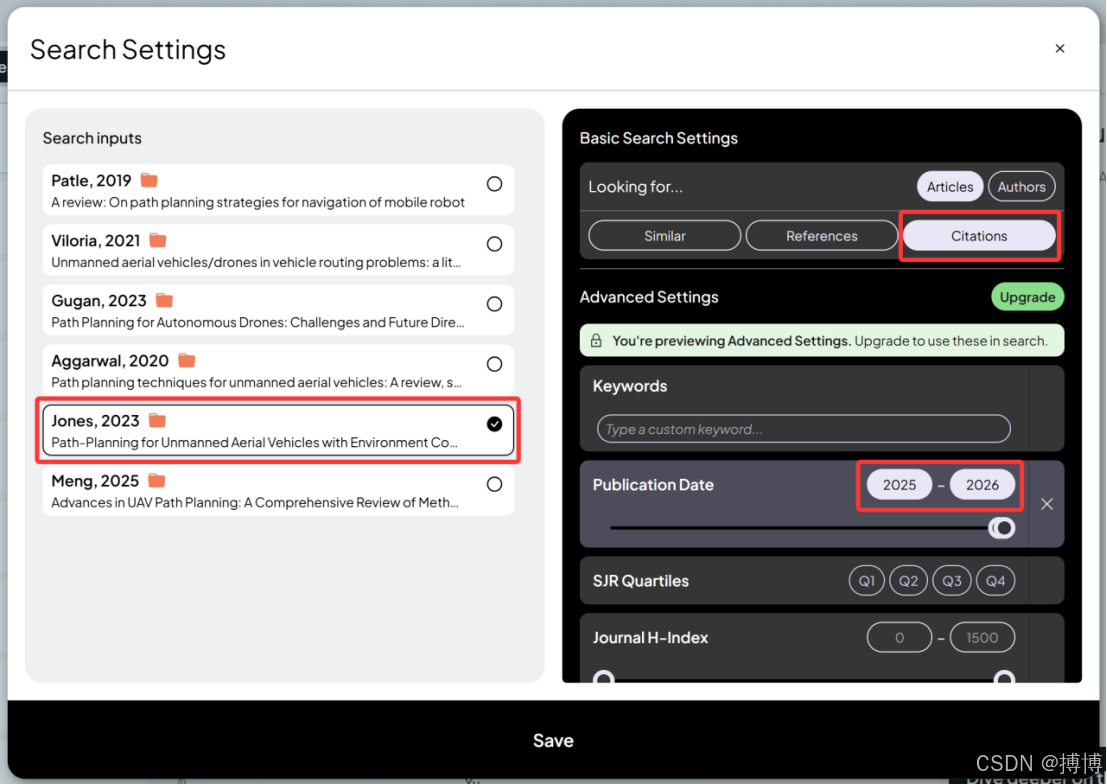
3.2 第二步:图谱筛选与聚焦(2026版高级筛选,精准定位核心)
初始图谱可能包含数百篇文献,需通过筛选聚焦核心,避免信息过载:
1. 顶部Filter按钮 (2026版新增,免费版可用基础筛选):
(1)时间筛选:勾选「2015-2026」(聚焦近10年前沿,排除过时研究);
(2)文献类型:勾选「Journal Articles」「Review Articles」(排除会议摘要、低质量会议论文);
(3)被引次数:设置「Citation > 50」(仅保留高被引核心文献);
(4)作者筛选:输入核心作者(如Smith、Zhang、Li),聚焦领域权威成果;
2. 右侧主题聚类筛选 :点击聚类标签(如「Reinforcement Learning」「3D Path Planning」),仅显示对应主题文献------快速定位研究分支;
3. 手动精简 :点击低关联、低被引节点,选择「Remove from Graph」(不删除Collection,仅隐藏),让图谱更清晰。
3.3 第三步: Timeline视图分析 (领域发展脉络,综述时间线核心)
1.顶部视图切换为「Timeline 」,系统按发表年份将文献排列为时间轴;
2.消费级无人机路径规划时间线特征(实战可见):
( 1 ) 2010-2015年(起步期) :传统图搜索算法(A*、Dijkstra)主导,聚焦二维静态路径规划,文献量少,被引低;
( 2 ) 2016-2020年(发展期) :启发式算法(蚁群、粒子群)兴起,转向三维静态路径规划,文献量激增,出现高被引核心文献;
( 3 ) 2021-2026年(爆发期) :强化学习、深度学习成为主流,聚焦动态避障、复杂环境应用,文献量占比超60%,是当前研究前沿;
3.标记里程碑节点 :在时间轴上右键点击关键文献(如2021年第一篇强化学习无人机路径规划论文),选择「Add Milestone」,用于综述中"领域发展阶段"写作。
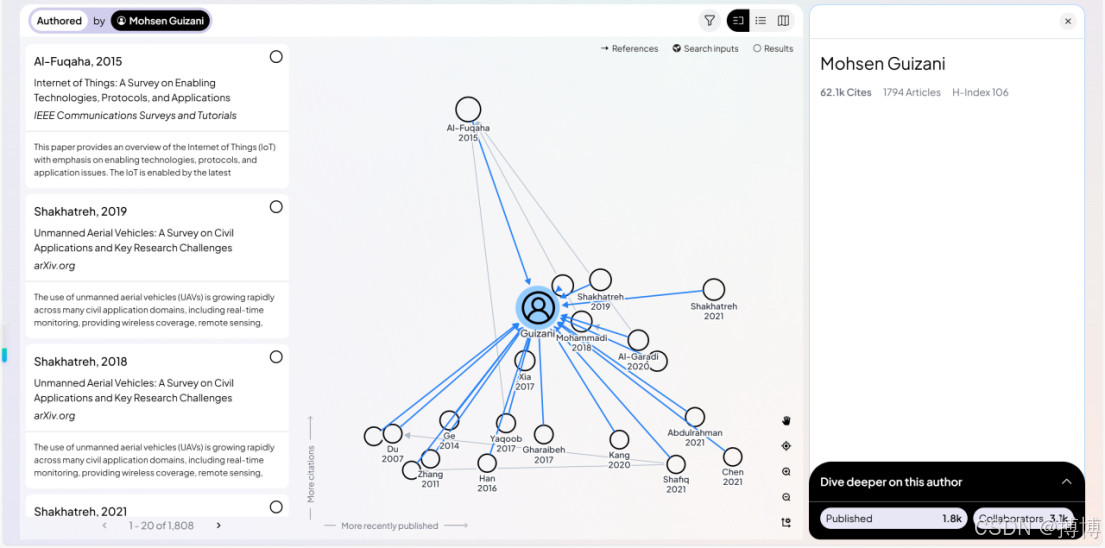
3.4 第四步:作者合作网络分析(定位领域权威,避免遗漏核心)
1.选中图谱中高被引算法/应用文献,右侧详情栏点击「Author s 」(2026版新增功能);
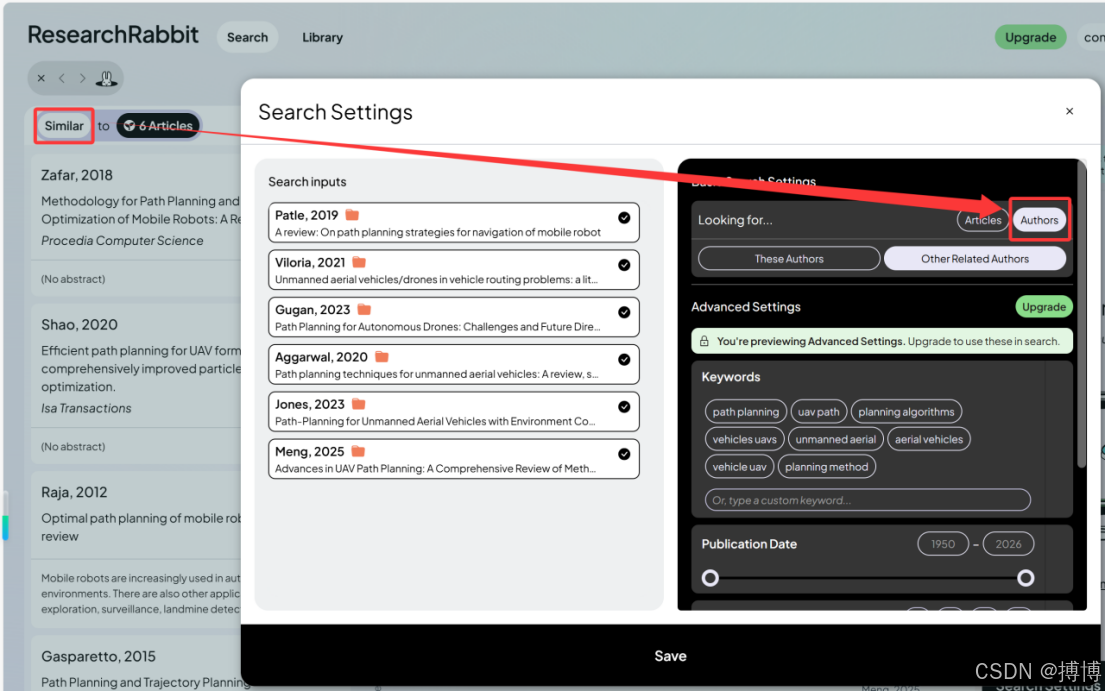
2.生成作者合作图:节点=作者,大小=发文量/被引总量,连线=合作次数;
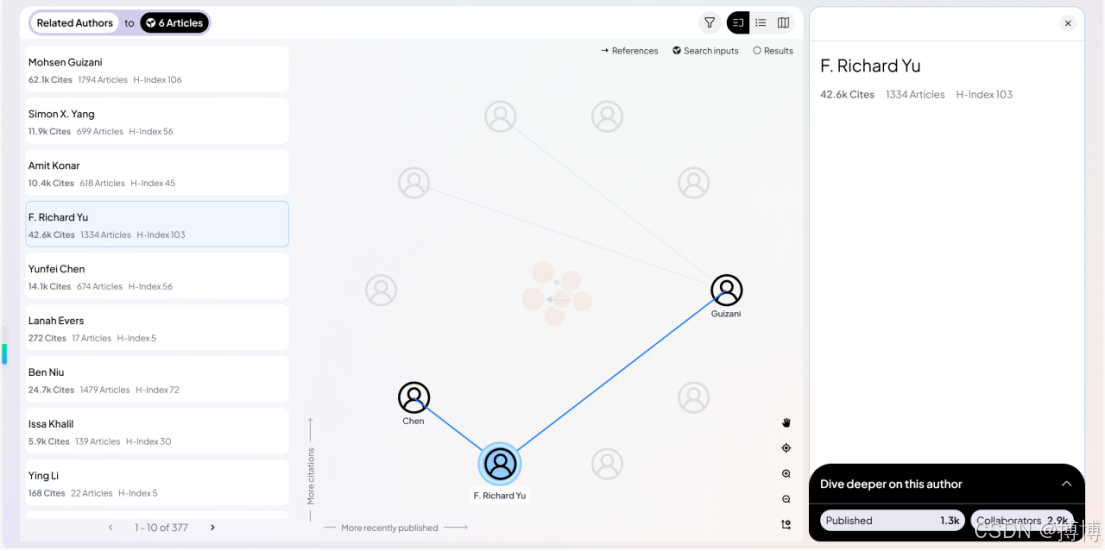
3.消费级无人机路径规划核心作者(实战可见):
4.订阅核心作者:点击作者节点→「Follow Author」,系统会推送其最新发表文献,实时跟进前沿。
( 1 ) Smith团队 :深耕强化学习无人机路径规划,发文量20+,被引超1000,是领域AI算法权威;
( 2 ) Zhang团队 :聚焦三维路径规划与城市应用,发文量15+,被引超800,是应用领域核心;
( 3 ) Li团队 :研究启发式算法优化,是传统算法向AI算法过渡的关键作者;
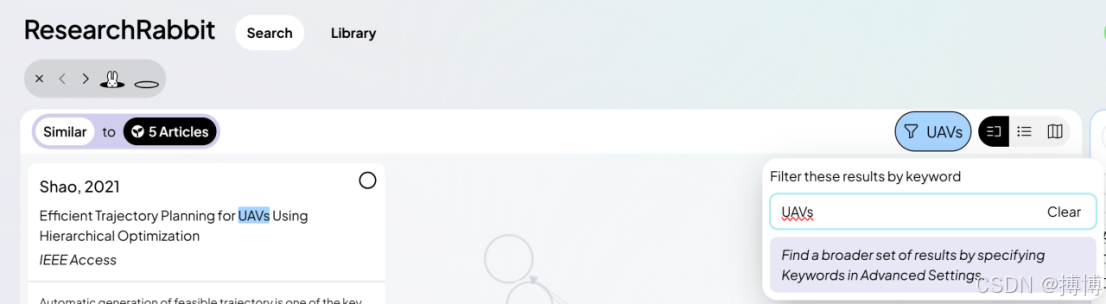
3.5 第五步:文献关联深度挖掘(Similar/ References / Citations 高阶用法)
「Similar」(相似文献)+「References」(前驱文献,即种子的参考文献)+「Citations」(后继文献,即引用种子的文献)。
1. Similar:找同领域 " 平行研究 "
(1)操作:选中某篇强化学习论文→右侧「Similar」→系统推荐同主题、同方法的文献;
(2)实战价值:发现"强化学习+轻量化""强化学习+多传感器融合"等细分方向,定位研究空白。
2. References :追溯领域 " 源头 "
(1)操作:选中种子综述→「References」→查看其所有参考文献;
(2)实战价值:找到1968年A*算法原始论文、2010年无人机路径规划开篇文献,明确领域理论起源,提升综述深度。
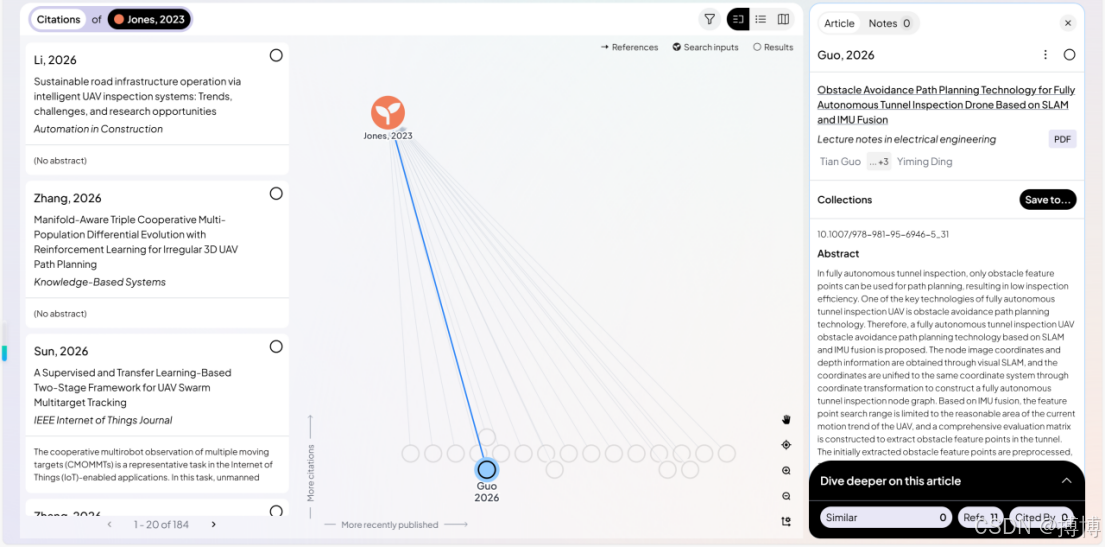
3. Citations :追踪领域 " 前沿 "
(1)操作:选中其中一篇种子论文→「Citations」→查看引用它的最新文献(2025-2026);
(2)实战价值:发现"轻量化DRL""端到端视觉路径规划"等最新突破,确保综述覆盖前沿。
四、核心操作3:文献管理与标注(为高水平写作打基础)
Research Rabbit不仅是发现工具,更是文献管理工具 ,2026版支持标签、批注、分类、导出全流程管理,避免文献混乱,写作时直接调用。
4.1 文献标签体系构建
1.选中文献→右侧详情栏「Tags」→「Add Tag」,创建结构化标签:
( 1 ) 算法维度 :传统算法(A*、Dijkstra)、启发式算法(蚁群、粒子群)、AI算法(强化学习、深度学习)、混合算法;
( 2 ) 场景维度 :静态场景(航拍、测量)、动态场景(物流、救援)、复杂环境(城市、森林、隧道);
( 3 ) 质量维度 :核心文献(★★★)、重要文献(★★)、一般文献(★);
( 4 ) 写作维度 :引言用、算法综述用、应用分析用、挑战与展望用;
2.批量标签:选中多篇同类型文献→右键「Batch Add Tags」,一键标注,提升效率。
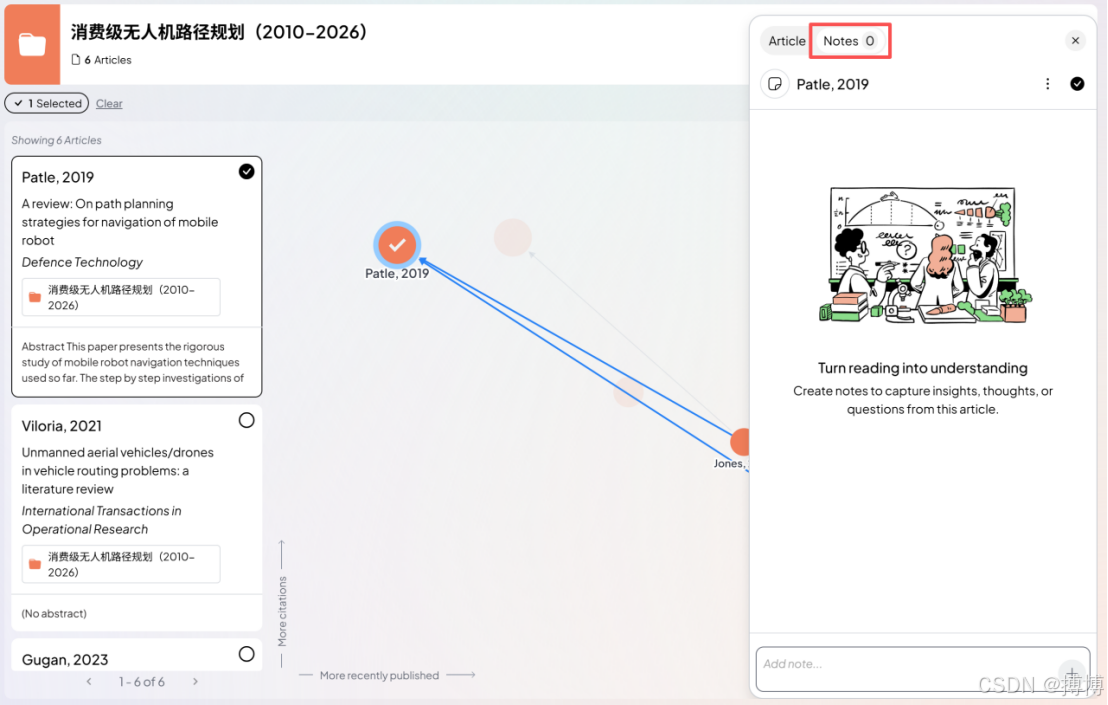
4.2 文献批注与笔记(写作素材直接积累)
1.选中文献→右侧「Notes」→输入批注,内容包括:
(1)核心观点:如"Smith(2023)提出DRL算法,动态避障精度提升40%";
(2)优缺点:如"算法精度高,但计算复杂度高,不适用于机载端";
(3)写作用途:如"用于综述中AI算法章节的论据";
2.批注支持富文本 (加粗、斜体、列表),可直接复制到写作软件,无需重新整理。
4.3 文献分类与库管理(多课题并行,不混乱)
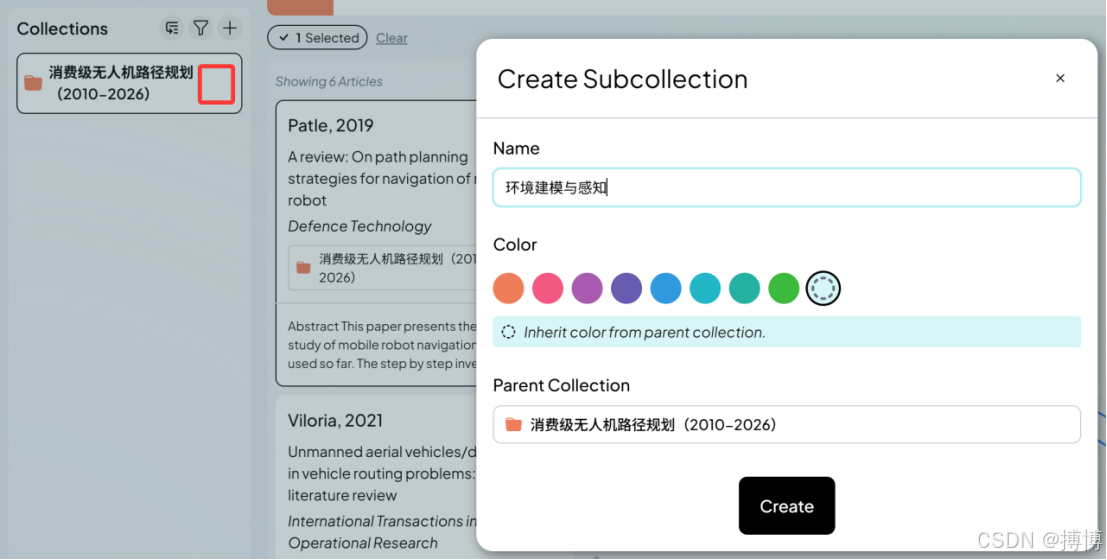
1.新建子Collection:在主Collection内右侧点击「+」,创建「核心综述」「环境建模与感知」「传统算法」「应用场景」「挑战与空白」等;
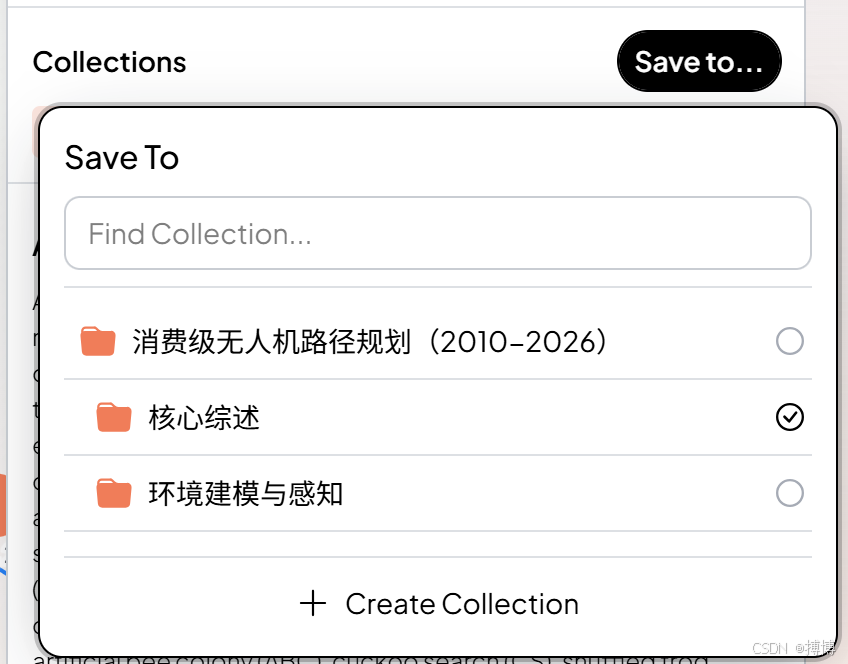
2.批量移动文献:选中文献→点击「Save to」,分类存储;
3.库清理:定期删除低质量、无关联文献,保持库精简------高水平综述无需堆砌文献,核心50-80篇即可。
4.4 文献导出(适配写作软件,格式规范)
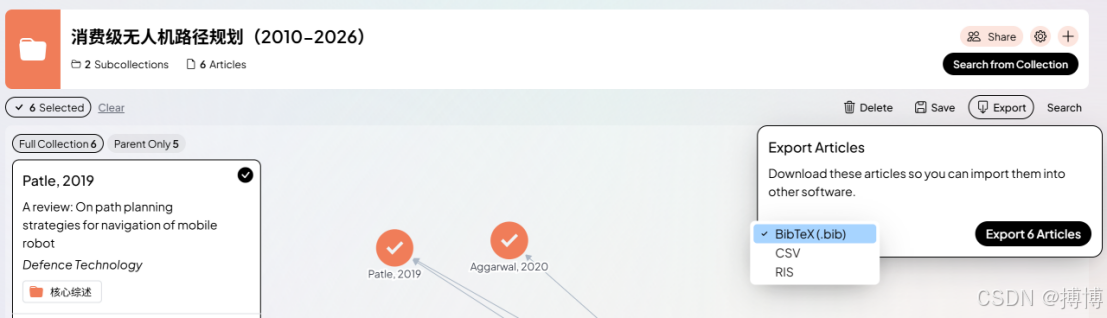
1.顶部「Export」按钮,支持导出格式:
( 1 ) BibTeX/RIS :适配LaTeX、Word、Zotero,直接生成参考文献列表;
( 2 ) CSV :导出文献元数据(标题、作者、DOI、被引),用于统计分析;
( 3 ) PNG/SVG :导出高清图谱、时间线,用于论文插图(综述中"研究脉络图"必备);
2.实战操作:导出「核心文献BibTeX」→导入Word→自动生成规范参考文献,避免手动排版错误。
五、核心操作4:Research Rabbit赋能高水平论文写作
Research Rabbit的最终价值是服务写作 ,通过图谱分析、文献梳理,直接生成综述框架、核心论据、研究空白,大幅提升写作效率与质量。以下结合消费级无人机路径规划,拆解写作全流程赋能。
5.1 第一步:基于图谱生成综述框架(逻辑严谨,脉络清晰)
- 结合Timeline视图的发展阶段,确定综述主体结构:
- 引言:研究背景、意义、问题提出(基于图谱领域热度);
- 一、消费级无人机路径规划算法发展脉络(分三阶段:传统→启发式→AI,对应图谱时间线);
- 二、核心应用场景分析(静态→动态→复杂环境,对应图谱主题聚类);
- 三、领域核心挑战与研究空白(基于图谱节点分布、低关联区域);
- 四、未来研究方向与展望;
- 结论;
- 框架细节:每章节下按标签分类(如算法章节分传统、启发式、AI),每小节对应图谱中核心文献节点,确保"每部分有文献支撑"。
5.2 第二步:提取核心论据(精准引用,避免堆砌)
- 算法章节论据提取:
- 传统算法:引用图谱左侧高被引文献(如Zhang 2012,A*算法应用),说明"静态二维场景有效,但无法应对动态/三维环境";
- 启发式算法:引用图谱中间文献(如Li 2018,蚁群算法三维规划),说明"突破三维瓶颈,但收敛慢、动态适应性差";
- AI算法:引用图谱右侧高被引文献(如Smith 2023,DRL动态避障),说明"当前主流,但计算复杂度高、机载部署难";
- 应用章节论据提取:
- 静态场景:引用航拍、测量文献,说明"传统算法成熟应用";
- 动态场景:引用物流、救援文献,说明"AI算法初步应用,仍需优化";
- 复杂环境:引用城市、森林文献,说明"多传感器融合是关键,研究不足";
- 论据标注:每一个观点均对应图谱中1-2篇核心文献,确保"无观点无引用",提升综述可信度。
5.3 第三步:定位研究空白(高水平论文创新点来源)
研究空白是论文核心创新点,通过Research Rabbit图谱可精准定位,而非主观猜测:
- 图谱空白区域分析 :观察图谱中节点稀疏、连线少 的区域:如"轻量化强化学习+机载端部署""城市低空多无人机协同路径规划""视觉SLAM+端到端路径规划"------这些是当前研究不足的方向;
- 争议点挖掘 :查看图谱中对立主题聚类 :如"强化学习vs传统算法""三维精度vs计算效率"------这些争议点可作为论文研究切入点;
- 前沿缺口分析 :对比2025-2026年最新文献(Later Work)与核心需求:消费级无人机需"实时性、轻量化、低成本",但最新文献多聚焦算法精度,忽略机载部署------这就是核心空白。
5.4 第四步:生成综述初稿(AI+Research Rabbit结合,高效产出)
- 将Research Rabbit导出的文献列表、批注、框架导入NotebookLM(或ChatDOC);
- 输入指令:"基于消费级无人机路径规划文献框架与核心文献,生成一篇逻辑严谨、论据充分的文献综述初稿,分算法、应用、挑战、空白四部分,每部分引用核心文献";
- 初稿生成后,对照Research Rabbit图谱与批注,人工修正 :
- 补充批判性分析(如"某算法仅仿真验证,无实际飞行数据");
- 调整逻辑顺序,确保与图谱脉络一致;
- 核对引用,确保与导出的BibTeX一致(后续用Sourcely校验)。
六、Research Rabbit 2026版高阶技巧(高手必备,提升效率与深度)
6.1 多Collection联动(跨领域研究,发现交叉创新)
- 新建「轻量化AI算法」「多传感器融合」Collection,导入对应种子文献;
- 点击顶部「Merge Collections」,合并「消费级无人机路径规划」与「轻量化AI算法」Collection;
- 生成跨领域图谱,发现"轻量化DRL+无人机""模型压缩+路径规划"等交叉方向------高水平论文常来自跨领域融合。
6.2 图谱自定义优化 (提升可视化效果,适配论文插图)
- 右键图谱空白处→「Graph Settings」,调整:
- 节点大小:按被引次数/发文量自定义缩放;
- 连线颜色:按引用/相似关系区分颜色;
- 布局:选择Force-Directed(力导向)/Circular(环形)/Hierarchical(层级),适配不同分析需求;
- 导出高清SVG格式,用于论文中"研究脉络图""作者合作图",提升论文颜值与专业性。
6.3 实时前沿追踪(避免综述过时,紧跟领域动态)
- 订阅核心作者、核心主题:点击作者/主题标签→「Follow」;
- 开启Notifications:设置「New Papers Alert」,系统每日推送最新发表的相关文献;
- 定期更新Collection:每月导入10-20篇最新文献,刷新图谱,确保综述覆盖最新进展------2026年无人机路径规划领域每月新增50+文献,必须实时追踪。
6.4 团队协作调研(多人同步,提升效率)
- 点击Collection顶部「Share」,生成共享链接;
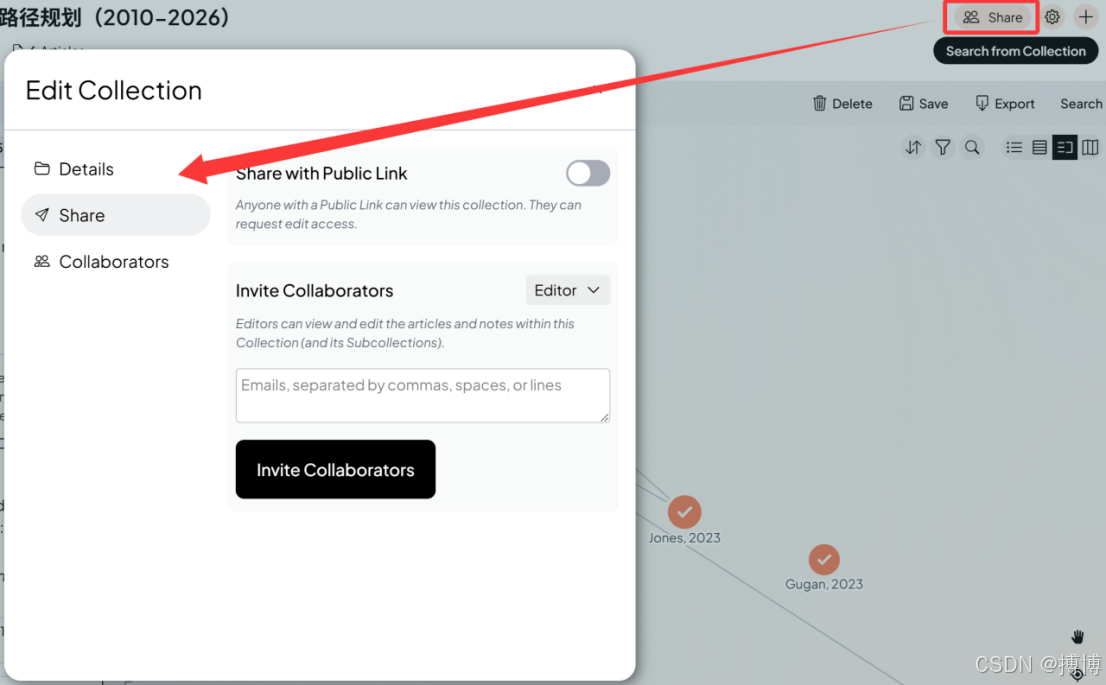
- 分享给导师、团队成员,支持在线批注、文献添加、图谱编辑 ;
- 多人分工:一人负责算法文献,一人负责应用文献,一人负责挑战分析,最后合并Collection,生成完整图谱------适合硕博开题、团队科研项目。
七、避坑指南:Research Rabbit常见问题与解决方法
7.1 问题1:图谱节点过多,混乱不堪
原因:种子文献过多、未筛选低质量文献;
解决:①种子文献控制在3-5篇;②用Filter筛选「Citation>50」「Journal Articles」;③手动删除低关联节点;④分主题生成子图谱(如仅看AI算法)。
7.2 问题2:中文文献匹配精度低
原因:2026版对CNKI整合仍有限,中文文献元数据不完整;
解决:①优先用DOI/标题导入中文核心文献;②上传PDF解析元数据;③结合Semantic Scholar补充中英文献;④用关键词「消费级无人机路径规划」检索,筛选高被引中文文献。
7.3 问题3:导出BibTeX格式错误,无法导入Word
原因:文献元数据缺失(如无DOI、期刊名);
解决:①导入前核对文献元数据,补充缺失信息;②用Zotero同步后导出,确保格式规范;③手动修正错误条目,再导入写作软件。
7.4 问题4:Similar推荐文献不相关
原因:种子文献质量低、关键词不精准;
解决:①替换种子文献为高被引核心综述;②优化关键词,加入细分维度(如「dynamic obstacle avoidance」「lightweight algorithm」);③手动标记不相关文献为「Not Relevant」,系统会优化后续推荐。
八、总结:Research Rabbit是高水平文献综述的 " 核心引擎 "
Research Rabbit 2026最新版,通过种子文献构建→图谱深度分析→文献智能管理→写作全流程赋能 ,彻底重构了文献调研与写作逻辑。以消费级无人机路径规划为例,从3-5篇种子文献出发,可快速生成覆盖领域全脉络的知识图谱,精准定位核心文献、关键作者、研究空白,最终写出逻辑严谨、论据扎实、创新点明确的高水平文献综述与学术论文。
核心使用原则(牢记) :
- 种子文献是基础,宁缺毋滥 ,必须高被引、高权威;
- 图谱分析是核心,Graph+Timeline+Author Network 结合使用,不单一依赖某一视图;
- 文献管理是保障,标签+批注+分类 ,写作时直接调用;
- AI是辅助,人工批判性分析 不可少,确保综述深度与可信度。
后续可结合Consensus(共识验证)、NotebookLM(批量精读)、Sourcely(引用校验),形成完整AI文献综述工作流,进一步提升科研效率与论文质量。