本文核心内容:
1.带约束的多目标无人机路径规划建模(路径平滑算子,可实现单/多架UAV路径规划)2.PlatEMO平台(代码基于PlatEMO 2.8.0)3.双层路径规划模型(静态-多目标优化+ 动态-DWA)4.多视图实验结果展示与HV、PD等数据结果对比
00
目录
1 无人机约束优化
2 问题建模
3 双层规划模型
4 代码目录求解结果评估与分析
5 代码说明
01
无人机约束优化
无人机路径规划问题可视为带约束的单目标优化问题(CSOPs)1或带约束的多目标优化问题(CMOPs)2。当将无人机路径规划问题当作单目标优化问题时,大多数算法会采用加权求和法构建目标函数,该函数整合了与无人机及其飞行路径相关的需求和约束。然而,确定权重向量是一项耗时的工作,尤其是当存在许多需求和约束时。很难根据决策者的偏好找到合适的权重向量。而将其视为带约束的多目标优化问题时,其优势在于能够在一次运行中获得一组具有不同偏好的最优解。在过去几十年中,带约束的多目标进化算法(CMOEAs)引起了众多研究者的兴趣。
在复杂场景中,无人机路径规划问题具有很强的约束性,求解算法必须具备以适当方式处理约束的能力。常用的约束处理技术包括:
惩罚函数法
该方法易于实现,且不需要任何参数调整。但是,它对整个种群中的个体使用相同的惩罚因子,这对于某些搜索区域来说可能过大或过小。
基于可行解优先于不可行解的偏好方法
该方法偏好可行解,但当存在多个可行区域时,其容易收敛到局部最优区域。
基于修复算子的方法
该方法将不可行解修复为可行解。然而,对于一些可行性比率较低的问题,找到可行解本身就是一个难题。
基于在进化过程中暂时不考虑约束违反的方法
该方法将进化过程分为两个阶段。在第一阶段,不考虑约束违反情况;而在第二阶段,则将约束违反情况纳入考虑,以引导搜索向可行区域进行。该方法在路径规划中较为常见。
由于本文并不着重于算法改进,因此对于约束处理技术仅作简单介绍。由前文所述,本文将路径规划问题建模为一个带约束的多目标优化问题,下面KAU将对其建模进行全面阐述。
02
问题建模
作为无人机任务规划的关键组成部分,无人机路径规划为无人机的自主控制和智能飞行提供了最有力的技术保障。其目标是根据无人机自身的机动性和飞行空间环境,规划出一条从起点到目标点、安全性更高且轨迹成本更低的飞行路径。此外,对于多架无人机,还需考虑它们之间的避撞问题。
本文假设飞行环境是固定的(在双层规划模型中将考虑动态威胁),所有威胁区域和禁飞区域都是已知的。在三维飞行空间中,无人机路径按飞行起点 S、N个航点和目标点T的顺序描述为Path={S,P1, P2, ..., PN, T},它由N个控制点和预先定义的轨迹平滑策略确定,如图1所示。这对于评估无人机的规划路径具有重要的量化作用。控制点可以是空间中的任意点,此外本文采用三次B样条曲线来描述无人机的飞行路径。
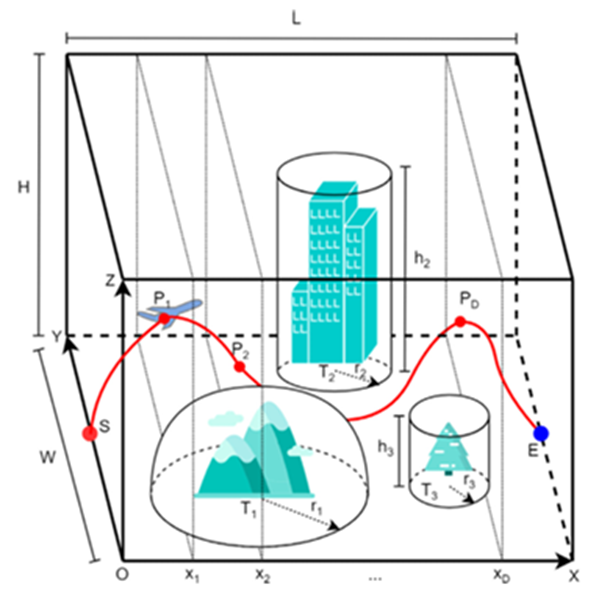
图1 轨迹说明(图来源文献3)
路径规划的目的是获得一条最优或接近最优的飞行路线,以规避来自敌对环境的威胁。本文的路径规划模型如下:
2.1. 无人机运动学模型和约束条件
2.1.1 无人机模型
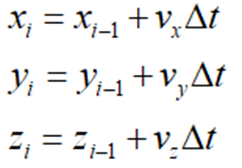
为评估路径规划的可行性,无人机被建模为具有运动学约束的质点4。这种建模选择着重于路径规划和多目标优化,而非特定平台的飞行控制动力学。速度、俯仰角和偏航角的边界提供了对可行飞行包线的简化描述,并且可以针对特定的无人机平台进行参数化设置。其运动遵循一个简化的运动学模型。无人机的位置由坐标向量 𝑥, 𝑦, zᵀ表示,其运动学定义如下:
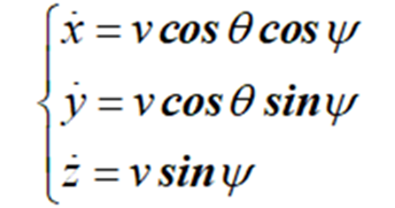
此处,𝑣表示无人机的线速度,𝜃是控制爬升和下降的俯仰角,𝜓是控制航向的偏航角。
2.1.2 约束条件
为确保无人机执行任务时的安全性,在规划阶段必须考虑相关约束。本研究将必要的约束分为三大类:无人机性能约束、任务环境约束和协同约束。
(1)无人机性能约束
a)速度约束
无人机飞行时,由于其自身物理特性的限制,飞行速度需保持在一定范围内,飞行速度约束如下式所示:
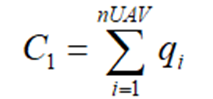
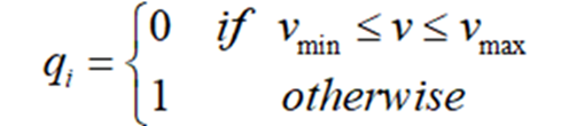
其中,nUAV为拟定执行任务的无人机数量,v代表无人机在任务期间的速度;vmin、vmax分别是无人机的最小和最大飞行速度。
b) 最大航程约束
在实际飞行中,无人机由于燃料限制,航程有限,因此每架无人机的飞行航程不能超过其最大飞行距离。航程约束表示为:
式中,Li为第i架无人机飞行轨迹长度。
c) 高度约束
为确保无人机的飞行安全,要求无人机在适当的高度飞行。一方面,如果无人机飞得离地面过高,会增加被雷达探测到的几率,因此无人机必须在地面障碍物上方保持安全的飞行高度。另一方面,如果无人机飞得过低,则很可能与山体或障碍物相撞,因此无人机的飞行高度不能高于最大允许高度。综上,无人机的飞行高度约束可表达如下:

式中,z*i,j为第i架UAV的第j个航迹点距地形的高度,Hmax是无人机的最大允许高度,Hmin是地形与无人机之间的最小安全距离。
(2)任务环境约束
a)边界约束
为确保任务的有效执行,需要确保无人机处于指定的任务区域内,以下方程给出了边界约束。


b) 地形约束
无人机在飞行过程中需要避开空间地形,如果飞行路径与这些区域相交,则认为无人机已坠毁。地形约束可以表示为:


其中ri是无人机的飞行路径,TF是自然地形障碍区域。
(3)协同约束
多无人机协同任务除了需要考虑上述约束外,还需考虑相关的协同约束。本文将这类约束分为两种类型:空间协同和时间协同。空间协同是指在任务执行过程中保持无人机之间的安全间距,以防止碰撞。而时间协同是指需要在规定时间内完成指定任务。协同约束可表示如下:
a) 时间约束
其中ti,a是无人机i完成任务a的时间,T是任务必须完成的最晚时间。
b) 空间约束
在为多架无人机规划路径时,必须避免多架无人机之间发生碰撞,这需要监控任意两架无人机在飞行过程中的相互接近情况,并需要无人机同时满足空间和时间约束。换句话说,无人机之间在同一时间必须保持安全距离。为此,需将第j架无人机的路径点与其他无人机的所有路径点进行比较。如果第j架无人机的第m个路径点与第i架无人作战飞机的第n个路径点之间的距离小于允许的最小安全距离dsafe,则需检查这些路径点的时间间隔,以确定它们是否会发生碰撞。无人机i和无人机j的两个路径点(xi,m, yi,m, zi,m)、(xj,n, yj,n, zj,n)之间的距离计算如下:

则空间约束可表示为:

式中,ti,m为无人机i到达航迹点m的时间,tj,n为无人机j到达航迹点n的时间。
2.2 多目标路径评估函数设计
无人机路径规划是一个多目标、多约束的全局优化问题。设计并体现各目标的成本函数是解决路径规划问题的关键环节。本文定义了3个目标函数,用于评估路径长度、避障风险和路径平滑性。
2.2.1 路径长度
当无人机的飞行速度恒定时,飞行长度越短,完成飞行任务所需的时间就越少,同时燃油消耗也越低。将候选路径用P𝑖 ={𝑃𝑖,s, 𝑃𝑖,2, ..., 𝑃𝑖,e}表示,每个航点为𝑃𝑖,𝑗=(𝑥𝑖,𝑗, 𝑦𝑖,𝑗, z𝑖,𝑗)。因此,定义路径长度目标𝑓1为这些线段长度的总和,如公式所示。
图2 航迹及其变量说明(图来源文献4)
其中,𝑅min是最小允许路径点间距,用于限制路径密度,同时避免重复路径点对整体质量产生影响。Pi,s为无人机i的起点,Pi,e为无人机i的终点,n是航迹点数量。
2.2.2 避障
在复杂地形中,无人机不仅要避开山脉和其他地形等地面障碍物,同时也要避开地面防空系统威胁范围内的区域。在空域中,无人机必须避开空中威胁的影响,包括防空导弹、战斗机以及禁飞区。总体而言,路径规划应确保飞行高度满足安全要求,并避开所有潜在威胁区域,以保证飞行的安全性和效率。
本研究中的威胁源主要考虑来自敌方雷达、火炮的威胁以及因恶劣天气、未知区域而被用户预定义的禁飞区,同时本文将雷达、火炮威胁源都表示为一个圆柱模型,如图2所示,而将禁飞区定义为长方体区域。规划的路径避开所有威胁区域至关重要,因为穿越这些区域会使无人机暴露在敌方防空火力和导弹之下。这些威胁区域以圆柱体形式呈现,其区别在于相应的探测范围与杀伤范围不同。威胁成本由下式给出:
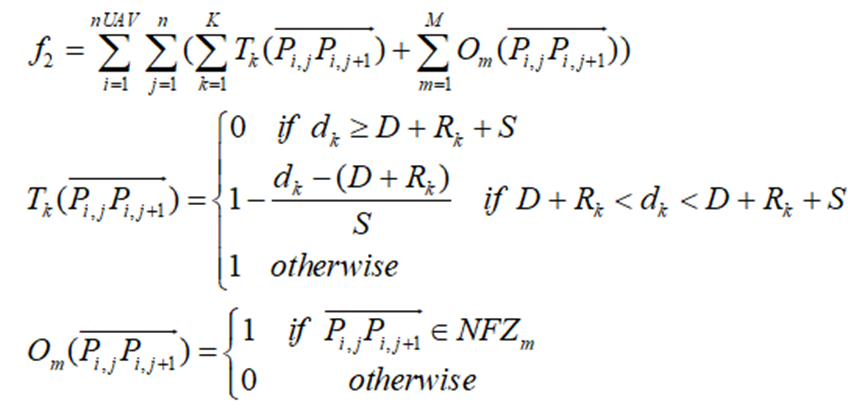
其中,k是威胁物(包括火炮和雷达)的数量,𝑑𝑘是第k个威胁物的中心与Pi,jPi,j+1线段之间的距离。无人机的机身尺寸由等效直径𝐷表示。为确保安全,引入了安全缓冲距离𝑆。M为禁飞区数量。
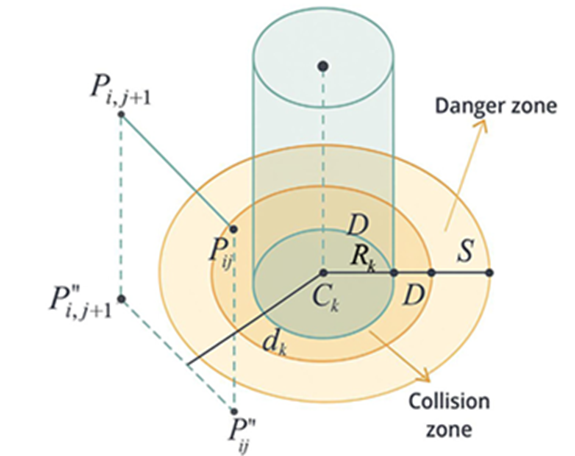
图3 威胁建模(图来源文献5)
2.2.3 路径平滑度
从理论上讲,路径的平滑度主要取决于无人作战飞机的转弯角和俯仰角。角度越小,路径就越平滑,越有利于无人作战飞机飞行。过度的角度变化会导致飞行路径不连续,并增加飞行控制难度。此外,在无人机飞行期间,无论是在海洋区域还是空中区域,高度波动都会对能耗产生显著影响,并影响着飞行稳定性,虽然山峰地形会迫使高度产生变化,但平滑的高度过渡能避免急剧起伏,减少与地形的危险接近,同时保持安全裕度。为了最大限度地减少能源使用并确保飞行稳定性和安全性,保持一致的飞行高度至关重要。因此,平滑性目标用于限制在飞行过程中无人机的高度以及角度变化,以避免产生额外能源成本并便于无人机运动控制。
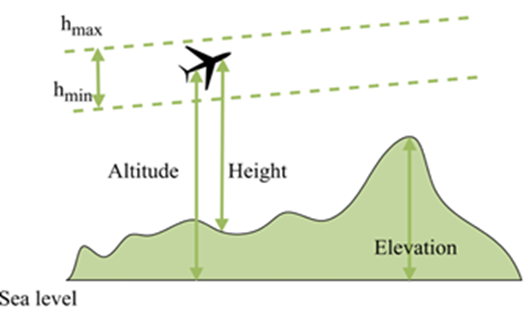
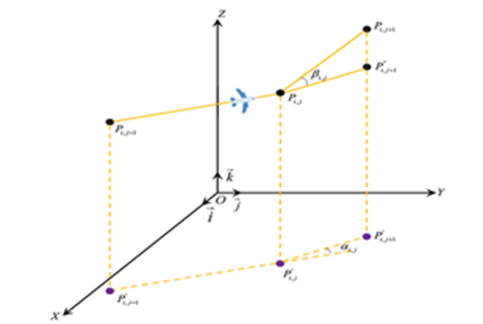
图4 平滑说明(图来源文献6)
高度
无人机的高度被限制在允许范围 z𝑙𝑜𝑤, z𝑢𝑝 内,其中z𝑙𝑜𝑤和z𝑢𝑝分别是最低和最高允许飞行高度。为了量化高度稳定性,我们将理想高度z0定义为该区间的中点:
引入每个路径点的高度偏移成本后,高度成本可表示为:
转弯角
转弯角是连续两段飞行路径子段在Oxy平面上的投影(即向量的投影)之间的夹角。因此,转弯成本可根据以下公式计算:
俯仰角
俯仰角是路线段与其在Oxy平面上的投影之间的夹角。因此,爬升成本计算如下:
最终,归一化后路径平滑度成本为:
2.3 多目标建模求解
2.3.1 多目标优化算法
在实际的无人机路径规划中,多个目标往往存在冲突,包括路径长度短、安全避障、轨迹平滑。这些标准无法通过单一的标量指标很好地体现,传统的单目标优化往往是不够的。因此,多目标优化已成为解决这类问题的广泛使用的建模框架。基本的多目标优化问题旨在决策空间中寻找一个或一组解决方案,以同时优化多个目标函数。其可形式化表述为:

在此,𝐗∈𝛺表示可行搜索空间中的决策向量。函数𝑓i(𝐗)是第𝑖个需要最小化的目标。
其中X代表一个𝐺维决策向量,其编码方式下图所示,𝐺 = 3⋅3𝐷表示搜索空间。
在求解算法方面,本代码基于PlatEMO平台,该平台由安徽大学的BIMK研究所开发[7],其集成了大量的多目标优化算法,便于调用、算法对比以及后期算法修改。2.3.2 随机路径平滑算子
对于无人机的路径规划问题,路径的弯曲往往会导致无人机在飞行过程中多次转弯,这增加了无人机不满足最小转弯半径性能约束的概率。因此,提出了一种随机路径调整策略。在上述阶段生成每个个体后,使用下式在当前个体所代表的路径上随机选择一段线段以着重减小它们之间的夹角:
2.4 地形环境说明
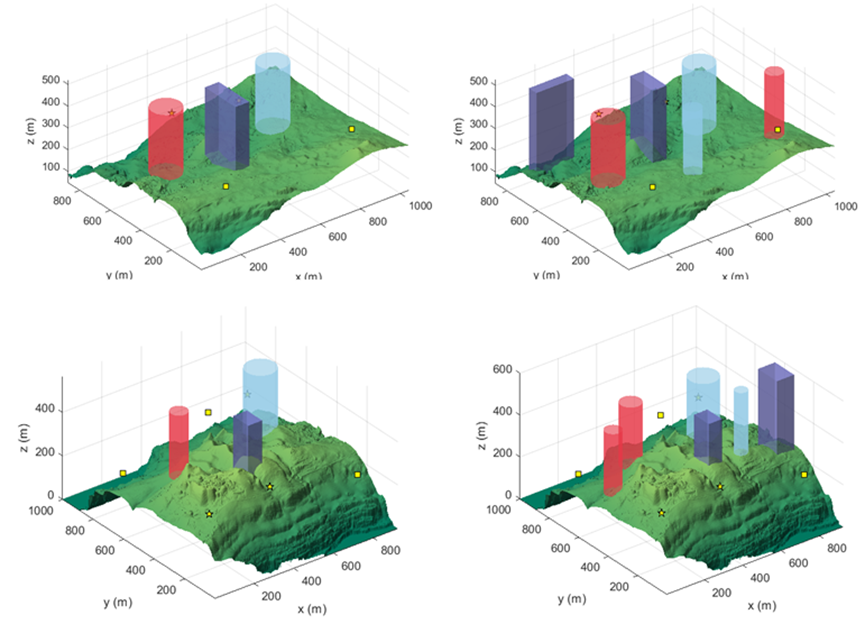
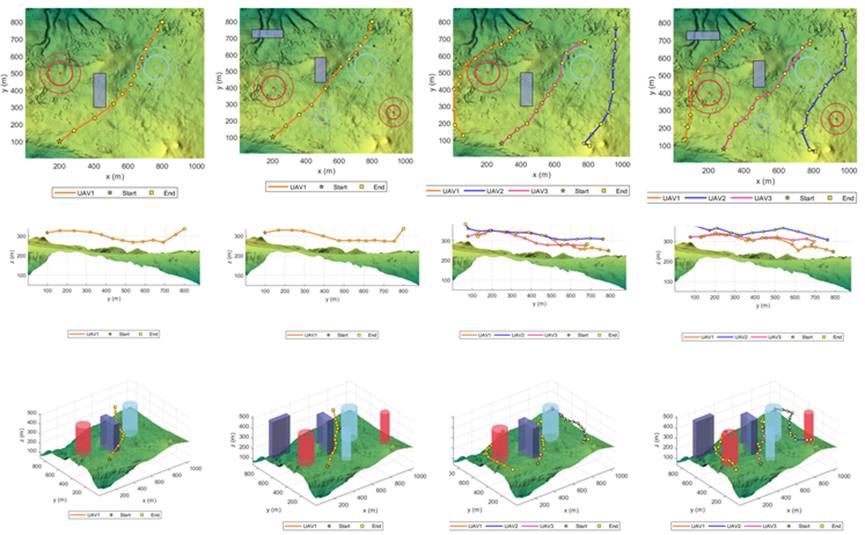
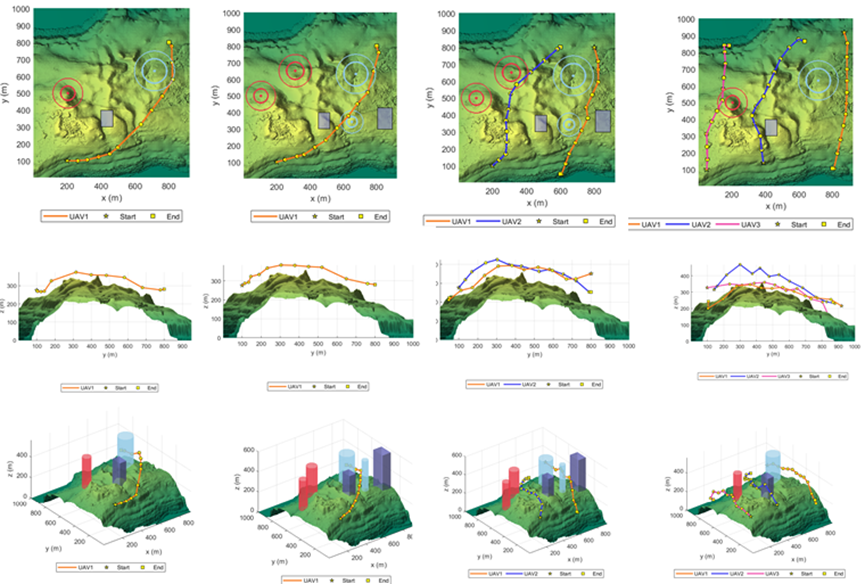
实验地图采用了两个来自澳大利亚圣诞岛、地形结构差异显著的真实数字高程模型(DEMs)作为评估地图5。测试在该原始DEM的基础上,在每个区域添加了障碍物与禁飞区,最终形成了4个复杂程度各异的测试场景(如图 17 和图 18 所示)。在每个场景中,红色圆柱体代表火炮威胁,蓝色圆柱体代表雷达威胁,紫色长方体代表禁飞区,其数量和空间分布根据复杂程度来设置。
DEM 数据及预处理:实验使用的两个地形数据均以float32栅格形式存储,每个网格单元的空间分辨率为5米×5米。
2.5 解的选择
在多目标优化中,Pareto前沿通常由一组非支配解构成,如何从中选择一个最具代表性的解用于最终路径展示,是决策过程中的关键问题。针对三目标优化问题,本文采用超平面距离法识别前沿上的"膝点"(knee point),该点被视为各目标间权衡最显著的折衷解。该方法已有许多文献进行了解析,本文对其作简单介绍:
设3目标的3个极端点为:
基于这三点确定超平面,平面的法向量满足:
基于点fext1的平面方程可整理为:
则对于Pareto上的任意解f(i)=(f(i)1, f(i)2,f(i)3),其到超平面的垂直距离为: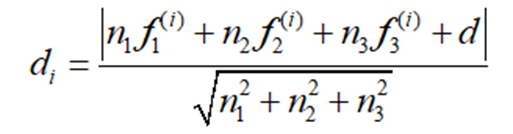
膝点即为具有最大距离的解,也即是Pareto前沿上弯曲最剧烈的点。03
双层规划模型
相比静态路径规划,动态路径规划要复杂的多,因为静态路径规划是在地图环境已知的情况下进行路径规划,适用的场景有限,因为不能确保路径规划完成后不会有其他障碍物出现,为了应对战场上更为多变的场景,此时需要研究局部路径规划器根据环境的动态信息进行实时避障。即局部路径规划器不仅需要考虑无人机运动约束还需能够较好的跟随全局路径。常见的局部避障算法包括动态窗口法、人工势场法、模糊控制等。其中动态窗口法具有实时性较强、解质量高、计算量小等优势。因此本文采用双层规划方案,并使用动态窗口法(Dynamic Window Approach, DWA)让无人机跟随全局路径,然后,实时判断环境周围状态进行动态避障,这样即利用了全局路径的最优性,又利用了局部避障方法的实时性。
3.1 动态威胁物建模
无人机在复杂环境中的飞行避障问题一直是无人机自主导航领域的研究重点。相较于静态障碍物,动态障碍物的建模尤为关键,因为它不仅涉及空间位置关系,还需要考虑障碍物的速度、加速度以及其未来的运动趋势。本文采用传统的固定半径的球形威胁区域的静态障碍物建模方法,从考虑实际威胁场景看,还可以采用威胁半径动态变化的异状(如椭圆)威胁物以作为改进方向。
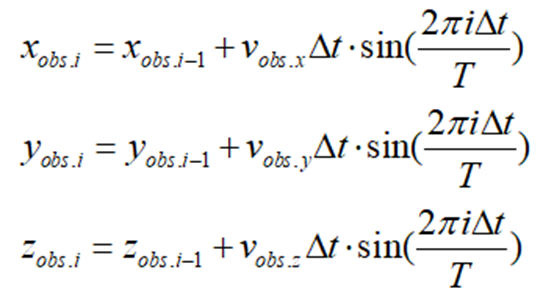
假设无人机和障碍物的速度分别为(vx , vy , vz)和(vobs.x ,vobs.y, vobs.z )则它们在未来时间i时刻的位置可以表示为:
3.2 动态窗口法(DWA)介绍
动态窗口法是一种在路径规划中使用的方法,其目的是在保证路径质量的前提下,尽可能地降低计算的复杂度。动态窗口法的基本思想是:在路径规划的过程中,对路径上每一个点周围的一个区域建立一个窗口,每次只对窗口内的点进行计算,而忽略窗口外的点。通过移动窗口,不断地扩大计算的范围,从而最终得到整条路径。
在实际应用中,动态窗口法可以提高路径规划的速度和效率,特别是在需要处理大量数据的情况下,具有重要的实际意义。不过,动态窗口法也有一定的局限性,如果窗口的大小不合适,可能会导致解的质量降低;如果窗口的移动向不当,可能会导致路径规划失败。因此,使用动态窗口法需要谨慎选择窗口的大小和移动方向,以保证解的质量。
该算法的具体流程本文不作详述,在代码文件中给出参考文献可进行学习。同时,传统DWA存在易陷入局部最优、前瞻性不足等缺陷,对其进行改进也是一个研究方向。
本文引入动态威胁如图所示,动态威胁的数量、速度都可调节。
04
求解结果评估与分析
4.1 评价指标
在本文所述的三目标最小化问题中,帕累托前沿的评价准则可概括如下:帕累托前沿越靠近左下角,算法的优化水平越高;帕累托前沿曲线越长,表明解的分布范围越广;帕累托前沿上的点分布越均匀,反映解的多样性越好。
此外,我们采用帕累托前沿曲面的特征参数进行定量对比,即超体积(hypervolume,HV)43、纯多样性(pure diversity,PD)44,如式 (15)--(17) 所示。HV值越高表明整体收敛性与分布性越好,PD值越高则表示近似帕累托前沿(PF)多样性更优。其计算公式如下:
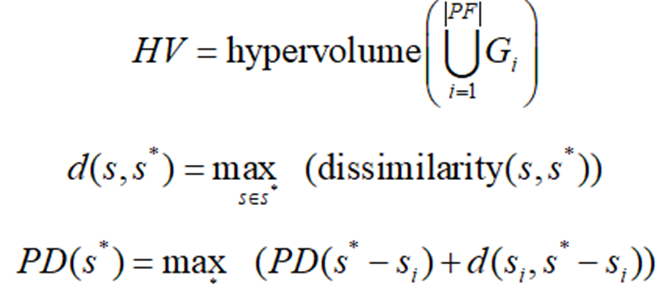
其中,Gi表示解在目标空间中的位置;∣PF∣表示帕累托集中解的总数;d(s,s ∗)衡量个体 s与群体s∗之间的差异;Distance 为包含个体间曼哈顿距离的矩阵。
4.2 实验结果与分析
4.2.1 算法指标数据结果
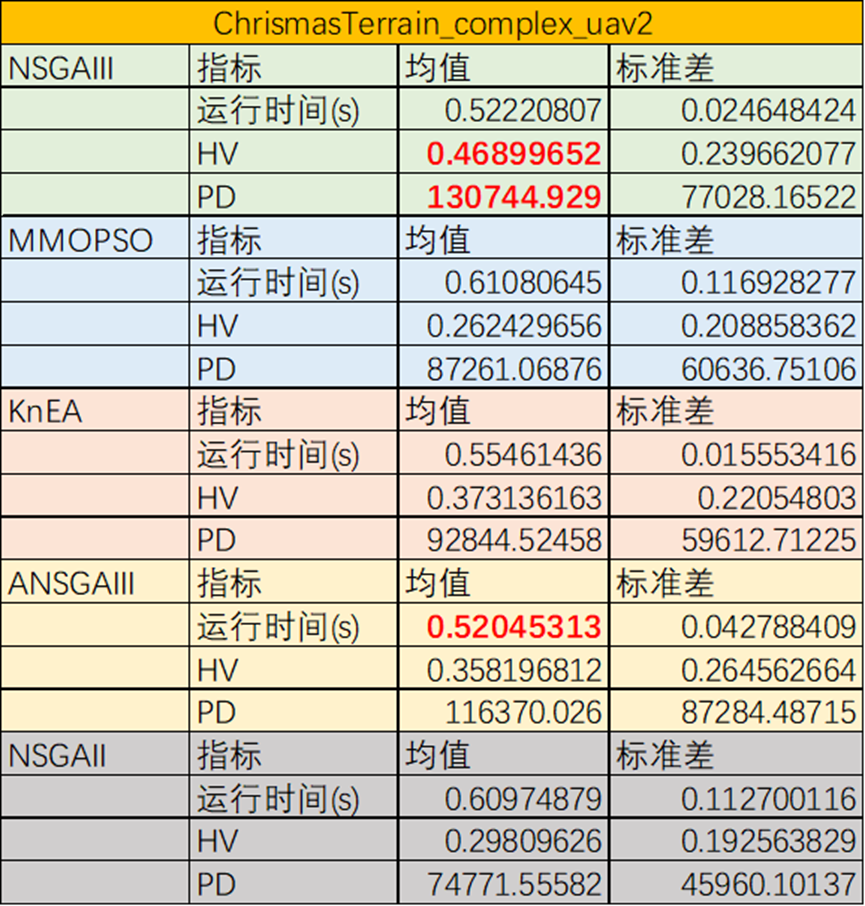
以地图2、简单威胁、3架UAV和地图1、复杂威胁、2架UAV的测试条件为例,下面两个表展示了实验结果,报告了部分算法在该测试用例下运行时间、HV与PD指标的均值及标准差(Std)。每个测试用例的最优值以粗体突出显示。

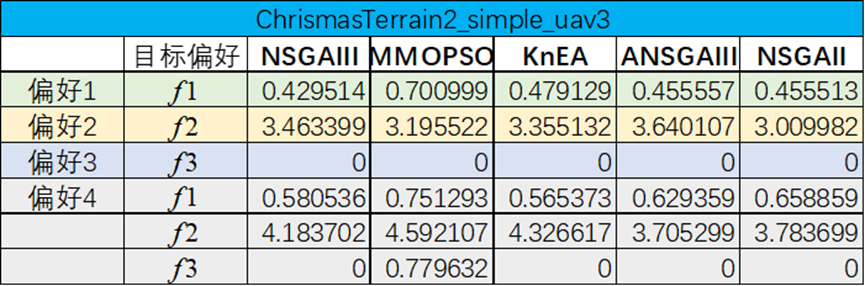
此外,表5展示算法在上述两个测试条件下不同偏好的对比结果。偏好1 主要侧重最优路径长度,偏好2主要侧重最优路径平滑度,偏好3主要侧重最优威胁成本,偏好4则对于路径长度、平滑度和威胁成本都处于同等重要的偏好。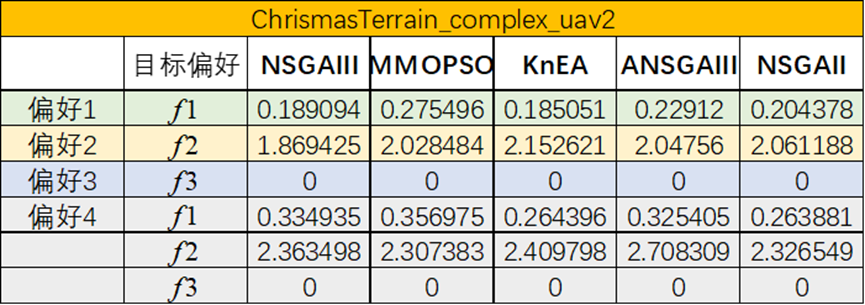
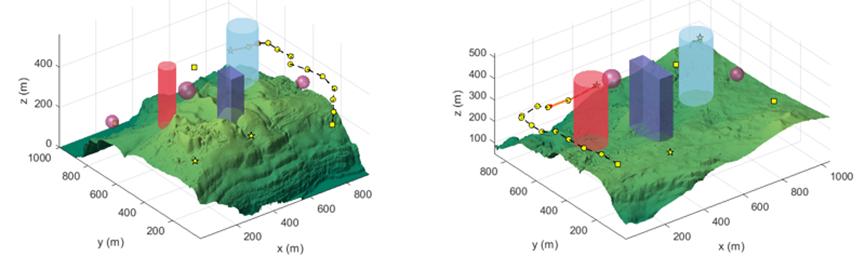
4.2.2 静态路径规划三视图
为直观展示算法用于路径规划中的性能,本文以NSGAII为例,从生成的帕累托前沿(PF)中选取其折衷点解,展示其三视图以验证该模型设置的有效性。本代码涉及多个测试场景,可选场景设置参数包括地图(1/2),复杂度(简单/复杂),UAV数量(1-3,可以根据需要增加UAV数量),将这些参数排列组合可生成多个测试场景。部分结果如下:
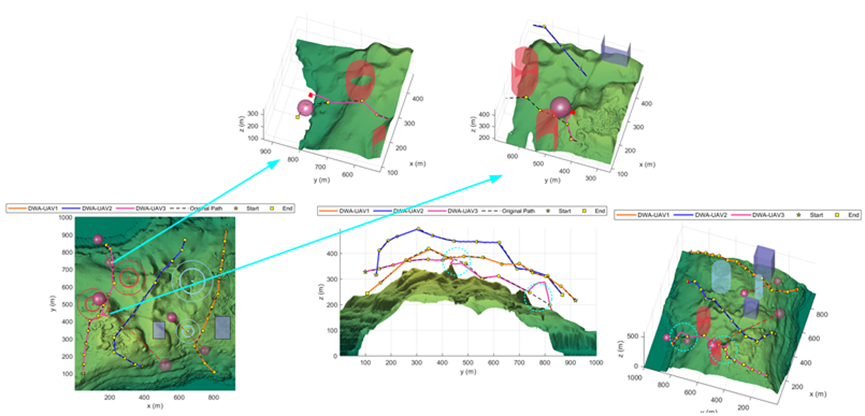
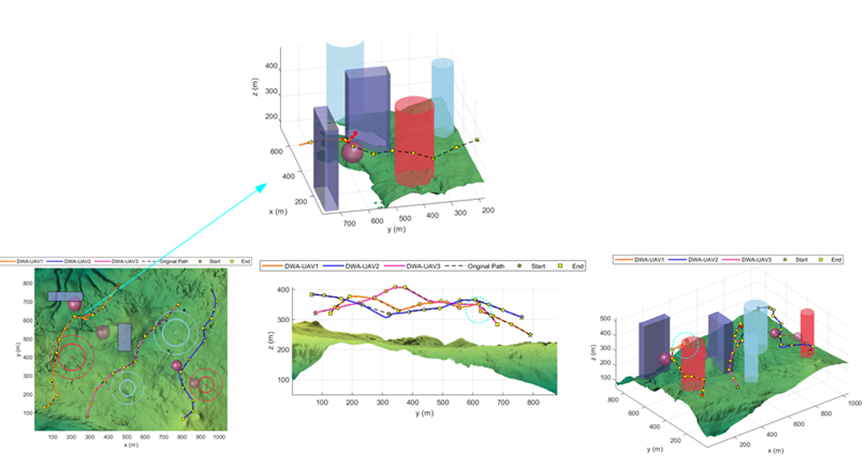
4.2.3 动态路径规划三视图
图中,黑色虚线为多目标优化算法根据已知地图信息规划得到的离线路径,而实线则为DWA根据动态威胁调整出的实时路径。
05
代码说明
4.1 代码目录及注释
该项目的代码总览如下:
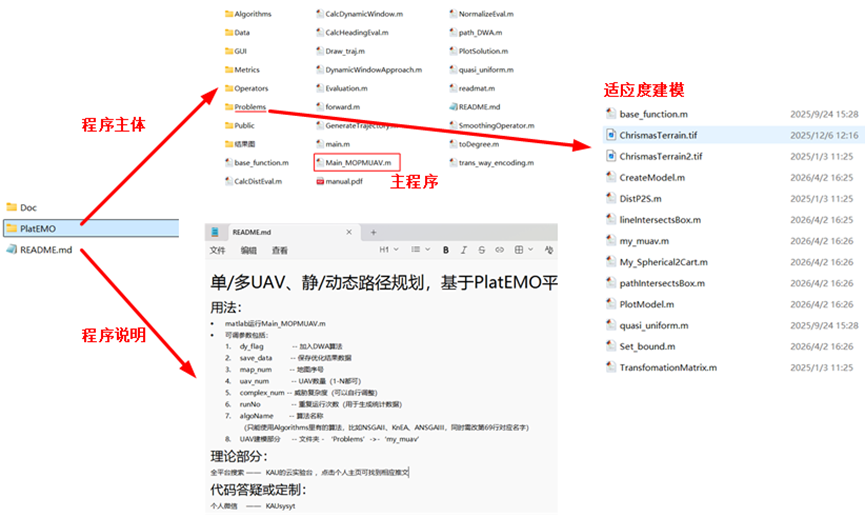
代码注释详细,部分代码如下:
4.2 项目存在问题
代码可以实现单/多无人机路径规划,同时可以实现静态/动态地图的路径规划,但本代码也尚存在一些不足:
①多目标优化性能.
KAU尝试了几种多目标优化算法,发现使用NSGA类算法效果较好,而PSO类算法效果则欠佳,甚至会出现无法找寻到可行解的问题,可进行改进算法以提升其优化性能。
②局部路径规划算法性能.
DWA算法容易陷入局部解,在某些地形中表现不佳,同样可进行改进以提升其性能。
4.3 代码获取
GZH (KAU的云实验台 )后台回复"LUAV "
后续KAU也将进一步尝试强化学习应用于UAV 中,感兴趣的伙伴可继续关注!
参考文献
1I.K. Nikolos, E.S. Zografos, A.N. Brintaki, UAV path planning using evolutionary algorithms, in: Innovations In Intelligent Machines-1, Springer, 2007, pp. 77--111.
2S. Mittal, K. Deb, Three-dimensional offline path planning for UAVs using multiobjective evolutionary algorithms, in: 2007 IEEE Congress On Evolutionary Computation, IEEE, 2007, pp. 3195--3202.
3Chaoqun Zhang, Wenjuan Zhou, Weidong Qin, Weidong Tang, A novel UAV path planning approach: Heuristic crossing search and rescue optimization algorithm, Expert Systems with Applications,Volume 215,2023,119243,ISSN 0957-4174,https://doi.org/10.1016/j.eswa.2022.119243.
4B. Li, J. Zhang, L. Dai, K.L. Teo, S. Wang, A hybrid offline optimization method for reconfiguration of multi-UAV formations, IEEE Trans. Aerosp. Electron. Syst. 57 (1) (2020) 506--520
5Yi Wang, Fangxiu Wang, Hui Liu,IMORIME: Multi-objective UAV path planning via alternating reference points and relative-error guidance,Displays,Volume 93,2026,103367,ISSN 0141-9382,https://doi.org/10.1016/j.displa.2026.103367.
6Kai Meng, Binghong Wu, Bin Xin, Fang Deng, Chen Chen,Multiobjective multi-UAV path planning via evolutionary multitasking optimization with adaptive operator selection and knowledge fusion,Swarm and Evolutionary Computation,Volume 99,2025,102145,ISSN 2210-6502,https://doi.org/10.1016/j.swevo.2025.102145.
7Ye Tian, Ran Cheng, Xingyi Zhang, and Yaochu Jin, "PlatEMO: A MATLAB platform for evolutionary multi‐objective optimization educational forum," IEEE Computational Intelligence Magazine, 2017, 12(4): 73‐87.
感谢阅读,祝顺利!