一、SO(3) 是什么
SO(3) (Special Orthogonal Group):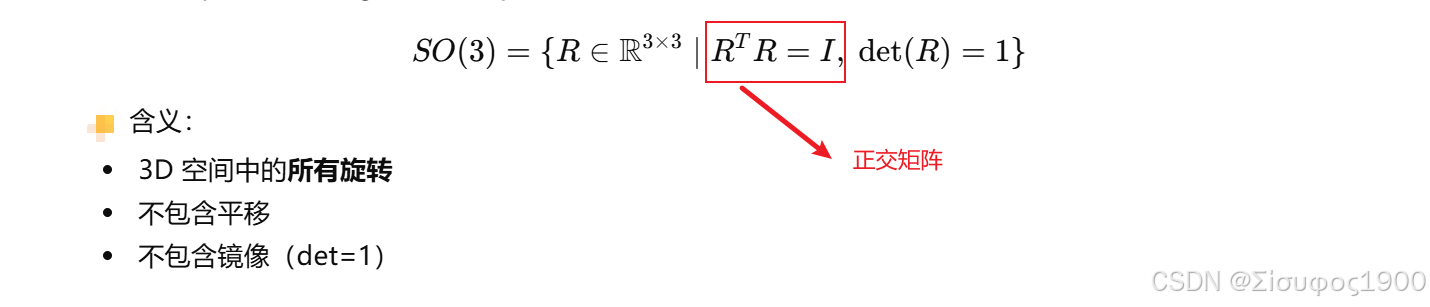
几何理解(非常重要)
SO(3) 表示:
"刚体绕某个轴旋转一个角度"
任何旋转都可以表示为:
一个单位轴 + 一个角度
这就是:
轴角表示(Axis-Angle)
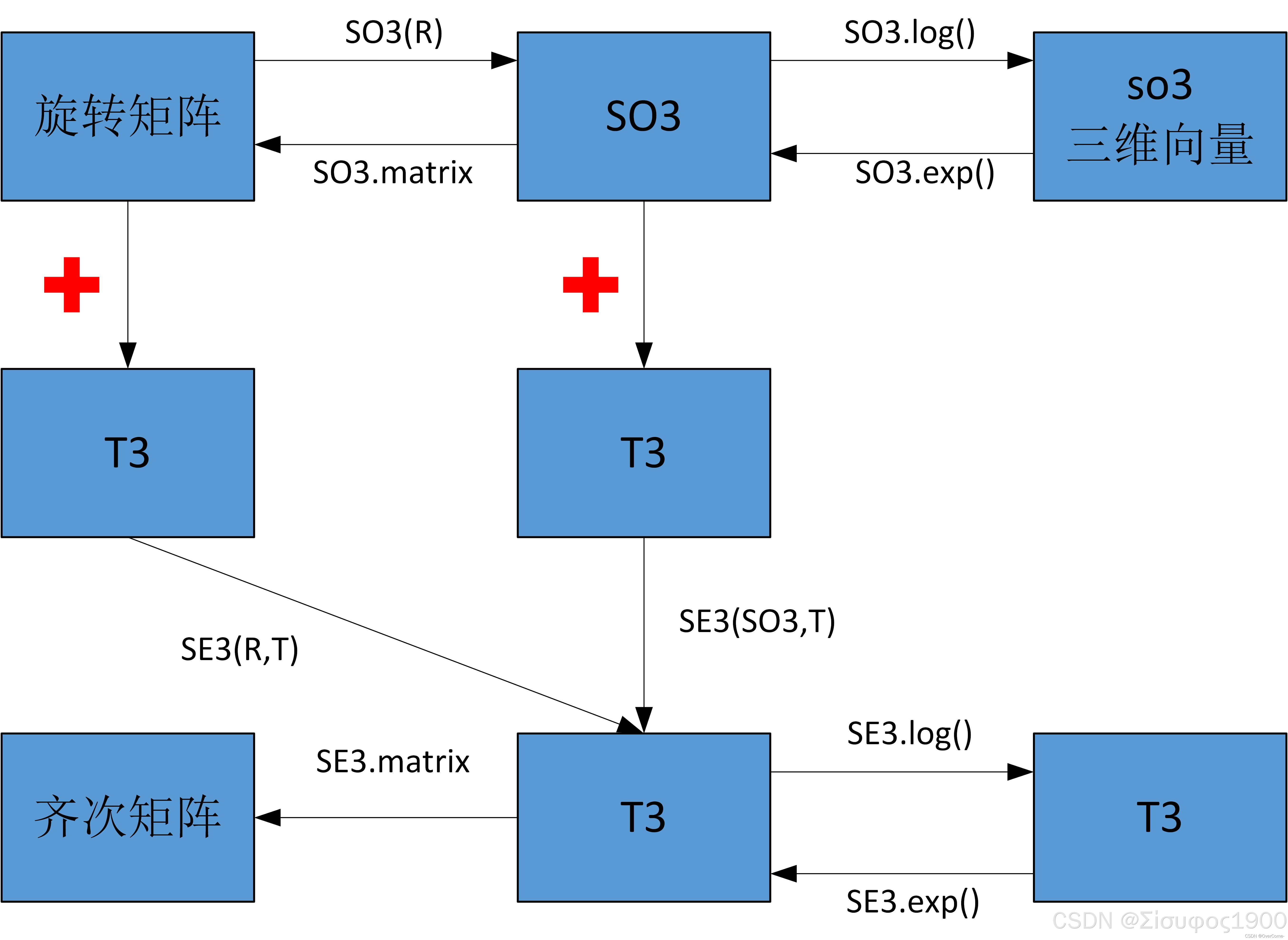
符号
- SE(3):特殊欧式群
- se(3):特殊欧式群的李代数
- SO(3): 三维特殊正交群
- so(3): 三维特殊正交群的李代数
- T(3):三维移动群
- R: 旋转矩阵
二、SO3的性质
https://geek.csdn.net/658a7fcfd4226e0eb426fc7f.html
1、 正交性

列向量互相正交,长度为1
2、行列式

排除反射(镜像)
3、自由度
虽然是 3×3 矩阵,但只有 3 个自由度
三、SO(3) 的李代数:so(3)
SO(3) 是非线性流形
不能直接线性优化,所以引入:so(3)
1、向量->反对称矩阵
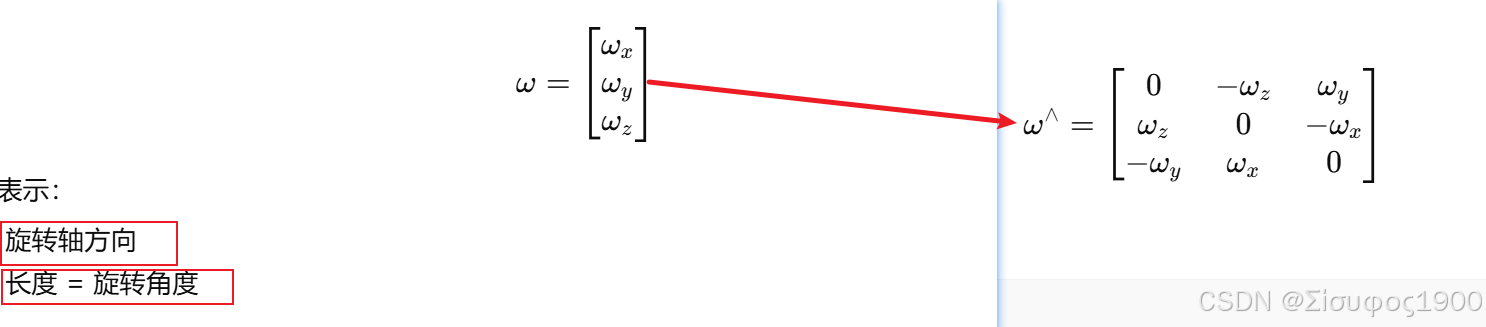
**2、**几何意义
叉乘矩阵
3、为什么要用 SO(3)
欧拉角问题
- 万向锁(gimbal lock)
- 不连续
旋转矩阵问题
- 9个参数但只有3自由度
- 优化困难(需要约束)
SO(3) + 李代数优势
用 3 维向量表示旋转
- 无约束优化
- 数值稳定
- 适合 Gauss-Newton / LM
四、常见面试问题
1、Jacobian(高频面试)
2、SO(3) 为什么是流形?
因为:
是非线性约束。
3、exp / log 有什么用?
在局部线性空间和全局空间之间转换