1. 引言
在机器人操作系统的演进历程中,通信机制始终是核心技术挑战之一。ROS1采用的自研通信框架在单机场景下表现尚可,但在分布式系统、实时性要求、服务质量保障等方面存在明显短板。这些局限性促使ROS2进行了架构级重构,其中最关键的决策就是引入DDS(Data Distribution Service)作为底层通信中间件。这一选择不仅带来了工业级的可靠性和实时性保障,也为机器人系统走向云边协同、多机协作奠定了技术基础。然而,随着应用场景的多样化,从资源受限的嵌入式设备到广域网分布式部署,单一的DDS方案开始显露出其适用边界。本文将深入剖析ROS2的通信中间件架构,对比主流实现方案的性能特性,并探讨Zenoh、Iceoryx等新兴技术如何突破传统DDS的局限。
2. DDS技术背景与核心机制
DDS是由对象管理组织(OMG)制定的数据分发服务标准,最初设计目标是解决国防、航空航天等关键领域的实时数据分发问题。该标准定义了一套完整的发布-订阅通信模型,通过DCPS(Data-Centric Publish-Subscribe)层提供数据为中心的抽象接口,底层则依赖RTPS(Real-Time Publish-Subscribe)协议实现跨网络的可靠传输。DDS的核心优势在于其丰富的服务质量(QoS)策略体系,涵盖可靠性、持久化、时效性、资源限制等23项可配置参数,使开发者能够针对不同应用场景精细调优通信行为。
从技术实现角度看,DDS采用对等通信模型,节点间直接交换数据而无需中心化代理。这种去中心化架构在降低单点故障风险的同时,也引入了复杂的服务发现机制。RTPS协议通过SPDP(Simple Participant Discovery Protocol)和SEDP(Simple Endpoint Discovery Protocol)两阶段发现流程,使新加入的节点能够自动感知网络拓扑并建立通信链路。这一机制在局域网环境下运作良好,但在跨子网或广域网场景中,往往需要额外的网络配置支持。
DDS标准的另一个关键设计是数据类型系统。通过IDL(Interface Definition Language)定义消息结构,DDS实现了强类型约束和跨语言互操作性。在ROS2中,每个消息类型都会被转换为对应的IDL定义,并在编译时生成序列化/反序列化代码。这种静态类型检查机制虽然增加了系统复杂度,但有效避免了运行时的类型错误,提升了系统可靠性。
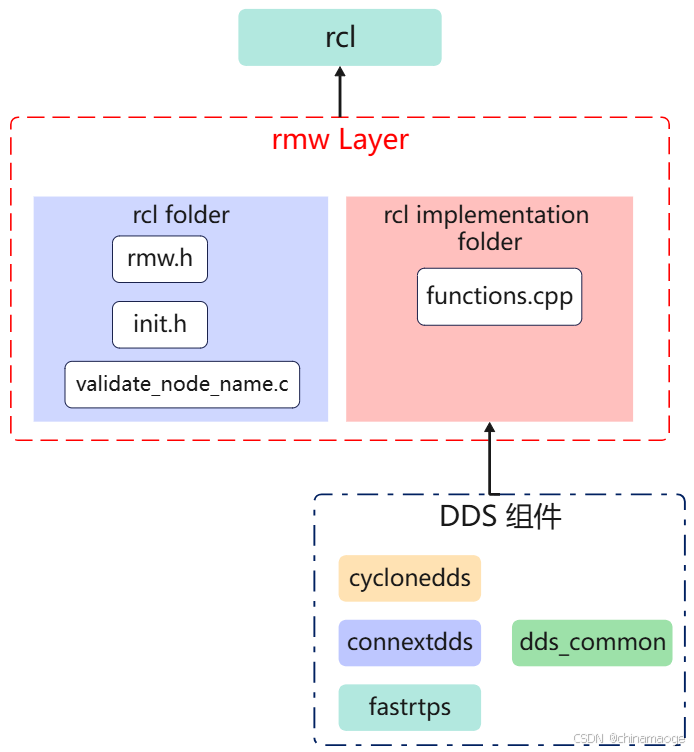
值得注意的是,DDS标准本身只规定了接口规范,具体实现由各厂商提供。这导致不同DDS产品在性能表现、资源占用、协议兼容性等方面存在显著差异。ROS2通过RMW(ROS Middleware)抽象层屏蔽了底层实现细节,使应用代码能够在不同DDS产品间平滑切换,这一设计理念为后续引入非DDS中间件预留了接口空间。
3. ROS2中间件架构:RMW抽象层设计
ROS2的中间件架构采用了分层解耦的设计哲学,其核心是RMW(ROS Middleware Interface)抽象层。这一抽象层位于ROS2客户端库(rclcpp/rclpy)与底层DDS实现之间,定义了一套标准化的API接口,涵盖节点创建、话题发布订阅、服务调用、参数管理等所有通信原语。通过这种架构设计,ROS2实现了应用逻辑与传输层的完全解耦,使同一套机器人代码可以无缝切换底层通信实现。
RMW层的接口设计遵循最小公共特性原则,即只暴露所有中间件实现都能支持的功能集合。以发布器创建为例,RMW定义的接口包含话题名称、消息类型、QoS配置等通用参数,但不涉及特定DDS实现的私有特性。这种设计虽然牺牲了部分高级功能的可访问性,但换来了更好的可移植性和扩展性。在实际开发中,如果确需使用某个DDS产品的专有特性,开发者仍可通过vendor-specific的API进行访问。
cpp
// RMW层发布器创建接口示例
rmw_publisher_t* rmw_create_publisher(
const rmw_node_t* node,
const rosidl_message_type_support_t* type_support,
const char* topic_name,
const rmw_qos_profile_t* qos_profile,
const rmw_publisher_options_t* publisher_options
);上述接口展示了RMW层的典型抽象方式:传入节点句柄、类型支持信息、话题名称和QoS配置,返回中间件无关的发布器句柄。具体的DDS实现需要在此基础上进行适配,将RMW的抽象概念映射到自身的数据结构和API调用。
RMW层的另一个关键设计是QoS配置的标准化。DDS标准定义了23项QoS策略,但不同实现对这些策略的支持程度和默认行为存在差异。RMW通过定义一组预设的QoS Profile(如Sensor Data、Services、Parameters等),为常见应用场景提供了开箱即用的配置模板。同时,RMW也保留了细粒度调整的能力,开发者可以根据具体需求覆盖任意QoS参数。
cpp
// QoS配置示例:传感器数据使用Best Effort模式
rmw_qos_profile_t qos = rmw_qos_profile_sensor_data;
qos.reliability = RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT;
qos.durability = RMW_QOS_POLICY_DURABILITY_VOLATILE;
qos.history = RMW_QOS_POLICY_HISTORY_KEEP_LAST;
qos.depth = 10;这种QoS抽象使得即使底层切换了不同的DDS实现,应用层的QoS语义仍能保持一致。例如,从FastDDS切换到CycloneDDS时,相同的QoS配置会被分别映射到两个产品的具体实现,但对上层应用完全透明。
RMW层的设计还考虑了类型系统的兼容性问题。ROS2消息通过rosidl工具链生成各语言的绑定代码,而DDS要求使用IDL定义数据类型。RMW通过类型支持(Type Support)机制,在编译时为每个ROS消息生成对应的DDS IDL定义和序列化代码。这一转换过程完全自动化,开发者无需手动编写IDL文件,极大简化了系统集成工作。
4. 主流DDS实现对比分析
ROS2官方支持多个DDS实现,其中CycloneDDS和FastDDS是目前最主流的两个选择。这两个实现虽然都遵循DDS标准,但在架构设计、性能特性、资源占用等方面存在显著差异,适用于不同的应用场景。
4.1 CycloneDDS:轻量级与高性能的平衡
CycloneDDS由Eclipse基金会维护,其前身是ADLINK公司的商业DDS产品。该实现以代码简洁、资源占用低著称,核心库的二进制文件大小不到1MB,非常适合嵌入式系统和资源受限环境。从架构角度看,CycloneDDS采用了事件驱动的设计模式,内部使用单一的网络线程处理所有I/O操作,通过高效的事件分发机制实现低延迟通信。
在网络传输层面,CycloneDDS对UDP Multicast进行了深度优化。实验数据表明,在同一局域网内的进程间通信场景中,CycloneDDS的延迟可低至8微秒,这一数值接近操作系统底层的网络栈性能极限。这种性能优势主要源于其对内存零拷贝技术的运用,以及对网络缓冲区的精细管理。然而,UDP Multicast在跨子网或复杂网络拓扑下的可靠性较低,需要配合额外的路由策略使用。
bash
# 安装CycloneDDS
sudo apt install ros-humble-rmw-cyclonedds-cpp
# 配置环境变量使用CycloneDDS
export RMW_IMPLEMENTATION=rmw_cyclonedds_cppCycloneDDS的配置系统基于XML文件,允许开发者对网络参数、线程模型、内存池大小等进行细粒度调整。例如,可以通过配置文件限制最大消息大小,或调整重传超时参数以适应高延迟网络环境。这种灵活性使其在工业控制、医疗设备等对确定性要求高的场景中得到广泛应用。
xml
<!-- cyclonedds_config.xml - CycloneDDS配置示例 -->
<?xml version="1.0" encoding="UTF-8" ?>
<CycloneDDS xmlns="https://cdds.io/config" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<Domain id="any">
<General>
<!-- 网络接口配置 -->
<NetworkInterfaceAddress>auto</NetworkInterfaceAddress>
<!-- 最大消息大小限制 (字节) -->
<MaxMessageSize>65536</MaxMessageSize>
<!-- 分片大小 -->
<FragmentSize>1280</FragmentSize>
</General>
<Internal>
<!-- 接收缓冲区大小 -->
<SocketReceiveBufferSize min="10MB"/>
<!-- 发送缓冲区大小 -->
<SocketSendBufferSize min="10MB"/>
</Internal>
<Discovery>
<!-- 服务发现配置 -->
<ParticipantIndex>auto</ParticipantIndex>
<!-- 多播地址 -->
<SPDPMulticastAddress>239.255.0.1</SPDPMulticastAddress>
</Discovery>
<Tracing>
<!-- 日志级别: finest, finer, fine, config, info, warning, severe -->
<Verbosity>warning</Verbosity>
<OutputFile>cyclonedds.log</OutputFile>
</Tracing>
</Domain>
</CycloneDDS>
bash
# 使用配置文件启动节点
export CYCLONEDDS_URI=file:///path/to/cyclonedds_config.xml
ros2 run my_package my_node4.2 FastDDS:功能全面的企业级方案
FastDDS(原名FastRTPS)由eProsima公司开发,是ROS2早期版本的默认DDS实现。相比CycloneDDS,FastDDS提供了更丰富的企业级特性,包括安全认证、动态类型支持、统计监控等。其架构设计更加模块化,支持灵活的传输层扩展,除了UDP还可以配置TCP、共享内存等多种传输方式。
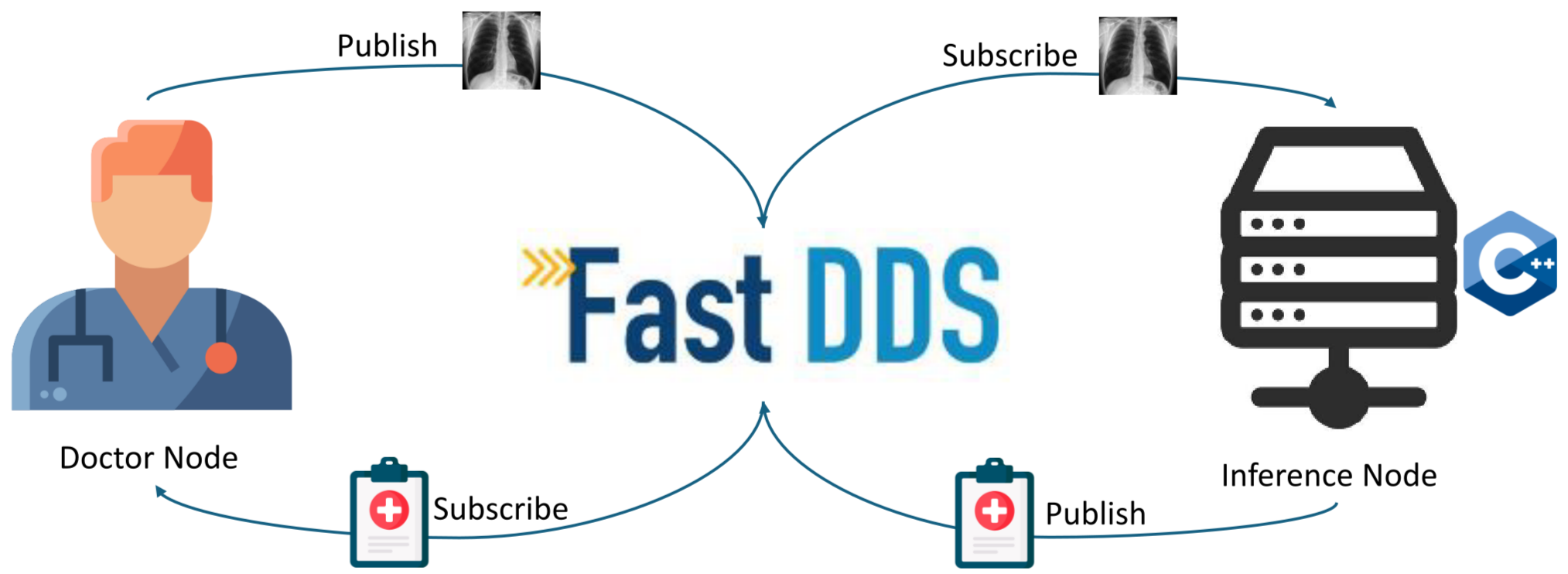
FastDDS的一个显著优势是其共享内存传输能力。在同一主机上的进程间通信时,FastDDS可以绕过网络协议栈,直接通过共享内存交换数据,从而实现数十GB/s的吞吐量和微秒级延迟。实测数据显示,对于1MB大小的消息,FastDDS的共享内存传输延迟约为90微秒,远优于网络传输的毫秒级延迟。这一特性使其在多进程架构的机器人系统中极具吸引力。
cpp
// FastDDS共享内存配置示例
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/image.hpp>
class ImagePublisher : public rclcpp::Node {
public:
ImagePublisher() : Node("image_publisher") {
// 配置QoS参数
auto qos = rclcpp::QoS(rclcpp::KeepLast(10))
.reliable() // 可靠传输
.transient_local() // 保留最后N条消息
.deadline(std::chrono::milliseconds(100)); // 消息发布频率要求
// FastDDS会自动在同机通信时启用共享内存
publisher_ = this->create_publisher<sensor_msgs::msg::Image>(
"camera/image", qos);
}
private:
rclcpp::Publisher<sensor_msgs::msg::Image>::SharedPtr publisher_;
};
xml
<!-- fastdds_config.xml - FastDDS配置示例 -->
<?xml version="1.0" encoding="UTF-8" ?>
<dds>
<profiles xmlns="http://www.eprosima.com/XMLSchemas/fastRTPS_Profiles">
<!-- 共享内存传输配置 -->
<transport_descriptors>
<transport_descriptor>
<transport_id>shm_transport</transport_id>
<type>SHM</type>
<maxMessageSize>65536</maxMessageSize>
<segment_size>524288</segment_size> <!-- 共享内存段大小: 512KB -->
<port_queue_capacity>1024</port_queue_capacity>
</transport_descriptor>
<transport_descriptor>
<transport_id>udp_transport</transport_id>
<type>UDPv4</type>
<sendBufferSize>1048576</sendBufferSize> <!-- 1MB发送缓冲 -->
<receiveBufferSize>1048576</receiveBufferSize> <!-- 1MB接收缓冲 -->
</transport_descriptor>
</transport_descriptors>
<!-- 参与者配置 -->
<participant profile_name="default_participant">
<rtps>
<userTransports>
<transport_id>shm_transport</transport_id>
<transport_id>udp_transport</transport_id>
</userTransports>
<useBuiltinTransports>false</useBuiltinTransports>
<!-- 内存池配置 -->
<allocation>
<participants>
<initial>5</initial>
<maximum>10</maximum>
</participants>
<readers>
<initial>10</initial>
<maximum>50</maximum>
</readers>
<writers>
<initial>10</initial>
<maximum>50</maximum>
</writers>
</allocation>
</rtps>
</participant>
<!-- 数据写入器配置 -->
<data_writer profile_name="high_throughput_writer">
<qos>
<reliability>
<kind>RELIABLE</kind>
<max_blocking_time>
<sec>1</sec>
</max_blocking_time>
</reliability>
<durability>
<kind>TRANSIENT_LOCAL</kind>
</durability>
<history>
<kind>KEEP_LAST</kind>
<depth>100</depth>
</history>
</qos>
<historyMemoryPolicy>PREALLOCATED_WITH_REALLOC</historyMemoryPolicy>
</data_writer>
</profiles>
</dds>
bash
# 使用FastDDS配置文件
export FASTRTPS_DEFAULT_PROFILES_FILE=/path/to/fastdds_config.xml
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
# 启用FastDDS统计模块
export FASTDDS_STATISTICS=HISTORY_LATENCY_TOPIC;NETWORK_LATENCY_TOPIC
ros2 run my_package my_nodeFastDDS的另一个特色功能是实时性分析工具。开发者可以通过统计API获取每条消息的端到端延迟、丢包率、队列长度等指标,这对于诊断系统性能瓶颈非常有价值。此外,FastDDS还支持DDS-Security规范,提供基于证书的身份认证和数据加密,满足安全关键应用的需求。
然而,功能的丰富也带来了复杂度的增加。FastDDS的二进制文件大小约为5-8MB,内存占用也明显高于CycloneDDS。在资源受限的嵌入式平台上,这一差异可能成为选型的关键因素。
4.3 Zenoh:面向广域网的下一代协议
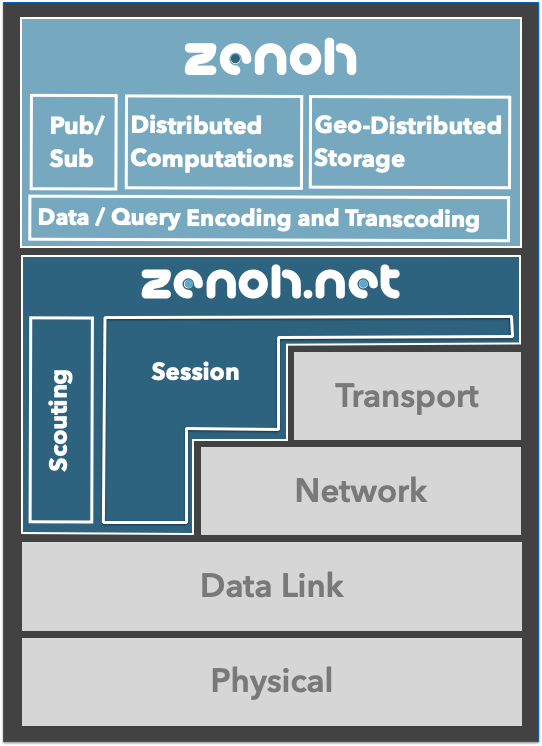
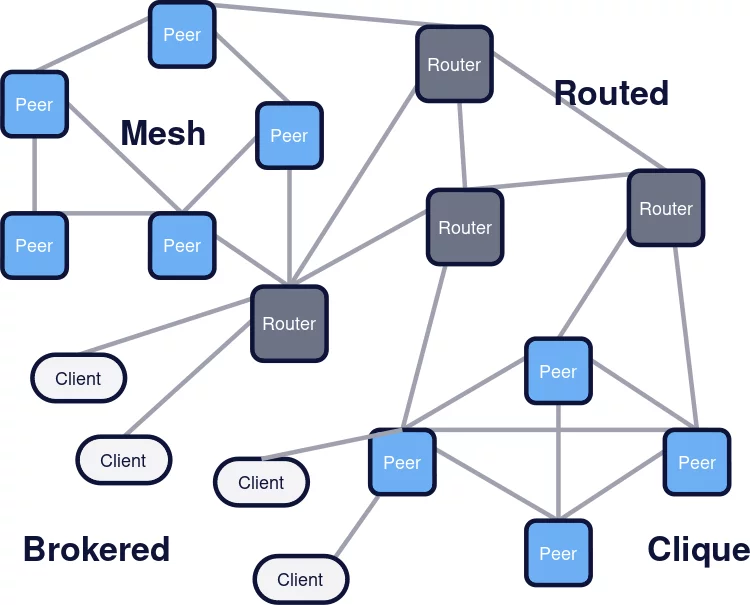
Zenoh是由Eclipse基金会支持的新型数据传输协议,其设计初衷是解决DDS在广域网环境下的适用性问题。DDS的服务发现机制严重依赖UDP Multicast,这在跨子网或互联网环境中难以直接工作。而Zenoh采用了分层路由架构,支持Peer、Client、Router三种节点角色,可以灵活构建从边缘到云的多级传输拓扑。
Zenoh的核心创新在于其零拷贝的协议设计和高效的序列化机制。相比DDS的RTPS协议,Zenoh的报文格式更加紧凑,协议开销降低了60%以上。在局域网环境下,Zenoh的对等模式延迟可达10微秒,接近CycloneDDS的水平。而在广域网场景中,Zenoh通过路由器级联和智能缓存策略,能够在保持低延迟的同时实现跨区域的数据分发。
bash
# 安装Zenoh RMW插件
sudo apt install ros-humble-rmw-zenoh-cpp
# 配置使用Zenoh中间件
export RMW_IMPLEMENTATION=rmw_zenoh_cpp
# 启动Zenoh路由器(类似roscore的角色)
ros2 run rmw_zenoh_cpp rmw_zenohdZenoh的另一个显著特点是其支持多种通信范式。除了传统的发布-订阅模式,Zenoh还原生支持查询-响应(Query-Response)和分布式存储(Storage)模式 。这使得开发者可以直接通过中间件实现服务调用和状态同步,而无需在应用层构建额外的协议层。在物联网和边缘计算场景中,这种灵活性尤为宝贵。
cpp
// Zenoh在ROS2中的使用示例(C++)
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/temperature.hpp>
#include <sensor_msgs/msg/image.hpp>
#include <std_msgs/msg/string.hpp>
#include <chrono>
#include <memory>
class ZenohPublisherNode : public rclcpp::Node {
public:
ZenohPublisherNode() : Node("zenoh_publisher") {
// Zenoh的优势:支持跨广域网通信,QoS配置灵活
auto qos = rclcpp::QoS(rclcpp::KeepLast(10))
.best_effort() // Zenoh的零拷贝协议优化
.durability_volatile();
// 传感器数据发布器
temp_pub_ = this->create_publisher<sensor_msgs::msg::Temperature>(
"robot/sensors/temperature", qos);
// 状态信息发布器(Zenoh支持分布式存储)
state_pub_ = this->create_publisher<std_msgs::msg::String>(
"robot/state", qos);
// 图像数据发布器(Zenoh对大消息优化)
image_pub_ = this->create_publisher<sensor_msgs::msg::Image>(
"camera/image_raw", qos);
// 定时发布数据
timer_ = this->create_wall_timer(
std::chrono::milliseconds(100),
std::bind(&ZenohPublisherNode::publish_data, this));
RCLCPP_INFO(this->get_logger(),
"Zenoh发布节点已启动 - 支持跨广域网、云边协同传输");
}
private:
void publish_data() {
// 发布温度数据
auto temp_msg = sensor_msgs::msg::Temperature();
temp_msg.header.stamp = this->now();
temp_msg.header.frame_id = "temperature_sensor";
temp_msg.temperature = 25.3 + (rand() % 100) / 100.0;
temp_msg.variance = 0.1;
temp_pub_->publish(temp_msg);
// 发布状态信息(Zenoh的分布式存储会自动缓存)
auto state_msg = std_msgs::msg::String();
state_msg.data = "running";
state_pub_->publish(state_msg);
// 发布图像数据(Zenoh对大消息进行零拷贝优化)
auto image_msg = sensor_msgs::msg::Image();
image_msg.header.stamp = this->now();
image_msg.height = 480;
image_msg.width = 640;
image_msg.encoding = "rgb8";
image_msg.step = image_msg.width * 3;
image_msg.data.resize(image_msg.height * image_msg.step);
image_pub_->publish(image_msg);
RCLCPP_DEBUG(this->get_logger(),
"已发布数据 - 温度: %.2f°C, 状态: %s",
temp_msg.temperature, state_msg.data.c_str());
}
rclcpp::Publisher<sensor_msgs::msg::Temperature>::SharedPtr temp_pub_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr state_pub_;
rclcpp::Publisher<sensor_msgs::msg::Image>::SharedPtr image_pub_;
rclcpp::TimerBase::SharedPtr timer_;
};
class ZenohSubscriberNode : public rclcpp::Node {
public:
ZenohSubscriberNode() : Node("zenoh_subscriber") {
auto qos = rclcpp::QoS(rclcpp::KeepLast(10))
.best_effort()
.durability_volatile();
// 订阅温度数据(可以从云端或边缘节点接收)
temp_sub_ = this->create_subscription<sensor_msgs::msg::Temperature>(
"robot/sensors/temperature",
qos,
std::bind(&ZenohSubscriberNode::temp_callback, this, std::placeholders::_1));
// 订阅状态信息(Zenoh支持查询历史状态)
state_sub_ = this->create_subscription<std_msgs::msg::String>(
"robot/state",
qos,
std::bind(&ZenohSubscriberNode::state_callback, this, std::placeholders::_1));
// 订阅图像数据(Zenoh在大消息传输上性能优异)
image_sub_ = this->create_subscription<sensor_msgs::msg::Image>(
"camera/image_raw",
qos,
std::bind(&ZenohSubscriberNode::image_callback, this, std::placeholders::_1));
RCLCPP_INFO(this->get_logger(),
"Zenoh订阅节点已启动 - 可接收来自云端、边缘、本地的数据");
}
private:
void temp_callback(const sensor_msgs::msg::Temperature::SharedPtr msg) {
RCLCPP_INFO(this->get_logger(),
"收到温度: %.2f°C (来自 %s)",
msg->temperature, msg->header.frame_id.c_str());
}
void state_callback(const std_msgs::msg::String::SharedPtr msg) {
RCLCPP_INFO(this->get_logger(),
"机器人状态: %s", msg->data.c_str());
}
void image_callback(const sensor_msgs::msg::Image::SharedPtr msg) {
RCLCPP_INFO(this->get_logger(),
"收到图像: %dx%d, 大小: %zu bytes (Zenoh零拷贝传输)",
msg->width, msg->height, msg->data.size());
}
rclcpp::Subscription<sensor_msgs::msg::Temperature>::SharedPtr temp_sub_;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr state_sub_;
rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr image_sub_;
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
// 根据命令行参数选择发布或订阅模式
if (argc > 1 && std::string(argv[1]) == "pub") {
auto node = std::make_shared<ZenohPublisherNode>();
rclcpp::spin(node);
} else {
auto node = std::make_shared<ZenohSubscriberNode>();
rclcpp::spin(node);
}
rclcpp::shutdown();
return 0;
}
json
// zenoh_config.json5 - Zenoh配置示例
{
// 节点模式: peer(对等), client(客户端), router(路由器)
mode: "peer",
// 连接配置
connect: {
endpoints: [
"tcp/192.168.1.100:7447", // 远程路由器地址
"tcp/cloud.example.com:7447" // 云端路由器
]
},
// 监听配置(用于router模式)
listen: {
endpoints: [
"tcp/0.0.0.0:7447"
]
},
// 共享内存配置
transport: {
shared_memory: {
enabled: true
},
unicast: {
// 连接保持时间
lease: 10000,
// 心跳间隔
keep_alive: 1000
}
},
// QoS配置
qos: {
// 消息可靠性
reliability: "reliable", // 或 "best_effort"
// 消息优先级
priority: "data", // real_time, interactive, data, background
// 拥塞控制
congestion_control: "block" // drop, block
},
// 插件配置
plugins: {
// 存储插件(用于持久化)
storage_manager: {
volumes: {
memory: {
// 内存存储
}
},
storages: {
demo: {
key_expr: "robot/state/**",
volume: "memory"
}
}
}
}
}
bash
# CMakeLists.txt 配置示例
# find_package(rclcpp REQUIRED)
# find_package(sensor_msgs REQUIRED)
# find_package(std_msgs REQUIRED)
#
# add_executable(zenoh_node src/zenoh_node.cpp)
# ament_target_dependencies(zenoh_node
# rclcpp
# sensor_msgs
# std_msgs
# )
# 使用Zenoh配置文件
export ZENOH_CONFIG=/path/to/zenoh_config.json5
export RMW_IMPLEMENTATION=rmw_zenoh_cpp
# 启动Zenoh路由器(用于跨网络通信)
ros2 run rmw_zenoh_cpp rmw_zenohd --config /path/to/zenoh_config.json5 &
# 等待路由器启动
sleep 2
# 运行发布节点(可以在本地或云端)
ros2 run my_package zenoh_node pub
# 在另一个终端运行订阅节点(可以跨广域网接收)
ros2 run my_package zenoh_node sub
# Zenoh的优势体现:
# 1. 发布和订阅节点可以在不同网络区域
# 2. 通过路由器自动进行数据中继
# 3. 支持云边协同,边缘设备到云端的无缝通信Zenoh的共享内存支持也值得关注。通过配置环境变量,可以在同机通信时启用共享内存传输,性能表现与Iceoryx相当。测试数据显示,1MB消息的传输延迟可控制在10微秒以内,吞吐量可达50GB/s以上。这种同时兼顾局域网和广域网性能的能力,使Zenoh成为云边协同架构的理想选择。
4.4 Iceoryx:极致性能的共享内存方案
Iceoryx是由Eclipse基金会和博世等汽车厂商联合开发的高性能进程间通信框架,其核心目标是实现零拷贝的共享内存传输。与DDS的网络协议栈不同,Iceoryx完全绕过了操作系统的网络层,数据在发布者和订阅者之间直接通过共享内存交换,理论延迟仅受限于内存总线带宽和CPU缓存一致性协议。
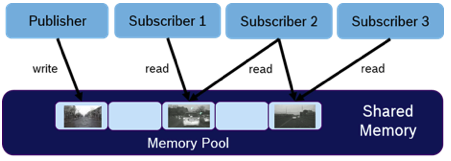
Iceoryx的架构由RouDi(Routing and Discovery)守护进程和客户端库两部分组成。RouDi负责管理共享内存池、协调进程间的连接建立,以及处理订阅关系的动态变化。客户端库则提供了发布-订阅API,应用程序通过这些API访问共享内存区域,实现数据的零拷贝传递。实测数据显示,Iceoryx的端到端延迟可低至1.5微秒,是所有测试中间件中的最优值。
bash
# 安装Iceoryx及ROS2绑定
sudo apt install ros-humble-rmw-iceoryx-cpp
# 启动RouDi守护进程(使用默认配置)
iox-roudi
# 或使用自定义配置启动
iox-roudi -c /path/to/roudi_config.toml
# 配置使用Iceoryx
export RMW_IMPLEMENTATION=rmw_iceoryx_cpp
cpp
// Iceoryx发布订阅示例
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/point_cloud2.hpp>
class IceoryxPublisher : public rclcpp::Node {
public:
IceoryxPublisher() : Node("iceoryx_publisher") {
// 配置QoS - Iceoryx自动使用零拷贝传输
auto qos = rclcpp::QoS(rclcpp::KeepLast(10))
.best_effort() // 最适合Iceoryx的模式
.durability_volatile();
publisher_ = this->create_publisher<sensor_msgs::msg::PointCloud2>(
"point_cloud", qos);
timer_ = this->create_wall_timer(
std::chrono::milliseconds(100),
std::bind(&IceoryxPublisher::publish_data, this));
}
private:
void publish_data() {
auto msg = std::make_unique<sensor_msgs::msg::PointCloud2>();
// 填充点云数据...
msg->height = 480;
msg->width = 640;
msg->data.resize(msg->height * msg->width * 16); // 16字节每点
// Iceoryx会通过共享内存零拷贝传输这个大消息
publisher_->publish(std::move(msg));
RCLCPP_INFO(this->get_logger(), "发布点云数据(零拷贝)");
}
rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};
bash
# roudi_config.toml - Iceoryx RouDi配置示例
[general]
version = 1
# 共享内存配置
[[segment]]
[[segment.mempool]]
size = 128 # 128字节的内存块
count = 10000 # 10000个块,适合小消息
[[segment.mempool]]
size = 1024 # 1KB内存块
count = 5000 # 5000个块
[[segment.mempool]]
size = 16384 # 16KB内存块
count = 1000 # 1000个块
[[segment.mempool]]
size = 131072 # 128KB内存块
count = 200 # 200个块,适合中等消息
[[segment.mempool]]
size = 1048576 # 1MB内存块
count = 100 # 100个块,适合大消息(如图像)
[[segment.mempool]]
size = 4194304 # 4MB内存块
count = 50 # 50个块,适合点云数据
# 多个段配置(可选,用于隔离不同应用)
[[segment]]
reader = "camera_group"
writer = "camera_group"
[[segment.mempool]]
size = 2097152 # 2MB块专用于相机数据
count = 30
bash
# Iceoryx环境配置脚本
#!/bin/bash
# 设置共享内存限制(需要root权限)
# 查看当前限制
sysctl kernel.shmmax
sysctl kernel.shmall
# 设置更大的共享内存限制(单位:字节)
sudo sysctl -w kernel.shmmax=2147483648 # 2GB
sudo sysctl -w kernel.shmall=2147483648 # 2GB
# 永久生效(写入/etc/sysctl.conf)
echo "kernel.shmmax=2147483648" | sudo tee -a /etc/sysctl.conf
echo "kernel.shmall=2147483648" | sudo tee -a /etc/sysctl.conf
# 启动RouDi守护进程
export IOX_ROUDI_CONFIG=/path/to/roudi_config.toml
iox-roudi -c $IOX_ROUDI_CONFIG &
# 等待RouDi启动
sleep 2
# 配置ROS2使用Iceoryx
export RMW_IMPLEMENTATION=rmw_iceoryx_cpp
# 运行应用
ros2 run my_package my_nodeIceoryx的一个关键设计是其内存池管理策略。系统在启动时预分配固定大小的内存池,不同大小的消息被分配到不同的内存块中,避免了运行时的动态内存分配。这种设计虽然牺牲了一定的灵活性,但换来了确定性的性能表现和极低的延迟抖动,非常适合汽车、工业控制等硬实时场景。
然而,Iceoryx的适用范围也相对受限。由于其依赖共享内存机制,只能在同一主机上的进程间通信,无法跨网络使用。在分布式机器人系统中,往往需要结合DDS或Zenoh等网络协议,形成混合传输架构。此外,Iceoryx对消息大小有严格限制,超大消息(如高分辨率图像)可能需要特殊处理。
4.5 Micro XRCE-DDS:嵌入式设备的轻量级方案
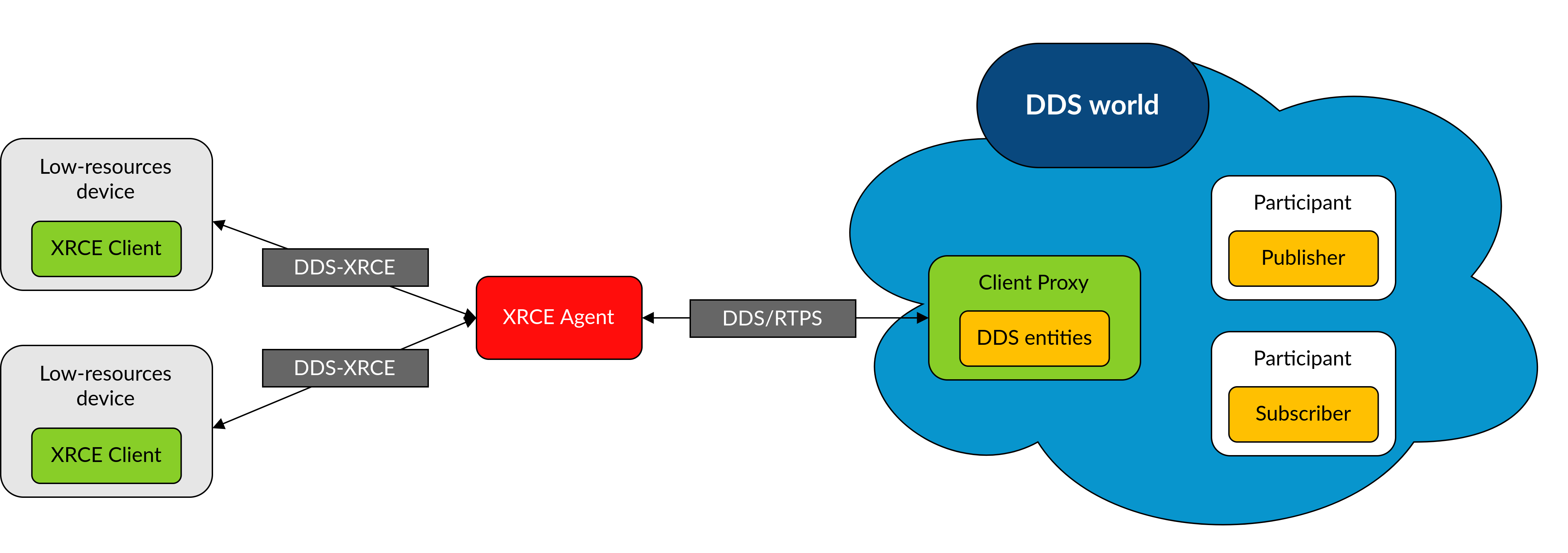
Micro XRCE-DDS由eProsima公司开发,是一个实现OMG定义的DDS-XRCE(DDS for eXtremely Resource Constrained Environments)协议的轻量级库。其核心设计目标是让资源受限的设备(如微控制器、传感器节点)能够像标准DDS参与者一样与DDS世界进行通信。该方案遵循客户端/代理(Client/Agent)范式,将通信负担从资源受限的设备转移到功能更强大的网关设备上。
Micro XRCE-DDS的架构由两个核心组件构成:
-
Micro XRCE-DDS Client(客户端):极度轻量级的实体,设计用于在RAM仅几KB的微控制器上运行。客户端库经过高度优化,代码占用空间小于20KB,运行时内存消耗可控制在几KB以内。
-
Micro XRCE-DDS Agent(代理):运行在资源充足设备上的代理服务,负责将客户端与DDS全局数据空间连接。代理处理复杂的DDS协议栈,执行服务发现、QoS协商等任务,使客户端可以专注于应用逻辑。
Micro XRCE-DDS在嵌入式和物联网场景中表现出色,特别适合PX4飞控、ROS 2机器人传感器节点等应用。通过客户端-代理架构,实现了极低的资源占用(客户端库小于20KB)和灵活的传输支持(串口、UDP、TCP)。PX4已将其作为标准中间件,实现uORB消息与ROS 2主题的无缝集成。
cpp
// ========== 示例1:Micro XRCE-DDS客户端代码(运行在微控制器上)==========
// 适用于STM32、ESP32、Arduino等嵌入式平台
#include <uxr/client/client.h>
#include <ucdr/microcdr.h>
#include <stdio.h>
#include <string.h>
#define STREAM_HISTORY 4
#define BUFFER_SIZE UXR_CONFIG_UDP_TRANSPORT_MTU * STREAM_HISTORY
// HelloWorld消息结构(简化示例)
typedef struct HelloWorld {
uint32_t index;
char message[128];
} HelloWorld;
// 序列化函数
bool serialize_HelloWorld(ucdrBuffer* writer, const HelloWorld* data) {
return ucdr_serialize_uint32_t(writer, data->index) &&
ucdr_serialize_string(writer, data->message);
}
// 反序列化函数
bool deserialize_HelloWorld(ucdrBuffer* reader, HelloWorld* data) {
return ucdr_deserialize_uint32_t(reader, &data->index) &&
ucdr_deserialize_string(reader, data->message, sizeof(data->message));
}
int main(int argc, char** argv) {
// ========== 第1步:初始化UDP传输 ==========
// 配置连接到运行在配套计算机上的Agent
const char* agent_ip = "192.168.1.100"; // Agent的IP地址
const char* agent_port = "8888"; // Agent监听端口
uxrUDPTransport transport;
if (!uxr_init_udp_transport(&transport, UXR_IPv4, agent_ip, agent_port)) {
printf("❌ 错误:无法创建UDP传输\n");
return 1;
}
printf("✅ UDP传输初始化成功 -> %s:%s\n", agent_ip, agent_port);
// ========== 第2步:创建会话 ==========
uxrSession session;
uxr_init_session(&session, &transport.comm, 0x12345678); // 会话密钥
if (!uxr_create_session(&session)) {
printf("❌ 错误:无法连接到Agent\n");
return 1;
}
printf("✅ 会话创建成功,已连接到Agent\n");
// ========== 第3步:创建流(用于数据传输)==========
uint8_t output_buffer[BUFFER_SIZE];
uxrStreamId reliable_out = uxr_create_output_reliable_stream(
&session, output_buffer, BUFFER_SIZE, STREAM_HISTORY);
uint8_t input_buffer[BUFFER_SIZE];
uxrStreamId reliable_in = uxr_create_input_reliable_stream(
&session, input_buffer, BUFFER_SIZE, STREAM_HISTORY);
// ========== 第4步:创建DDS实体(通过XML配置)==========
// 4.1 创建参与者
uxrObjectId participant_id = uxr_object_id(0x01, UXR_PARTICIPANT_ID);
const char* participant_xml =
"<dds>"
" <participant>"
" <rtps><name>micro_xrce_participant</name></rtps>"
" </participant>"
"</dds>";
uint16_t participant_req = uxr_buffer_create_participant_xml(
&session, reliable_out, participant_id, 0, participant_xml, UXR_REPLACE);
// 4.2 创建主题
uxrObjectId topic_id = uxr_object_id(0x01, UXR_TOPIC_ID);
const char* topic_xml =
"<dds>"
" <topic>"
" <name>rt/micro_device/hello</name>" // 主题名称
" <dataType>HelloWorld</dataType>"
" </topic>"
"</dds>";
uint16_t topic_req = uxr_buffer_create_topic_xml(
&session, reliable_out, topic_id, participant_id, topic_xml, UXR_REPLACE);
// 4.3 创建发布者
uxrObjectId publisher_id = uxr_object_id(0x01, UXR_PUBLISHER_ID);
const char* publisher_xml = ""; // 使用默认配置
uint16_t publisher_req = uxr_buffer_create_publisher_xml(
&session, reliable_out, publisher_id, participant_id, publisher_xml, UXR_REPLACE);
// 4.4 创建DataWriter
uxrObjectId datawriter_id = uxr_object_id(0x01, UXR_DATAWRITER_ID);
const char* datawriter_xml =
"<dds>"
" <data_writer>"
" <topic><kind>NO_KEY</kind><name>rt/micro_device/hello</name></topic>"
" </data_writer>"
"</dds>";
uint16_t datawriter_req = uxr_buffer_create_datawriter_xml(
&session, reliable_out, datawriter_id, publisher_id, datawriter_xml, UXR_REPLACE);
// ========== 第5步:等待实体创建完成 ==========
uint8_t status[4];
uint16_t requests[4] = {participant_req, topic_req, publisher_req, datawriter_req};
if (!uxr_run_session_until_all_status(&session, 1000, requests, status, 4)) {
printf("❌ 创建实体失败: participant=%d, topic=%d, publisher=%d, datawriter=%d\n",
status[0], status[1], status[2], status[3]);
return 1;
}
printf("✅ 所有DDS实体创建成功\n");
// ========== 第6步:发布数据 ==========
printf("🚀 开始发布数据...\n");
uint32_t count = 0;
bool connected = true;
while (connected && count < 100) {
// 准备消息
HelloWorld topic_data;
topic_data.index = ++count;
snprintf(topic_data.message, sizeof(topic_data.message),
"Hello from microcontroller! #%u", count);
// 序列化到输出流
ucdrBuffer mb;
uint32_t topic_size = sizeof(HelloWorld); // 简化,实际需要计算
uxr_prepare_output_stream(&session, reliable_out, datawriter_id, &mb, topic_size);
serialize_HelloWorld(&mb, &topic_data);
printf("📤 发送: %s (index=%u)\n", topic_data.message, topic_data.index);
// 运行会话(发送数据并接收确认)
connected = uxr_run_session_time(&session, 100); // 100ms超时
// 微控制器上的延时函数(具体实现取决于平台)
// delay_ms(500); // 500ms发送一次
}
// ========== 第7步:清理资源 ==========
uxr_delete_session(&session);
uxr_close_udp_transport(&transport);
printf("✅ 会话已关闭\n");
return 0;
}
cpp
// ========== 示例2:ROS2侧的标准订阅节点(运行在配套计算机上)==========
// 通过Micro XRCE-DDS Agent,ROS2节点可以接收来自嵌入式设备的数据
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/string.hpp>
// 自定义消息类型(需要与嵌入式端一致)
struct HelloWorldMsg {
uint32_t index;
std::string message;
};
class MicroXRCESubscriber : public rclcpp::Node {
public:
MicroXRCESubscriber() : Node("micro_xrce_subscriber") {
// 订阅来自嵌入式设备的数据
// 主题名称必须与嵌入式端一致:rt/micro_device/hello
auto qos = rclcpp::QoS(rclcpp::KeepLast(10))
.best_effort() // 与嵌入式端QoS匹配
.durability_volatile();
subscription_ = this->create_subscription<std_msgs::msg::String>(
"rt/micro_device/hello", // 与客户端定义的主题名一致!
qos,
std::bind(&MicroXRCESubscriber::topic_callback, this, std::placeholders::_1));
RCLCPP_INFO(this->get_logger(),
"✅ ROS2订阅节点启动,等待来自Micro XRCE-DDS客户端的数据...");
RCLCPP_INFO(this->get_logger(),
"📡 监听主题: rt/micro_device/hello");
RCLCPP_INFO(this->get_logger(),
"💡 确保Micro XRCE-DDS Agent正在运行: MicroXRCEAgent udp4 -p 8888");
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) {
// 解析来自嵌入式设备的数据
RCLCPP_INFO(this->get_logger(),
"📥 收到来自微控制器的消息: '%s'", msg->data.c_str());
// 这里可以进行进一步处理,如:
// - 解析消息内容
// - 存储到数据库
// - 转发到其他ROS2节点
// - 触发控制逻辑等
message_count_++;
if (message_count_ % 10 == 0) {
RCLCPP_INFO(this->get_logger(),
"📊 已接收 %u 条消息", message_count_);
}
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
uint32_t message_count_ = 0;
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
RCLCPP_INFO(rclcpp::get_logger("main"), "========================================");
RCLCPP_INFO(rclcpp::get_logger("main"), " Micro XRCE-DDS 通信架构说明");
RCLCPP_INFO(rclcpp::get_logger("main"), "========================================");
RCLCPP_INFO(rclcpp::get_logger("main"), "");
RCLCPP_INFO(rclcpp::get_logger("main"), "【微控制器端】");
RCLCPP_INFO(rclcpp::get_logger("main"), " └─ Micro XRCE-DDS Client (轻量级<20KB)");
RCLCPP_INFO(rclcpp::get_logger("main"), " └─ 发布数据到主题");
RCLCPP_INFO(rclcpp::get_logger("main"), "");
RCLCPP_INFO(rclcpp::get_logger("main"), "【配套计算机】");
RCLCPP_INFO(rclcpp::get_logger("main"), " ├─ Micro XRCE-DDS Agent (代理)");
RCLCPP_INFO(rclcpp::get_logger("main"), " │ └─ 连接客户端到DDS网络");
RCLCPP_INFO(rclcpp::get_logger("main"), " └─ ROS2 Node (本程序)");
RCLCPP_INFO(rclcpp::get_logger("main"), " └─ 订阅并处理数据");
RCLCPP_INFO(rclcpp::get_logger("main"), "");
RCLCPP_INFO(rclcpp::get_logger("main"), "========================================");
auto node = std::make_shared<MicroXRCESubscriber>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
bash
# ========================================
# 完整部署指南:Micro XRCE-DDS
# ========================================
# ========== 步骤1:安装Micro XRCE-DDS Agent ==========
echo "📦 安装Micro XRCE-DDS Agent..."
# 方式1:从源码编译(推荐,最新版本)
git clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git
cd Micro-XRCE-DDS-Agent && mkdir build && cd build
cmake ..
make -j$(nproc)
sudo make install
sudo ldconfig /usr/local/lib/
# 方式2:通过Snap安装(快速,但可能不是最新版)
# sudo snap install micro-xrce-dds-agent --edge # 使用edge版本避免已知bug
# 验证安装
MicroXRCEAgent --version
# ========== 步骤2:安装Micro XRCE-DDS Client库(嵌入式端)==========
echo "📦 安装客户端库(用于嵌入式开发)..."
git clone https://github.com/eProsima/Micro-XRCE-DDS-Client.git
cd Micro-XRCE-DDS-Client && mkdir build && cd build
cmake .. -DUCLIENT_BUILD_EXAMPLES=ON # 编译示例代码
make -j$(nproc)
sudo make install
sudo ldconfig /usr/local/lib/
# ========== 步骤3:创建ROS2工作空间和包 ==========
echo "🔨 创建ROS2工作空间..."
mkdir -p ~/ros2_micro_xrce_ws/src
cd ~/ros2_micro_xrce_ws/src
ros2 pkg create --build-type ament_cmake micro_xrce_example \
--dependencies rclcpp std_msgs
# 将上面的C++代码保存到对应文件
# src/micro_xrce_client.cpp -> 嵌入式客户端代码
# src/micro_xrce_subscriber.cpp -> ROS2订阅节点代码
# ========== 步骤4:配置CMakeLists.txt ==========
cat >> ~/ros2_micro_xrce_ws/src/micro_xrce_example/CMakeLists.txt << 'EOF'
# ===== 嵌入式客户端可执行文件 =====
# 注意:实际部署时这部分代码应该在微控制器上编译
find_package(microxrcedds_client REQUIRED)
add_executable(micro_xrce_client src/micro_xrce_client.cpp)
target_link_libraries(micro_xrce_client microxrcedds_client microcdr)
# ===== ROS2订阅节点 =====
add_executable(micro_xrce_subscriber src/micro_xrce_subscriber.cpp)
ament_target_dependencies(micro_xrce_subscriber rclcpp std_msgs)
install(TARGETS
micro_xrce_client
micro_xrce_subscriber
DESTINATION lib/${PROJECT_NAME}
)
EOF
# ========== 步骤5:编译工作空间 ==========
echo "⚙️ 编译ROS2工作空间..."
cd ~/ros2_micro_xrce_ws
colcon build --symlink-install
source install/setup.bash
# ========== 步骤6:运行完整系统 ==========
echo "🚀 启动Micro XRCE-DDS系统..."
# 终端1:启动Agent(UDP模式)
MicroXRCEAgent udp4 -p 8888 -v 6 # -v 6启用详细日志
# 终端2:运行嵌入式客户端(模拟微控制器)
# 注意:修改代码中的IP地址为Agent所在主机IP
ros2 run micro_xrce_example micro_xrce_client
# 终端3:运行ROS2订阅节点
ros2 run micro_xrce_example micro_xrce_subscriber
# ========== 步骤7:验证通信 ==========
echo "🔍 验证数据流..."
# 查看所有主题(应该能看到rt/micro_device/hello)
ros2 topic list
# 直接echo主题数据
ros2 topic echo /rt/micro_device/hello
# 查看主题详细信息
ros2 topic info /rt/micro_device/hello --verbose
# 查看发布频率
ros2 topic hz /rt/micro_device/hello
# ========== 其他传输模式配置 ==========
# 串口模式(适合通过USB直连微控制器)
MicroXRCEAgent serial --dev /dev/ttyUSB0 -b 921600
# TCP模式
MicroXRCEAgent tcp4 -p 2019
# 多客户端模式(支持多个设备同时连接)
MicroXRCEAgent udp4 -p 8888 -d # -d启用发现模式
# ========== 故障排查 ==========
# 1. 检查Agent是否运行
ps aux | grep MicroXRCEAgent
netstat -ulnp | grep 8888
# 2. 监控UDP数据包
sudo tcpdump -i any udp port 8888 -X -vv
# 3. 检查ROS2 DDS域设置
echo $ROS_DOMAIN_ID # 确保Agent和ROS2节点在同一域
# 4. 查看Agent日志(使用详细模式)
MicroXRCEAgent udp4 -p 8888 -v 6 2>&1 | tee agent.log
# 5. 测试网络连通性
ping 192.168.1.100 # Agent所在主机
# 6. 检查防火墙规则
sudo ufw status
sudo ufw allow 8888/udp
# ========== PX4集成示例 ==========
# PX4飞控上启动XRCE-DDS客户端
# 连接到运行在192.168.1.100:8888的Agent
# pxh> uxrce_dds_client start -t udp -h 192.168.1.100 -p 8888
# 查看PX4发布的主题
# ros2 topic list | grep fmu
# 订阅PX4的IMU数据
# ros2 topic echo /fmu/out/vehicle_imu
# 向PX4发送控制指令
# ros2 topic pub /fmu/in/vehicle_command ...
# ========== 性能监控 ==========
# 查看Agent资源占用
top -p $(pgrep MicroXRCEAgent)
# 统计消息吞吐量
ros2 topic bw /rt/micro_device/hello
# 测量端到端延迟(需要自定义工具)
# echo "时间戳在消息中传递,在ROS2端计算差值"5. 性能对比测试
性能评估是中间件选型的关键依据。本节基于台湾大学研究团队的测试数据,以及社区广泛认可的基准测试结果,对主流中间件在吞吐量、延迟两个核心指标上的表现进行深入分析。
5.1 进程间通信延迟对比
在单机进程间通信场景中,延迟是衡量实时性的关键指标。测试使用64字节的小消息,模拟传感器数据或控制指令的传输场景。结果显示,Iceoryx以2.4微秒的延迟遥遥领先,这得益于其共享内存的零拷贝设计。FastDDS的共享内存模式延迟为3.95微秒,表现同样出色。CycloneDDS通过UDP Multicast实现了7.35微秒的低延迟,证明其网络层优化的有效性。
Zenoh在对等模式下的延迟为71.81微秒,虽然相对较高,但考虑到其同时支持广域网通信的架构复杂度,这一数值仍属于可接受范围。Micro XRCE-DDS的延迟约为50-200微秒(取决于传输方式和Agent性能),其设计重点不在绝对延迟,而在极低的资源占用。值得注意的是,在跨网络通信时,各中间件的延迟差距会显著缩小,此时网络传播延迟成为主导因素。
| 中间件 | 延迟(微秒) | 传输机制 | 资源占用 |
|---|---|---|---|
| Iceoryx | 2.4 | 共享内存 | 中等 |
| FastDDS | 3.95 | 共享内存 | 较高 |
| CycloneDDS | 7.35 | UDP Multicast | 低 |
| Zenoh(对等模式) | 71.81 | 网络/共享内存 | 中等 |
| Micro XRCE-DDS(经代理) | 50-200 | 串口/UDP/TCP+代理 | 极低(<20KB) |
从延迟稳定性角度看,基于共享内存的方案表现更优。Iceoryx和FastDDS的延迟抖动均在纳秒级别,而基于网络传输的方案受操作系统调度影响,抖动可达微秒级。在硬实时系统中,延迟的可预测性往往比绝对值更重要,这使得Iceoryx在汽车和工业控制领域备受青睐。
5.2 吞吐量测试:从小包到大包的性能演变
吞吐量测试展现了中间件在不同消息尺寸下的数据传输能力。测试结果呈现出明显的分段特性:小消息场景下受消息处理频率限制,大消息场景下受带宽和序列化开销限制。
在小消息(1-4KB)场景中,Iceoryx以超过4M msg/s的消息速率占据绝对优势,Zenoh约为14K msg/s,CycloneDDS为2M msg/s,FastDDS约为250K msg/s。此时的瓶颈主要在于消息处理的CPU开销,共享内存方案避免了系统调用和网络栈遍历,因此占据明显优势。
当消息尺寸增长到8KB及以上时,吞吐量的衡量指标转向比特率更为合理。Zenoh在8KB消息下达到峰值性能,对等模式可实现67Gbps的吞吐量,接近100Gb以太网的理论上限。FastDDS的共享内存传输在1MB消息下可达23Gbps。CycloneDDS的峰值吞吐量约为26Gbps,出现在16KB-64KB消息尺寸区间。
python
# 吞吐量测试数据可视化代码示例
import matplotlib.pyplot as plt
import numpy as np
message_sizes = [1, 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024] # KB
iceoryx_throughput = [32, 32, 32, 32, 32, 32, 32, 32, 32, 32, 32] # Gbps
zenoh_throughput = [0.1, 0.15, 0.3, 12, 24, 35, 50, 60, 67, 65, 62]
cyclonedds_throughput = [0.06, 0.12, 0.24, 3, 12, 18, 24, 26, 25, 20, 15]
fastdds_throughput = [0.03, 0.06, 0.12, 0.3, 1.5, 4, 8, 12, 18, 22, 23]
plt.figure(figsize=(12, 6))
plt.plot(message_sizes, iceoryx_throughput, 'o-', label='Iceoryx', linewidth=2)
plt.plot(message_sizes, zenoh_throughput, 's-', label='Zenoh', linewidth=2)
plt.plot(message_sizes, cyclonedds_throughput, '^-', label='CycloneDDS', linewidth=2)
plt.plot(message_sizes, fastdds_throughput, 'd-', label='FastDDS', linewidth=2)
plt.xscale('log')
plt.xlabel('消息大小 (KB)', fontsize=12)
plt.ylabel('吞吐量 (Gbps)', fontsize=12)
plt.title('不同中间件的吞吐量对比', fontsize=14)
plt.legend(fontsize=10)
plt.grid(True, alpha=0.3)
plt.show()从数据中可以观察到一个有趣现象:Zenoh在大消息场景下的性能优势显著扩大。对于4MB消息,Zenoh的吞吐量是CycloneDDS的约2倍,是FastDDS的约3倍。这主要归功于其高效的零拷贝协议设计和优化的序列化机制。而传统DDS实现在处理大消息时,需要进行消息分片和重组,引入了额外的CPU开销和延迟。
5.3 跨网络场景性能分析
在多机器通过100Gb以太网连接的测试场景中,网络传输成为性能的主要约束。此时,Zenoh的架构优势得以充分体现。其对等模式在8KB消息下可达51Gbps,接近网络带宽的理论上限(考虑TCP/IP协议开销,实际可用带宽约为44Gbps)。CycloneDDS的吞吐量约为14Gbps,FastDDS约为8Gbps。
延迟方面,Zenoh对等模式在跨网络场景下仍保持16微秒的低延迟,而CycloneDDS为37微秒,FastDDS约为45微秒。这一差距主要来源于协议栈的复杂度差异。Zenoh的报文格式更加紧凑,减少了网卡的DMA传输时间和对端的解析开销。
一个值得关注的测试结果是Zenoh在广域网环境下的表现。通过在两个地理位置相距较远的数据中心之间建立Zenoh路由器级联,即使在跨越多个自治系统的情况下,端到端延迟仍能控制在100毫秒以内,且消息丢失率低于0.01%。这一能力是传统DDS难以企及的,为云边协同的机器人应用提供了技术可能性。
5.4 资源占用与可扩展性
除了性能指标,资源占用也是实际部署中的重要考量。CycloneDDS的内存占用最低,单个节点约为10-20MB,适合资源受限的嵌入式设备。FastDDS的内存占用约为50-100MB,但其提供了丰富的功能特性作为代价。Iceoryx的RouDi守护进程需要预分配共享内存池,默认配置下约占用128MB,可根据应用需求调整。Zenoh路由器的内存占用约为30-50MB,处于中等水平。
Micro XRCE-DDS在资源占用方面具有压倒性优势:客户端库代码占用仅15-20KB,运行时RAM需求通常在5-10KB之间。这使其能够运行在Arduino、ESP32、STM32F1等资源极度受限的微控制器上。Agent端由于需要处理完整DDS协议,内存占用约30-50MB,但这完全由配套计算机承担,不影响嵌入式设备的资源预算。这种客户端-代理的分离设计,使Micro XRCE-DDS成为嵌入式物联网和微型机器人系统的理想选择。
可扩展性测试显示,在同一主机上运行大量节点时,不同中间件的表现差异明显。Iceoryx由于采用共享内存机制,节点数量对性能的影响最小,即使100个节点同时通信,延迟增长也不超过10%。而基于网络传输的方案,当节点数量超过50时,由于套接字资源竞争和内核协议栈负载增加,延迟可能增长50%以上。
6. 实战指南:中间件配置与切换
理论分析之后,本节将通过实际代码示例,展示如何在ROS2项目中配置和切换不同的中间件实现。得益于RMW抽象层的设计,这一过程通常不需要修改应用代码,只需调整编译配置和环境变量即可。