导读
机场跑道的安全状况直接关系到每一次起降。然而,目前全球大多数机场的跑道巡检仍然依赖人工步行目视------效率低、主观性强、难以形成数字化记录。一个自然的问题是:无人机+AI能否接管这项任务?
CERTH(希腊国家信息技术研究中心)联合荷兰特温特大学和克罗地亚Infra Plan咨询公司给出了一个完整的答案:一套覆盖数据采集、缺陷检测、状况评估到GIS地图生成的端到端自动化框架。该框架使用 DJI Matrice 300 RTK 无人机获取高分辨率影像,通过 U-Net+EfficientNet 对五类跑道缺陷进行像素级语义分割(平均 F1 达 70.92%),同时借助 SAM3(Segment Anything Model 3) 零样本分割跑道边界,最终将检测结果聚合到GIS环境中,生成类似 PCI(路面状况指数)的全跑道状况地图。
值得注意的是,这不是一个实验室验证------研究团队在克罗地亚 Zadar国际机场完成了全跑道实地飞行和检测,处理了 611 个分析单元,生成了覆盖整条跑道的缺陷分布图。结果清晰显示出飞机着陆区的轮胎痕迹高度集中(密度最高达 92%),为维护决策提供了直观的数据支撑。
论文信息
- 标题:Digitalization and Automation of Runway Inspection Using Unmanned Aerial Vehicles
- 作者:Marios Krestenitis, Alexandros Petropoulos, Ilias Koulalis, Irina Stipanovic, Sandra Skaric Palic, Konstantinos Ioannidis, Stefanos Vrochidis
- 机构:Centre for Research and Technology-Hellas (CERTH), Greece; Infra Plan Consulting, Croatia; University of Twente, Netherlands
- 发表:Sensors, 2026, 26(4), 1100
一、人工巡检已经跟不上了
根据欧盟法规 ADR.OPS.B015(Regulation (EU) 139/2014),机场必须对跑道运行区域进行持续监测以确保安全。实际操作中,巡检从每天多次的常规检查到周期性的详细状况评估,频率各不相同。
但问题在于:传统巡检方法几乎完全依赖人工,检查人员步行或乘车沿跑道观察,记录缺陷类型和位置。这种方式存在三个核心局限:
- 效率低:一条完整跑道的详细检查耗时长,且需要封闭跑道
- 主观性强:不同检查员对同一处缺陷的判断可能不一致
- 难以数字化:手工记录难以转化为可量化的维护决策依据
美国 FAA 和 ICAO 均已建立标准化的路面状况评估方法(如 ASTM D5340-20 定义的 PCI 指数),但人工采集数据本身就是瓶颈。本文的目标是用 UAV+AI+GIS 替代这个人工环节,实现从影像采集到缺陷地图的全流程自动化。
图片来源于原论文
二、四步闭环:从无人机到缺陷地图
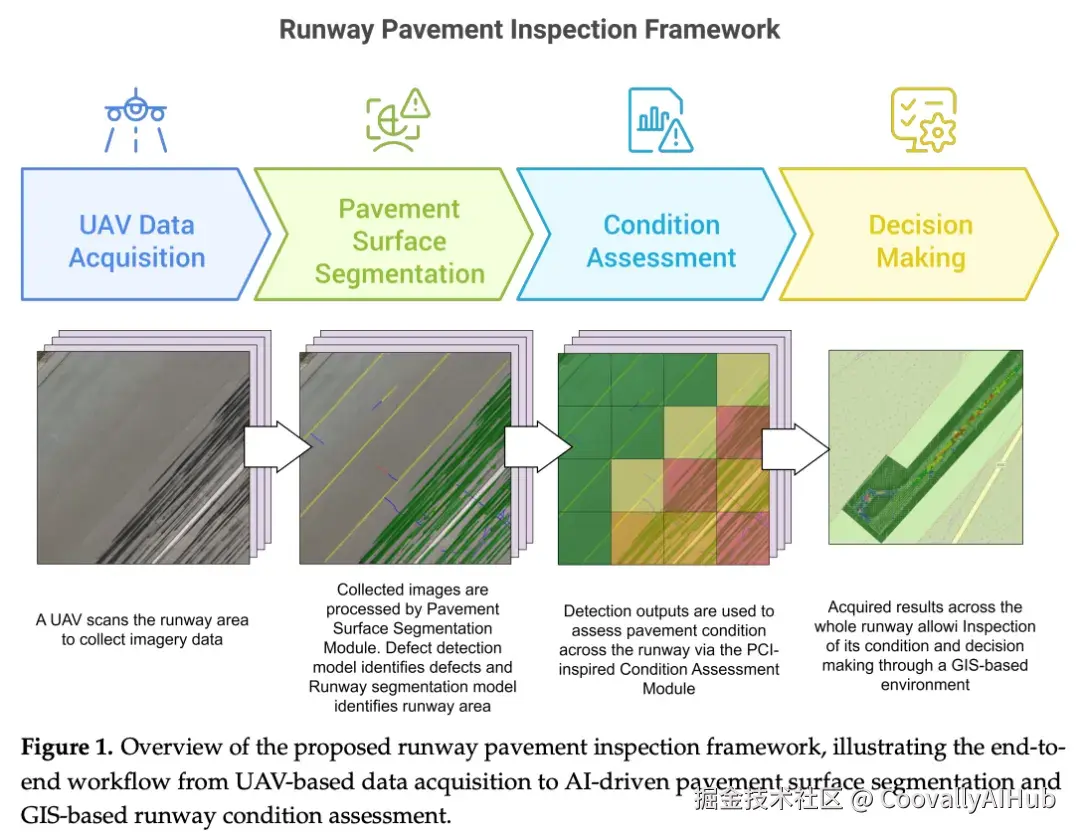
整个框架分为四个核心阶段,形成从数据采集到决策支持的闭环。
第一步:UAV 数据采集与正射影像生成
研究团队使用 DJI Matrice 300 RTK 搭载 Zenmuse P1 全画幅相机(35mm 焦距),按以下参数执行飞行任务:
| 参数 | 任务1(训练数据) | 任务2(全跑道评估) |
|---|---|---|
| 飞行高度 | 20 m | 32 m |
| 飞行时长 | 20 min | 60 min |
| 拍摄图像数 | 200 张 | 100 张 |
| 图像分辨率 | 4000×3000 像素 | 4000×3000 像素 |
| 前/侧向重叠率 | 70% / 70% | 70% / 70% |
| 拍摄间隔 | 0.7 秒 | 0.7 秒 |
拍摄完成后,使用 Pix4D 软件进行摄影测量处理,生成带有地理坐标(EPSG: 3765)的正射影像,然后裁切为 5000×5000 像素 的非重叠分析瓦片,全跑道共生成 611 个瓦片。地面采样距离(GSD)约为 0.00431 m/像素。
第二步:跑道边界分割------SAM3 零样本上阵
在检测缺陷之前,首先需要确定"哪里是跑道"。研究团队直接使用 Segment Anything Model 3(SAM3) ,以文本提示 "road, pavement, airport runway" 进行零样本推理,生成跑道区域的二值掩码。
这一步的意义在于:将非跑道区域(草地、标线外区域等)排除在后续分析之外,避免误检。SAM3 不需要任何针对跑道的微调,直接以预训练权重运行。
第三步:缺陷检测------U-Net + EfficientNet 像素级分割
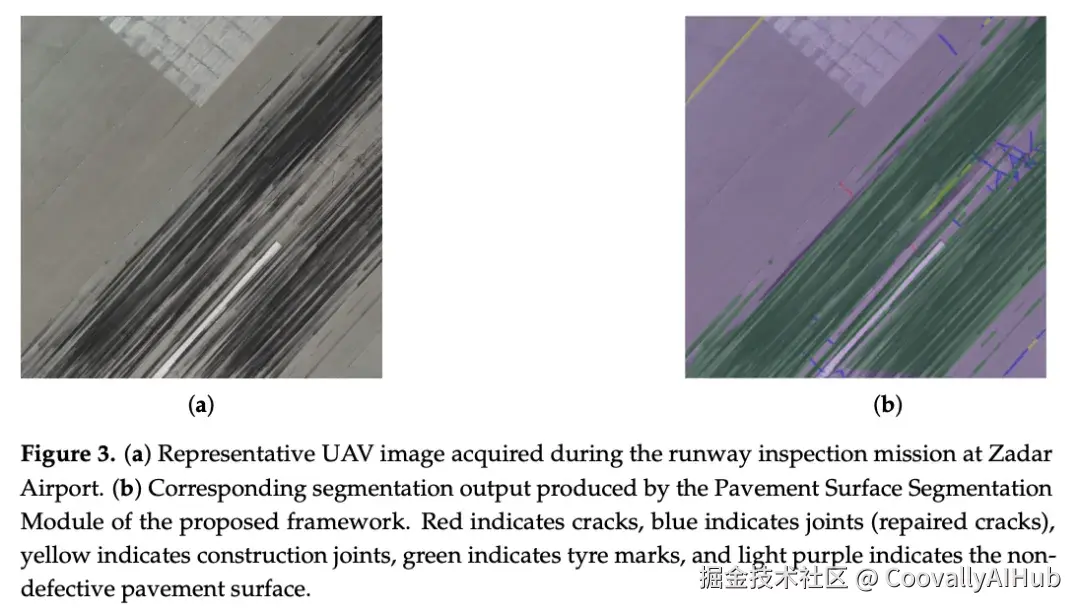
缺陷检测模块采用 U-Net 架构 + EfficientNet 编码器(ImageNet 预训练),对每个分析瓦片进行多类语义分割,输出五通道缺陷掩码。
检测的五类跑道缺陷:
| 缺陷类别 | 英文 | 特征描述 |
|---|---|---|
| 裂缝 | Crack | 细长表面裂纹,形态多样,最难检测 |
| 修补缝 | Joint (Repaired Crack) | 经过修补的历史裂缝区域 |
| 施工缝 | Construction Joint | 施工时留下的有规律间隔接缝 |
| 轮胎痕迹 | Tyre Mark | 飞机着陆时留下的橡胶沉积 |
| 背景 | Background | 无缺陷的正常路面 |
训练配置:
| 参数 | 设置 |
|---|---|
| 训练轮次 | 2000 |
| 批大小 | 12 |
| 优化器 | Adam |
| 学习率 | 10⁻³ |
| 损失函数 | Focal Loss(应对类别不平衡) |
| 输入尺寸 | 512×512 像素块(随机裁切) |
| 数据增强 | 随机水平/垂直翻转、亮度调整、缩放 |
训练数据来自任务1的 200 张图像,测试数据来自任务2的 100 张图像。两次任务在不同时间、不同高度、不同光照条件下执行,确保测试集具有真实的分布偏移。
图片来源于原论文
第四步:PCI 式状况评估与 GIS 地图生成
检测到缺陷后,框架将每个 5000×5000 像素瓦片划分为 4×4 网格 (16 个采样单元),每个单元约覆盖 5.4×5.4 m(~29 m²)。对每个采样单元计算 缺陷密度:
缺陷密度 = 缺陷像素数 / 跑道区域像素数
然后按照机场领域专家制定的阈值进行状况分级:
| 等级 | 状态 | 缺陷密度范围 |
|---|---|---|
| 1 | 良好(Good) | 0--40% |
| 2 | 尚可(Satisfactory) | 40--70% |
| 3 | 一般(Fair) | 70--85% |
| 4 | 差(Poor) | 85--100% |
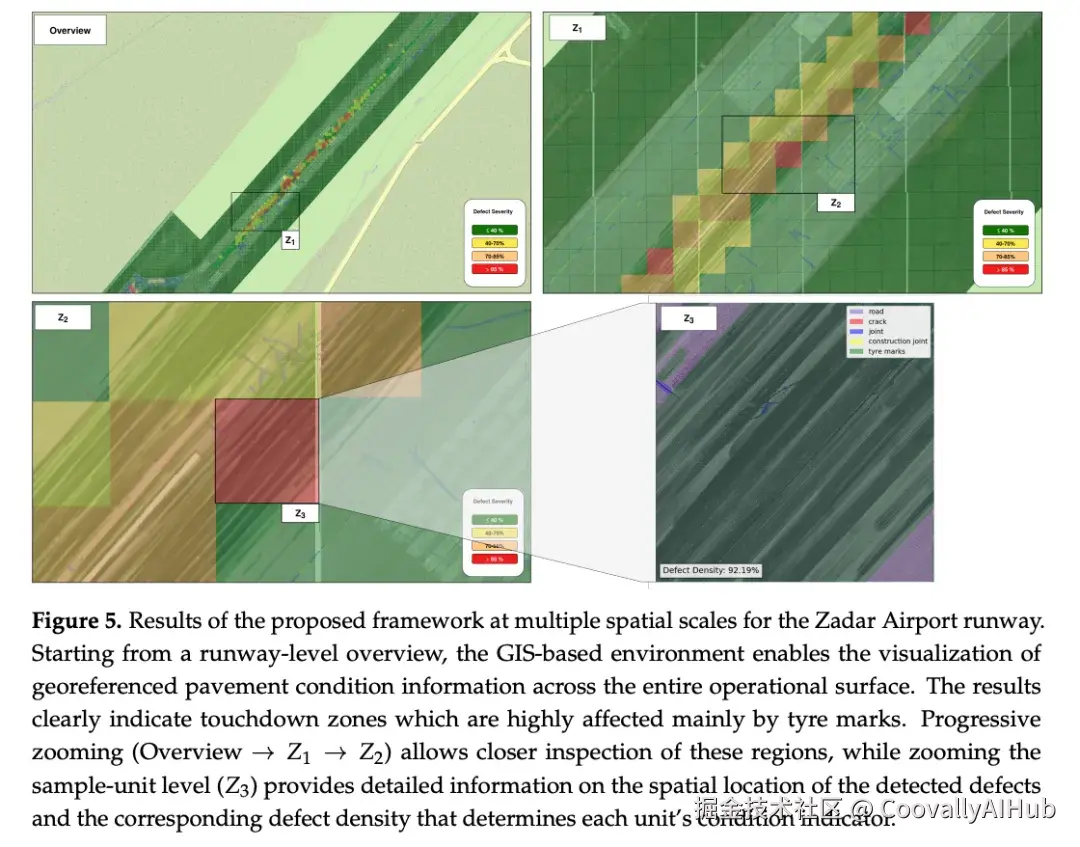
分级结果被映射回地理坐标,在 GIS 环境中生成 颜色编码的全跑道状况地图,支持从跑道全局→区域→采样单元的多级缩放查看。
图片来源于原论文
三、Zadar 机场全跑道验证结果
验证场地
研究选择克罗地亚 Zadar 机场(ICAO 等级 4D)作为实地验证场地。该机场位于 Zadar 市以东 7 公里,是一座同时服务民航和军用的中型国际机场,可起降 Boeing 737-800、Airbus A320/A319 和 Dash-8 Q400 等 C 类飞机。机场拥有两条沥青跑道,路面经过多年使用呈现不同程度的老化和缺陷。
缺陷检测模型性能
在 100 张测试图像上的逐类 F1 分数:
| 缺陷类别 | F1(%) | 说明 |
|---|---|---|
| 裂缝 | 56.99 | 最难检测------形态多样、像素占比小 |
| 修补缝 | 69.73 | 中等难度------与裂缝视觉相似 |
| 施工缝 | 69.70 | 几何规律性有助于识别 |
| 轮胎痕迹 | 87.29 | 最易检测------面积大、纹理特征明显 |
| 背景 | 99.09 | 占主导的非缺陷区域 |
| 平均(不含背景) | 70.92 | --- |
研究团队进一步报告了 边界 F1 分数(Boundary F1) ,该指标关注预测边界与真实标注边界的匹配程度,对细微的像素偏移更宽容:
| 缺陷类别 | 标准 F1(%) | 边界 F1(%) | 提升 |
|---|---|---|---|
| 裂缝 | 56.99 | 73.52 | +16.53 |
| 修补缝 | 69.73 | 83.79 | +14.06 |
| 施工缝 | 69.70 | 87.17 | +17.47 |
| 三类平均 | 65.47 | 81.40 | +15.93 |
注:此处"三类平均"仅包含裂缝、修补缝、施工缝三个类别(即论文报告了边界 F1 的类别),与上表中四类平均 F1(70.92%)的计算口径不同。
边界 F1 的大幅提升表明:模型对缺陷的结构位置和范围把握准确,标准 F1 偏低主要是像素级边界对齐的严格度导致的。
全跑道缺陷分布
以一个代表性瓦片(16 个采样单元)的缺陷密度数据为例:
| 主要发现 | 数据 |
|---|---|
| 轮胎痕迹最高密度 | 92.00%(单个采样单元) |
| 着陆区整体缺陷密度 | 53%--92% |
| 裂缝密度 | ≤0.16%(几乎可忽略) |
| 修补缝最高密度 | 4.55% |
全跑道 GIS 地图清晰显示:着陆区(touchdown zone) 是缺陷最集中的区域,轮胎痕迹占主导。这与航空安全实际高度吻合------轮胎橡胶沉积会降低跑道摩擦系数,直接影响飞机制动性能。
四、逐类分析:裂缝为什么最难检测?
虽然本文没有传统的消融实验,但逐类性能差异本身揭示了几个值得关注的问题。
裂缝检测的困难根源
裂缝的 F1 仅为 56.99%,是五类中最低的。论文分析了三个原因:
- 形态多样性:裂缝的宽度、走向和分支模式差异极大,不像施工缝那样有规律的几何形状
- 类别不平衡:裂缝在图像中占比极小(密度通常 ≤0.16%),背景像素占据绝对主导地位
- 像素级指标的惩罚效应:裂缝是细长结构,标准 F1 要求像素级精确对齐------即使模型准确定位了裂缝位置,只要宽度预测偏差 1-2 个像素,分数就会大幅下降
第三点在边界 F1 的对比中得到印证:裂缝的边界 F1 达到 73.52%,比标准 F1 高出 16.53 个百分点。这说明模型实际上"知道裂缝在哪里",但在像素级精度上存在不足。
轮胎痕迹为什么最易检测
轮胎痕迹的 F1 高达 87.29%,原因同样有三:面积大(单个采样单元密度可达 92%)、纹理特征与正常路面差异明显、在着陆区集中分布形成连续区域。这些特性天然有利于卷积网络的特征提取。
SAM3 作为跑道分割模块的适用性
论文选择 SAM3 做跑道边界分割而非缺陷检测,背后的逻辑是:跑道边界是相对规则的大面积区域,零样本提示("road, pavement, airport runway")足以胜任,避免了额外标注和训练成本。而缺陷检测则需要像素级精细分割,仍需专门训练的 U-Net 模型。
五、总结与思考
本文提出了一套完整的机场跑道自动化巡检框架,从 UAV 数据采集、AI 缺陷检测到 GIS 状况评估形成闭环,并在克罗地亚 Zadar 机场完成了全跑道验证。核心技术方案是 U-Net+EfficientNet 做缺陷分割(平均 F1 70.92%)+ SAM3 零样本分割跑道边界 + PCI 式缺陷密度分级。
框架的主要价值在于系统集成而非单一模型创新。U-Net+EfficientNet 并非最新的分割架构,70.92% 的平均 F1 也不算极高。但将 UAV 飞行规划、摄影测量、深度学习检测、PCI 标准和 GIS 可视化串联成可落地的工作流,这本身就是一项有工程价值的贡献。
在此基础上,有几点值得进一步思考:
- 数据规模是当前瓶颈。仅 200 张训练图像用于 5 类缺陷的分割训练,数据量偏小。论文也明确提到后续需要扩大训练集。如果能引入主动学习或基础模型的零样本能力来降低标注成本,框架的扩展性会更好。
- 缺陷类型覆盖有限。当前仅检测裂缝、修补缝、施工缝和轮胎痕迹四类缺陷(加背景共五类),尚未覆盖外来物体碎片(FOD)、变形类损伤等对安全同样关键的缺陷。论文将此列为未来工作方向。
- 状况评估阈值依赖专家经验。缺陷密度到状况等级的分级阈值(0-40% 为良好、40-70% 为尚可等)来自机场领域专家的建议,而非系统化的工程标准推导。不过框架设计为模块化结构,阈值可按需调整。
- 裂缝检测仍有提升空间。56.99% 的裂缝 F1 对于实际巡检来说偏低。结合边界 F1(73.52%)来看,模型定位能力尚可但像素精度不足。引入更细粒度的多尺度特征融合或专门针对细长结构优化的损失函数,可能有助于改善。