1、安装ubuntu18.04
2、安装ros
https://blog.csdn.net/zhuanzhuxuexi/article/details/132560816?spm=1001.2014.3001.5502
3、导入包
将另一台电脑的包U盘导入
4、新建空间
mkdir -p ~/catkin_ws/src && cd catkin_ws
# 安装依赖
sudo apt update -qq添加配置,防止报错
sudo gedit /etc/hosts在下面添加:
151.101.84.133 raw.githubusercontent.com保存关闭
sudo mkdir -p /etc/ros/rosdep/ sources.list .d
sudo gedit 20-default.list添加:
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead安装包
rosdep install --from-paths src --ignore-src -y提示缺少依赖:
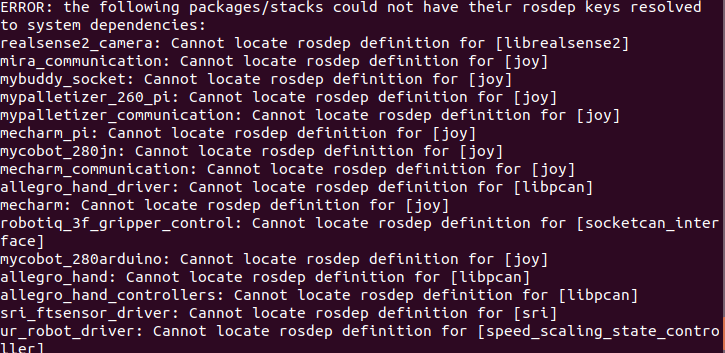
安装缺失的依赖
RealSense 相关:
-
librealsense2- Intel RealSense SDK -
sri- SRI 传感器驱动
机器人控制相关:
-
joy- ROS 游戏手柄控制包 -
libpcan- PCAN CAN 总线驱动 -
soem- EtherCAT 主站库 -
socketcan_interface- SocketCAN 接口
UR 机器人相关:
speed_scaling_state_controller- UR 速度缩放控制器
MoveIt 相关:
moveit_visual_tools- MoveIt 可视化工具
-
安装缺失的系统包
下载安装包
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense更新依赖库
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
安装依赖库
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev运行Intel Realsense许可脚本
chmod +x ./scripts/setup_udev_rules.sh
./scripts/setup_udev_rules.sh下载并编译内核模块
chmod +x ./scripts/patch-realsense-ubuntu-lts.sh
./scripts/patch-realsense-ubuntu-lts.sh编译SDK2.0
cd librealsense
mkdir build
cd build
cmake ..
-DCMAKE_BUILD_TYPE=Release
-DBUILD_EXAMPLES=false
-DBUILD_GRAPHICAL_EXAMPLES=false
-DBUILD_PYTHON_BINDINGS=false
-DUSE_RSUSB_BACKEND=true
-DDISABLE_FW=true # 关键:禁用固件下载
make
sudo make install更新软件源
sudo apt update
安装 RealSense SDK
sudo apt install ros-melodic-realsense2-camera
sudo apt install ros-melodic-realsense2-description安装游戏手柄支持
sudo apt install ros-melodic-joy
sudo apt install joystick安装 SocketCAN
sudo apt install ros-melodic-socketcan-interface
sudo apt install can-utils安装 MoveIt 工具
sudo apt install ros-melodic-moveit-visual-tools
sudo apt install ros-melodic-moveit-ros-visualization
2. 安装第三方库
PCAN 驱动:
# 从 Peak System 官网下载或编译
cd /tmp
wget https://www.peak-system.com/fileadmin/media/linux/files/peak-linux-driver-8.15.2.tar.gz
tar -xzvf peak-linux-driver-*.tar.gz
cd peak-linux-driver-*
make
sudo make install
sudo modprobe pcanSOEM 库:
# 编译安装 SOEM
cd /tmp
git clone https://github.com/OpenEtherCATsociety/SOEM.git
cd SOEM
mkdir build
cd build
cmake ..
make
sudo make installSRI 传感器驱动(如果找不到):
# 可能需要从源码编译
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/sri-ftsensor-driver.git对于 UR 机器人驱动:
# 安装 UR 特定控制器
sudo apt install ros-melodic-ur-robot-driver
sudo apt install ros-melodic-speed-scaling-state-controller
sudo apt install ros-melodic-joint-state-controller
sudo apt install ros-melodic-effort-controllers对于 Allegro Hand:
# 安装控制相关包
sudo apt install ros-melodic-gazebo-ros-control
sudo apt install ros-melodic-ros-control
sudo apt install ros-melodic-ros-controllers继续安装
# 再次运行 rosdep install
cd ~/catkin_ws
rosdep install --from-paths src --ignore-src -y
# 如果还有问题,尝试编译
catkin_make