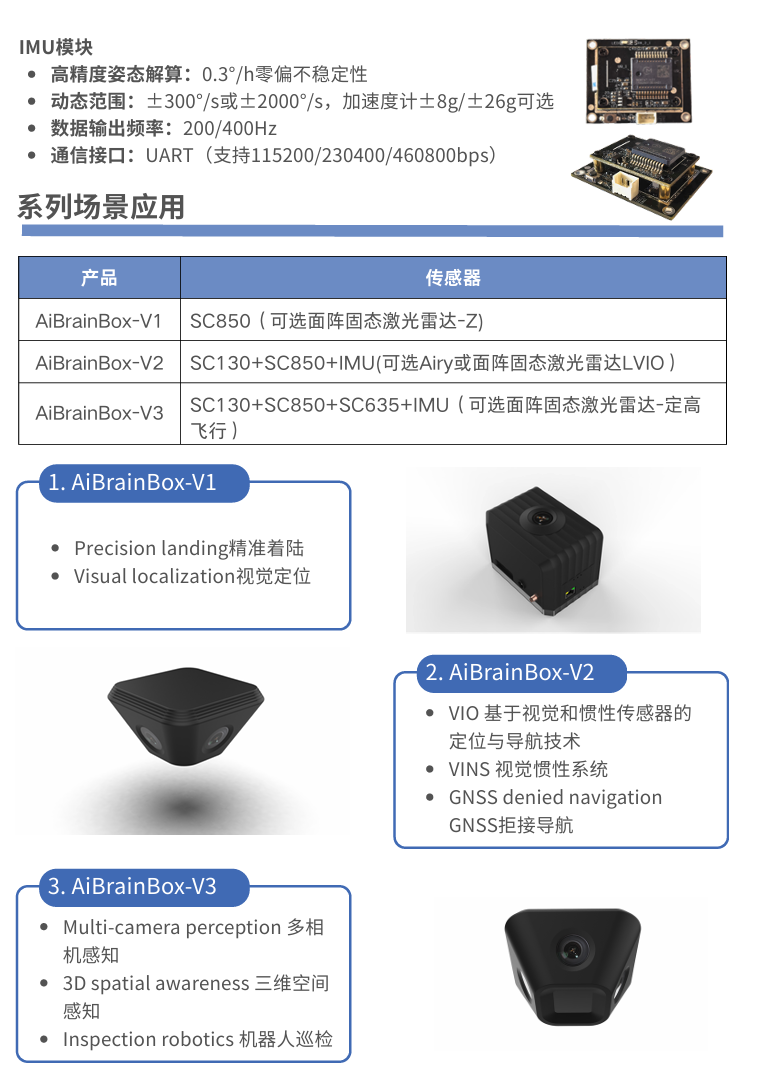
AiBrainBox-V:非对称多目相机无人机通感算控一体智能化底座-M350升级套件、让M350 升级为智能作业系统
AiBrainBox-V:非对称多目相机无人机通感算控一体智能化底座

行业无人机结构变化矛盾:
❗ "DJI平台封闭化 + 老平台退市 + 其他厂商不成熟"
面临的是:
-
M350在退场-目前只能是库存机以及二手机
-
M400在封闭-从M4系列开始,第三方设备不再被允许通过PSDK控制飞机、访问吊舱视频流等,仅支持获取无人机状态等基础功能。
-
市场上难有像M350性价比的无人机产品-飞行的稳定性、产品化成熟度以及包括保险等服务,价格等。其他厂家无人机难以比拟。
1️⃣ DJI Matrice 350 RTK
-
已被 DJI Matrice 400 替代
-
市场逐步进入:
-
存量(二手/库存)
-
维护周期(3--5年)
-
👉 结论:
M350是"存量市场",不是未来市场
2️⃣ M400趋势
-
更强性能(59min续航、6kg载荷)
-
更强通信(O4 + 40km)
-
更封闭生态(E-Port V2,多负载)
-
绑定妙算3,第三方机载设备不友好
👉 核心问题:
❗ 平台更强,但更"封闭化"
3️⃣ 非DJI厂商现实
-
成熟度:❌ 不稳定
-
生态:❌ 不完整
-
成本:❌ 不占优
👉 结论:
从飞行器、挂载、系统以及智能化和DJI差距愈来愈大,短期内无法替代DJI

行业低空无人化正确战略-M350/M300+AiBrainBox
🔥 "去飞行平台依赖 + 插件化能力输出"
-
减少对于飞行器的依赖
-
减少对于飞行器的通讯以及架构的依赖
-
解耦吊舱对于飞行器的绑定
👉 结论:
飞行器负责机载小脑,实现稳定飞行;挂载直接接入机载大脑;机载大脑负责通算等能力实现智能无人机,并提供开放接口和二次开发接口

🧩 市场策略
🟢 存量M350市场-M350智能化升级套件
"M350无人机智能化升级方案"
特点:
-
不换飞机
-
增加AI能力
-
增加通信能力
-
增加自动控制能力
🎯 目标客户:
-
电力 / 铁路等行业客户
-
高校/科研院所低空无人机算法和应用研究
M350/M300是最高性价比的行业无人机应用机算法研究的飞行平台
通、感、算、控一体的AiBrainBox,是无人化研究的智能底座
AiBrainBox = M350智能升级模块
🟢 1. AI能力
-
自动识别
-
自动跟踪
🔵 2. 通信能力
-
5G远程回传
-
Mesh组网
🟠 3. 自动控制
- AI驱动飞行(PSDK)
👉 结论:
-
人工减少 50%+
-
响应速度提升 2--3倍
-
可远程作业(跨区域)
市场:
-
电力巡检
-
应急安防
-
铁路巡检
-
高校/科研院所
🟠 绑定开放平台
👉 可控飞控平台:
-
PX4 / ArduPilot
-
国产无人机(如上飞等无人机)
AiBrainBox = "通感算控外挂飞控"
👉 形成能力:
-
GNSS拒止
-
SLAM飞行
-
自主控制
"真正无人机大脑"路线